Project Overview
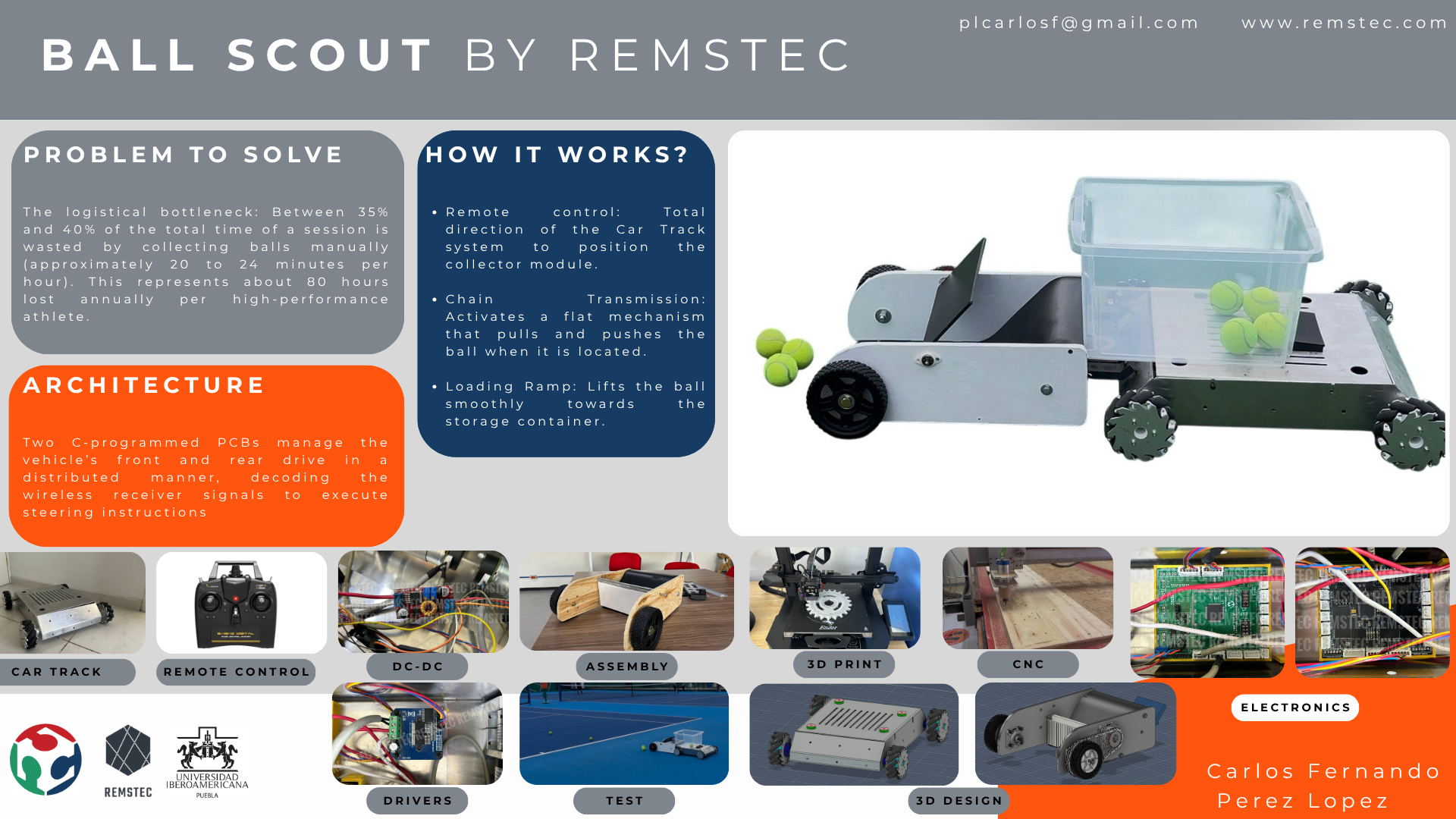
The project consists of developing a tennis ball collecting machine, designed to automate a process that is currently performed manually in clubs and sports academies. By integrating a traction system like "Car Track" powered by Artificial Intelligence, the device identifies, chases and collects balls autonomously. This makes it possible to optimize training time, reduce the physical effort of staff and improve operational efficiency within sports facilities.
