Invention, Intellectual Property and Income
Dissemination Plan
My dissemination plan is based on the open-source philosophy that governs the maker community and the Fab Academy. The portable robotic arm controller project will be released under a Creative Commons CC BY-NC-SA license. All technical documentation, 3D models, PCB fabrication schematics and files, as well as the C++ source code, will be available in my Fab Academy repository.
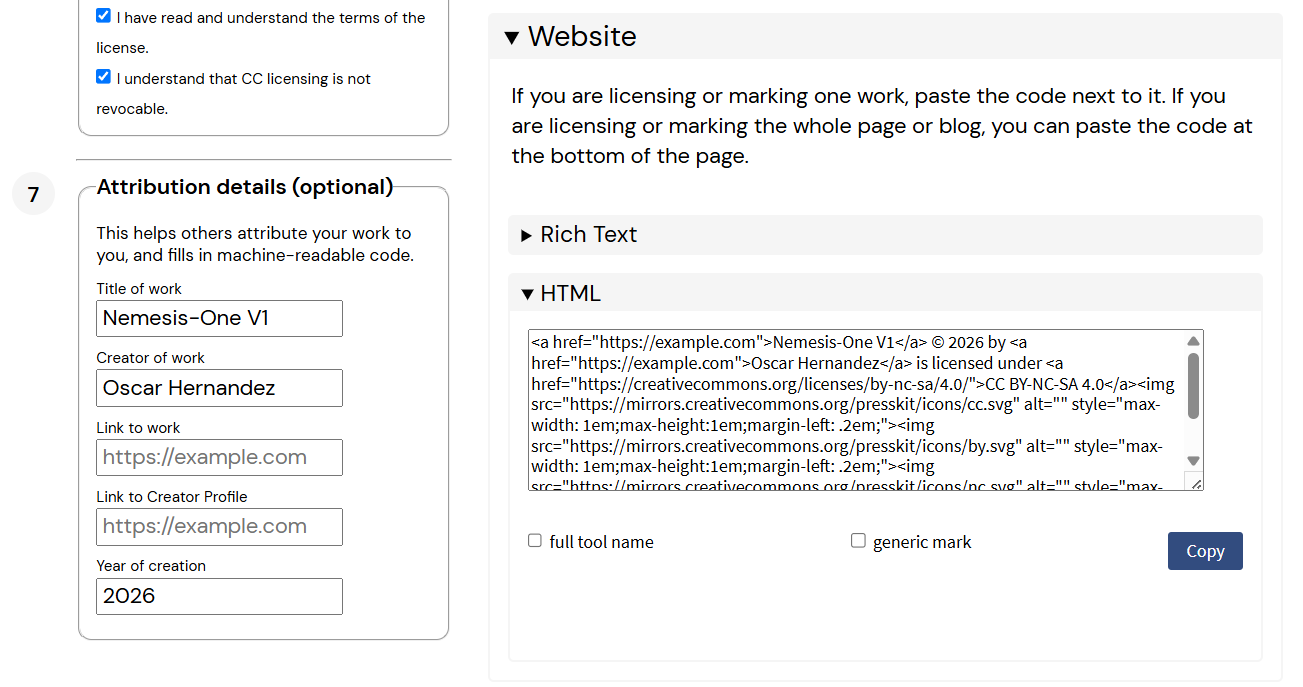
Nemesis-ONE © 2026 by Oscar Hernandez is licensed under CC BY-NC-SA 4.0
To find out which license to use, I went to the Creative Commons website, to the Selection section, where I was able to answer a questionnaire to adapt the license to my preferences.
