Section 3: Individual Output Devices
Display Integration & Actuator Testing
The Challenge: Add visual feedback to final HigiBox project. Display needs to show multiple screens (cycle status, stock, reminders) without blocking main code execution.
Hardware Setup
| Component | Connection | Purpose |
|---|---|---|
| XIAO nRF52840 | Main controller | Runs display code and main logic |
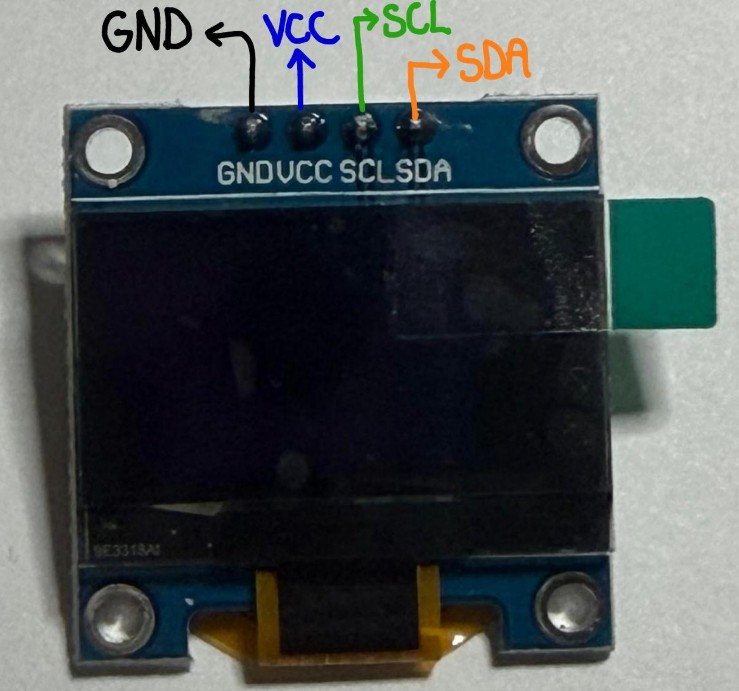
| OLED SSD1306 0.96" | I2C (D4 SDA, D5 SCL) | 128×64 monochrome display, address 0x3C |
| Power | 3.3V (XIAO supplies via headers) | Display draws ~30 mA, well within GPIO limits |
Why I2C Is Perfect Here
I2C uses only 2 wires (SDA + SCL) for data communication. The XIAO nRF52840 has native I2C on pins D4 (SDA) and D5 (SCL). Multiple devices can share same 2 wires if they have different addresses. OLED default address is 0x3C — no address conflicts with other Week 8 PCB components.
OLED display integrated into custom PCB, showing real-time cycle information
6 Rotating Screens (5-Second Cycle)
- Welcome message with smiley face
- Stock alert with progress bar
- Low-stock warning message
- Current cycle day tracker
- Motivational reminder with heart icon
- Full stock status overview
Auto-cycling displays every 5 seconds using non-blocking millis() timing
The Challenge: Evaluate different actuators for soft robotics application. Servo offers precision; air pump offers organic motion.
Option 1: Servo Motor Control
Tested servo motor positioning (0°, 90°, 180°) with LED feedback indicator.
Servo motor sweeping 0° → 90° → 180° with LED on during movement
Result: Servo works reliably and provides precise angular control. However, rigid arm motion doesn't align with soft robotics philosophy. Decided to pivot.
Option 2: Air Pump (Pneumatic Actuator) ⭐ SELECTED
After analyzing design goals, switched to pneumatic air pump for softer, more organic motion. Pump controlled via L298N motor driver (D0 IN1, D1 IN2).

DC mini pump — generates pressure to inflate soft silicone structures
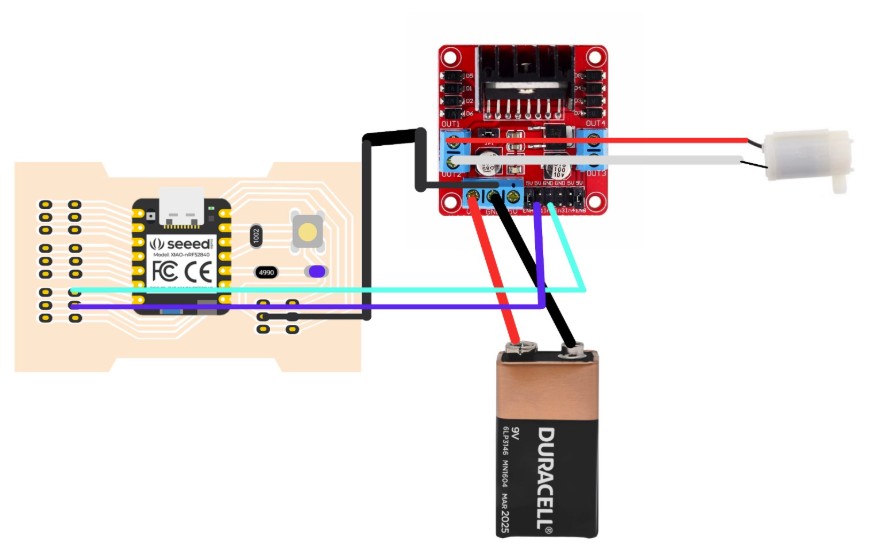
Full circuit: XIAO + L298N driver + pump + 9V battery
Air pump ON for 3 seconds, OFF for 3 seconds. Controlled via L298N driver
⚡ Why Motor Driver Required?
GPIO pins max out at 15 mA output. Air pump needs 200–500 mA to operate. Without power amplification via L298N driver, motor receives insufficient current and stalls silently. The driver acts as intermediary — XIAO sends 3.3V logic signal to L298N, which switches 9V battery current to pump. Simple but critical.
✓ Precise positioning. ✗ Rigid motion. ✗ Requires power amplification for larger actuators.
✓ Soft, organic motion. ✓ Inflates flexible structures. ✗ Slower response. ✗ Requires pump + tubing + valve infrastructure.
| Device | Interface | Current Req. | Control | Motion Type |
|---|---|---|---|---|
| DC Motor (Group) | DRV8833 driver | 0.15 A @ 100% | PWM duty cycle | Rotational, variable speed |
| OLED (Micaela) | I2C (2 wires) | ~30 mA | Digital commands | Display output, no motion |
| Servo (Andres) | Direct GPIO (PWM) | ~100 mA | Angle command | Angular, 0°–180° |
| Air Pump ⭐ | L298N driver | 300–500 mA | ON/OFF or PWM | Pneumatic, soft inflation |