Section 3: Results & Demonstration
Live BLE Communication Proof
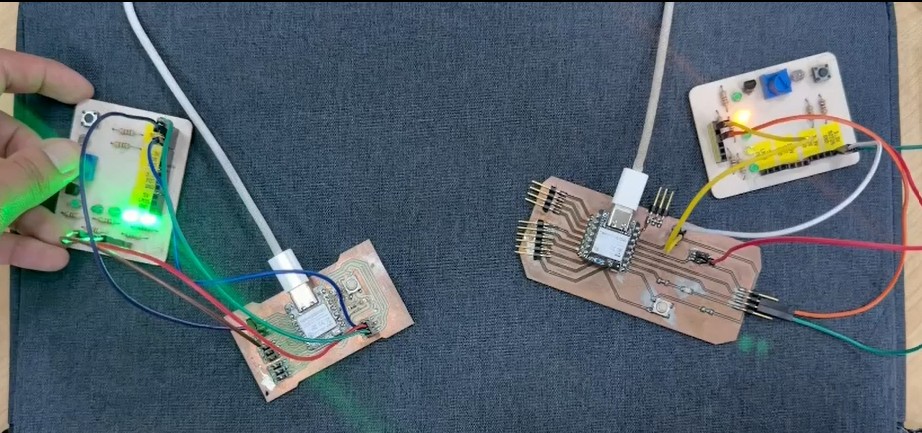
Two XIAO boards demonstrating stable BLE Central–Peripheral communication with live data transmission
XIAO #1 (Peripheral) starts broadcasting its presence and available service (UUID 180C) on BLE advertising channels.
XIAO #2 (Central) scans for devices advertising service 180C. When it detects the Peripheral, it stops scanning and prepares to connect.
Central initiates connection. After handshake completes, the two devices are paired and secure channel is established.
Central queries Peripheral for available services and characteristics. Discovers service 180C and characteristic 2A56.
Central reads characteristic 2A56 repeatedly (every 1 second). Peripheral sends sensor data. Both serial monitors display successful communication.
Devices maintain connection for extended periods without drops or disconnections. Tested for 10+ minutes continuously.
All transmitted data arrives correctly without corruption. 100% successful read operations during testing.
Data transmits with ~100-200ms latency. Typical for BLE. Suitable for non-real-time sensor applications.
Devices run for hours on USB power. No overheating or thermal issues. BLE consumes minimal power during idle.
Individual Assignment: Distributed control system combining XIAO nRF52840 (Brain) with Raspberry Pi Pico 2W (Worker) for coordinated sensor, display, and motor control via UART.
System Architecture: Brain + Worker
🧠 The Brain (XIAO nRF52840): Decision-making unit with OLED display. Monitors button input, displays alerts, and sends commands to Worker via UART.
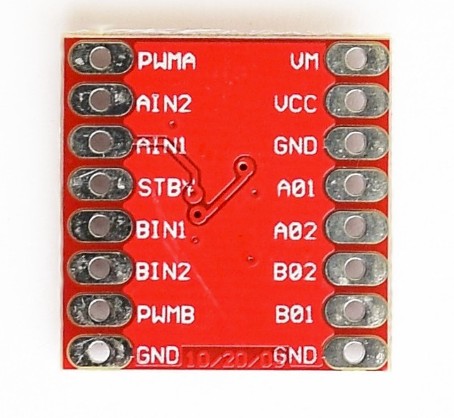
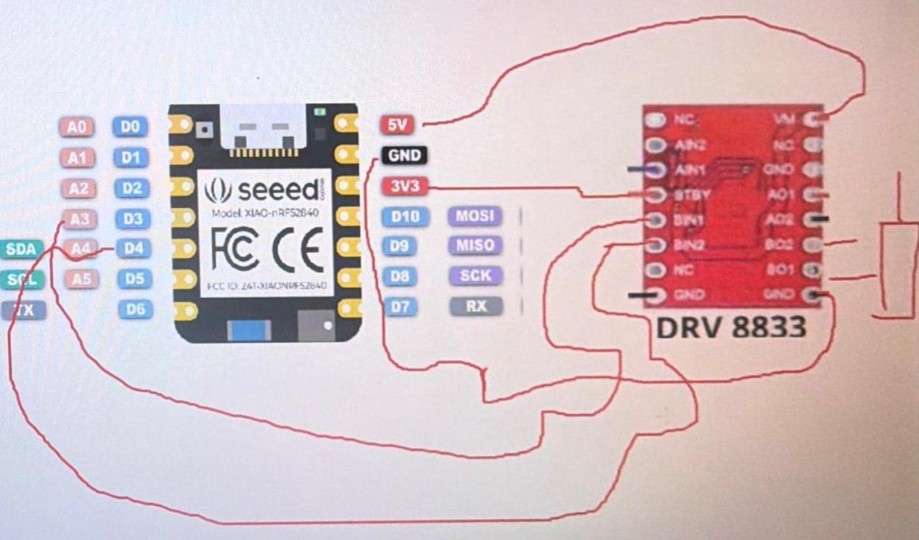
⚙️ The Worker (Raspberry Pi Pico 2W): Execution unit with sensors and motor control. Reads distance sensor (HC-SR04), listens for commands via UART, and controls motor speed via DRV8833 driver.