Creative Commons
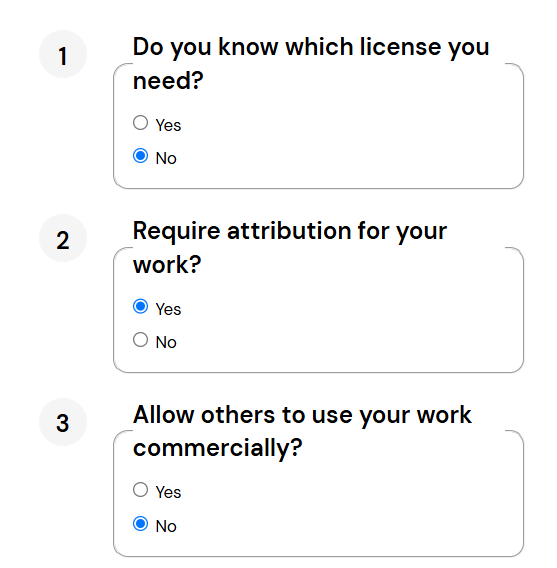
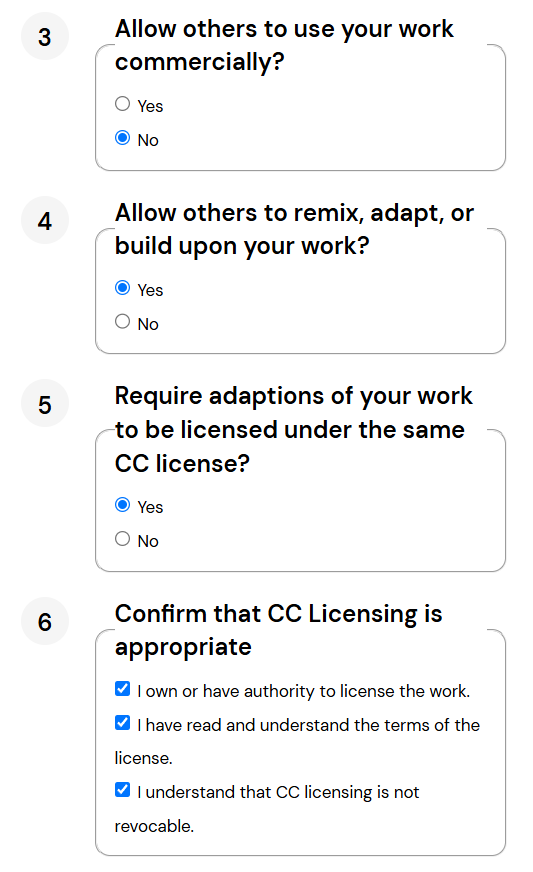
After answering the questions, I wrote the attribution details. It's important to note that I couldn't put any link to my project or my page since the page didn't generate the license with the links. Once the license was created, the page offered the option to generate the HTML code to place the license on my page.
Future Possibilities
For version 2.0 of the glove, I'd love to add haptic feedback. The idea is that when you grip something with the claw, you'd feel a vibration in your fingers indicating the force you're applying.
What tasks have been completed, and what tasks remain?
What is already done:
- The 3D design and printing of all parts, including the glove's bracelet and finger pieces, as well as the mechanical structure of the arm.
- The milling and soldering of my custom boards.
- All the code's math: the median and smoothing filters to remove noise from the flex sensors, and the complementary filter for the MPU6050.
- The peer-to-peer wireless network using ESP-NOW.
- The mechanical correction of the axis wobbling.
What I still need to do:
- The final assembly of the electronics inside their 3D-printed enclosures.
- Properly routing the cables (cable management) on the arm so they don't tangle when it moves.
- Shooting and editing the Hero Video.
What's working? What's not?
What is working at 100%: The mechanics and local electronics. The independent movement of the arm works wonderfully. When I upload a direct test code to the receiver board, the servomotors and stepper motor respond precisely, the drivers do their job, and the structure moves smoothly and robustly.
What is not working (Troubleshooting): The wireless communication is giving me headaches. Currently, the link via the ESP-NOW protocol between the glove and the arm is failing. The sensor data is filtered well in the glove's microcontroller, but the arm is not receiving or interpreting it correctly to trigger the motors in real-time. Right now, my absolute priority is to isolate this bug.
What questions need to be resolved?
Now in the final stretch, my critical doubts to move forward are:
- Why are the ESP-NOW packets failing? Is it a problem with the configured MAC address, a discrepancy in the data structure (struct) shared between both codes, or the Wi-Fi network channel?
- Once the communication works: How much real weight will the claw hold before the servomotors lose torque and give out?
- When all motors move at the same time in response to the glove, will the consumption peak cause a voltage drop (brownout) that resets the receiver microcontroller?
Planned what will happen when?
My attack plan to finish on time this week is:
- Days 1-2: Exclusive dedication to the code. Debugging ESP-NOW by sending simple data first (like turning on a remote LED) before sending the complex sensor arrays.
- Days 3-4: Finish the physical assembly, hide the cables well, run mechanical stress tests, and adjust the driver voltages.
- Day 5: Shoot the video clips mimicking my hand movements with the teleoperation already working.
- Days 6-7: Edit the Hero Video, put together the final slide, and polish this documentation page.
What have you learned?
I learned the hard way that system integration is the real challenge. Making a board, a mechanical structure, or a movement code separately is one thing, but getting them to talk to each other wirelessly is a whole different story.
I understood that in hardware and software development, isolating problems is vital. Knowing that the arm works perfectly mechanically allows me to focus all my energy solely on debugging the network protocol without doubting my power electronics. And of course, I learned how important it is to protect the 3.3V logic lines from the 12V power circuits in the early stages.