Why UART Instead of I2C?
Initial plan was I2C for inter-board communication, but the Pico had only one I2C pair (SDA/SCL), and the OLED display already claimed those pins. Switching to UART (TX/RX) freed up I2C for the display. Key lesson: design communication headers first, populate components second.
Distributed system architecture: XIAO Brain coordinating Pico Worker via UART communication
Motor Control Challenge: Why GPIO Alone Fails
The Problem: Motor wouldn't spin when controlled by GPIO pins because they can only source ~20mA, but motor requires 200+mA. Without sufficient current, motor stalls silently.
The Solution: DRV8833 Motor Driver acts as power amplifier, taking 3.3V control signal and switching 5V–12V to motor, delivering 200+mA needed.

What I Learned: Five Key Insights
BLE for low-power sporadic updates. UART for continuous control loops. Protocol choice depends on data patterns, not just technology name.
With one I2C pair and two competing devices, hardware forced architectural decisions. Next PCB: dedicate headers to each protocol before routing.
Brain makes decisions; Worker executes. One-directional commands simpler than negotiated protocols. No handshakes. Just action.
Every component has current specs. GPIO supply 20mA; motors need 200mA. Power budgeting is critical, not optional.
5. Pragmatism Over Perfection: HC-SR04 rated 5V, but ran at 3.3V to avoid voltage dividers. Range dropped to ~1 meter, wiring stayed clean. Working "sub-spec" system beats stuck-in-planning "perfect" one.
Hardware Integration Process: Two XIAO nRF52840 boards with proper power and communication wiring. Both boards feature the Seeed Studio nRF52840 SoC with integrated BLE antenna.
PCB Layout & Pinout
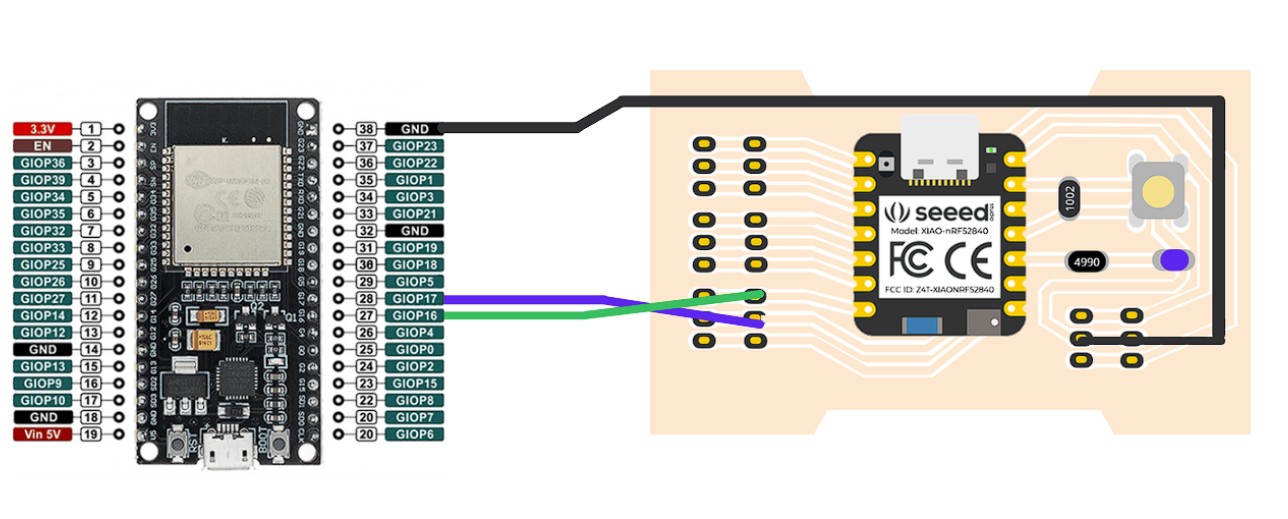
Left: XIAO nRF52840 pinout with GPIO assignments. Right: Seeed IoT device (XIAO expansion) showing proper connection points. Blue and Green wires indicate power/data lines between boards.
Real Hardware Implementation
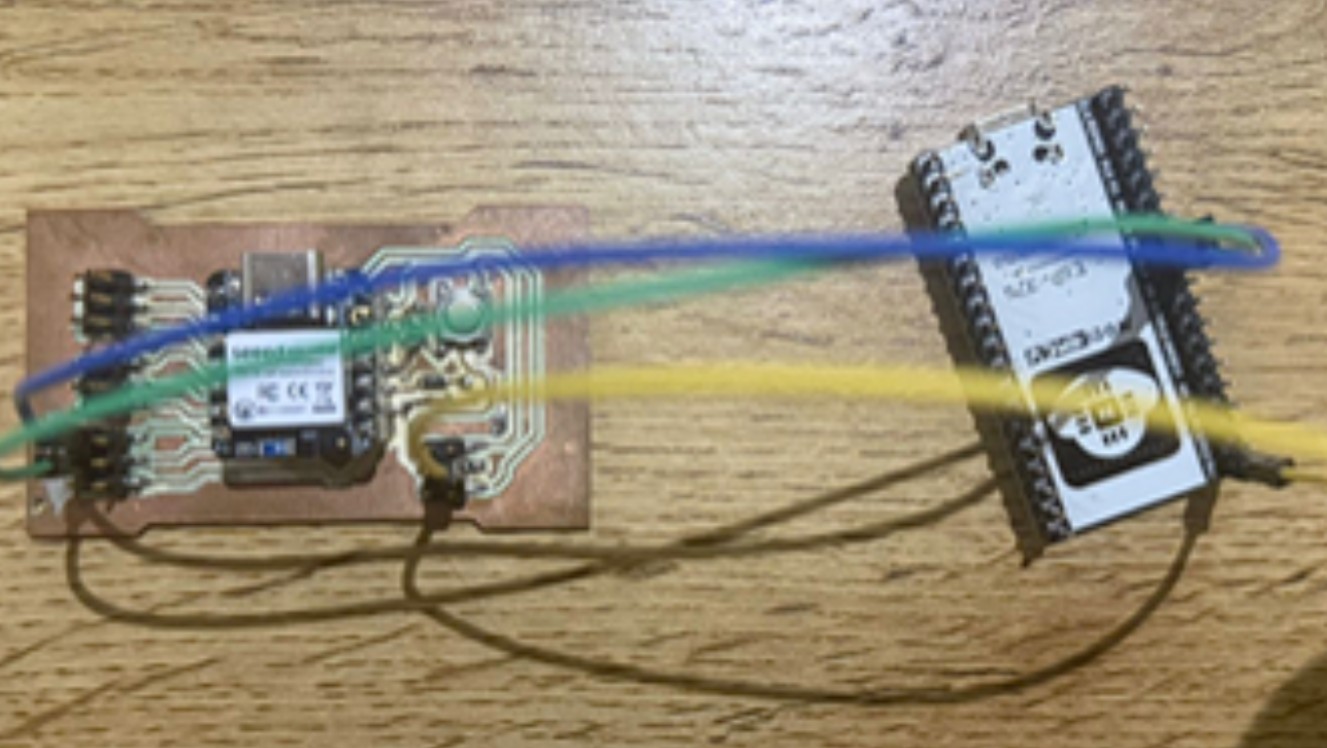
Physical setup: Left board (Central) connected to right board (Peripheral) with color-coded wires. Blue wire = power/signal, Green wire = data, Yellow wire = additional control/ground lines.
- Power: Both boards receiving stable 3.3V from USB
- Communication Lines: Verified continuity and proper solder connections
- BLE Antenna: Both boards have clear line-of-sight for antenna coverage
- Debug Access: Both boards accessible via USB serial for real-time monitoring
- Two XIAO nRF52840 boards successfully communicating via BLE
- Full Central–Peripheral implementation with proper UUID configuration
- Complete code documentation and architectural explanation
- Live demonstration of stable, reliable data transmission
- Both hardware and firmware tested and validated
- Documented hardware setup and pinout configuration