About the Company
REMSTEC www.remstec.com is a company dedicated to the development of cutting-edge technology, specializing in embedded products powered by Artificial Intelligence. Their job is to integrate advanced processing capabilities directly into the hardware for real-time decision making. In addition, they focus on the training of technical talent through PLC and advanced systems trainings, always maintaining the pride of producing disruptive technology designed and materialized entirely by their own engineering.
The Problem to Solve
In tennis, success is directly linked to the repetition frequency of strokes and the intensity of training. However, handpicking balls acts as a logistical bottleneck.
Technical & Physical Impact
- Declines in Muscle Memory: The development of elite technique requires a high volume of controlled impacts. By losing 40% of the time, a player performs approximately 150 to 200 reps less per session than an automated court would allow.
- Physical wear and tear of the technical staff: The technical staff performs hundreds of lumbar flexions daily to empty baskets and collect balls from the ground. This repetitive effort generates accumulated fatigue, postural problems (chronic lumbalgia) and reduces the energy that the coach should channel to correct the technique.
The Psychological Toll: Breaking the 'Flow State'
In sports psychology, the Flow State is the zone of maximum concentration where the athlete performs movements semi-unconsciously and optimally.
- Each time the training stops abruptly for 3 or 5 minutes to "clean the court", the player’s heart rate drops dramatically and their mental focus is broken.
- Restarting the session requires a new period of readjustment and warm-up, preventing the athlete from maintaining the intensity needed to simulate real match situations.
Design & Planning
The system was designed using a modular approach. Using Fusion 360 for mechanical design and KiCad for the custom PCB control system.

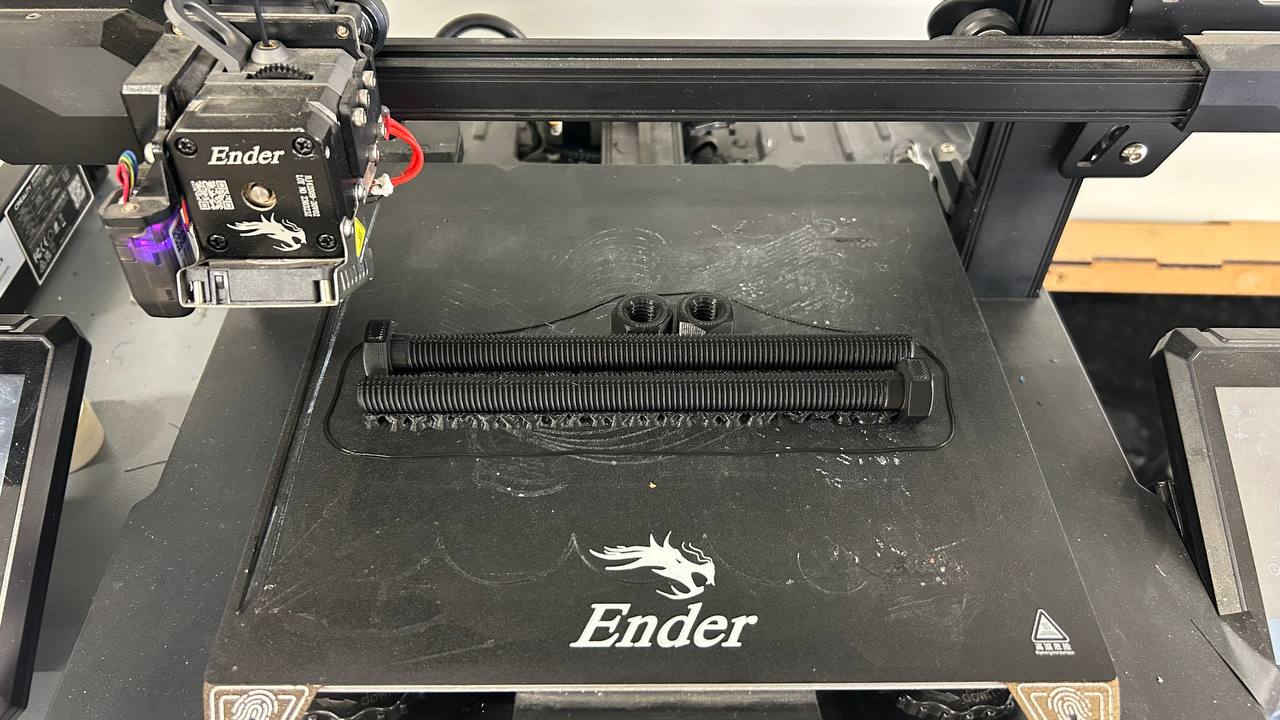






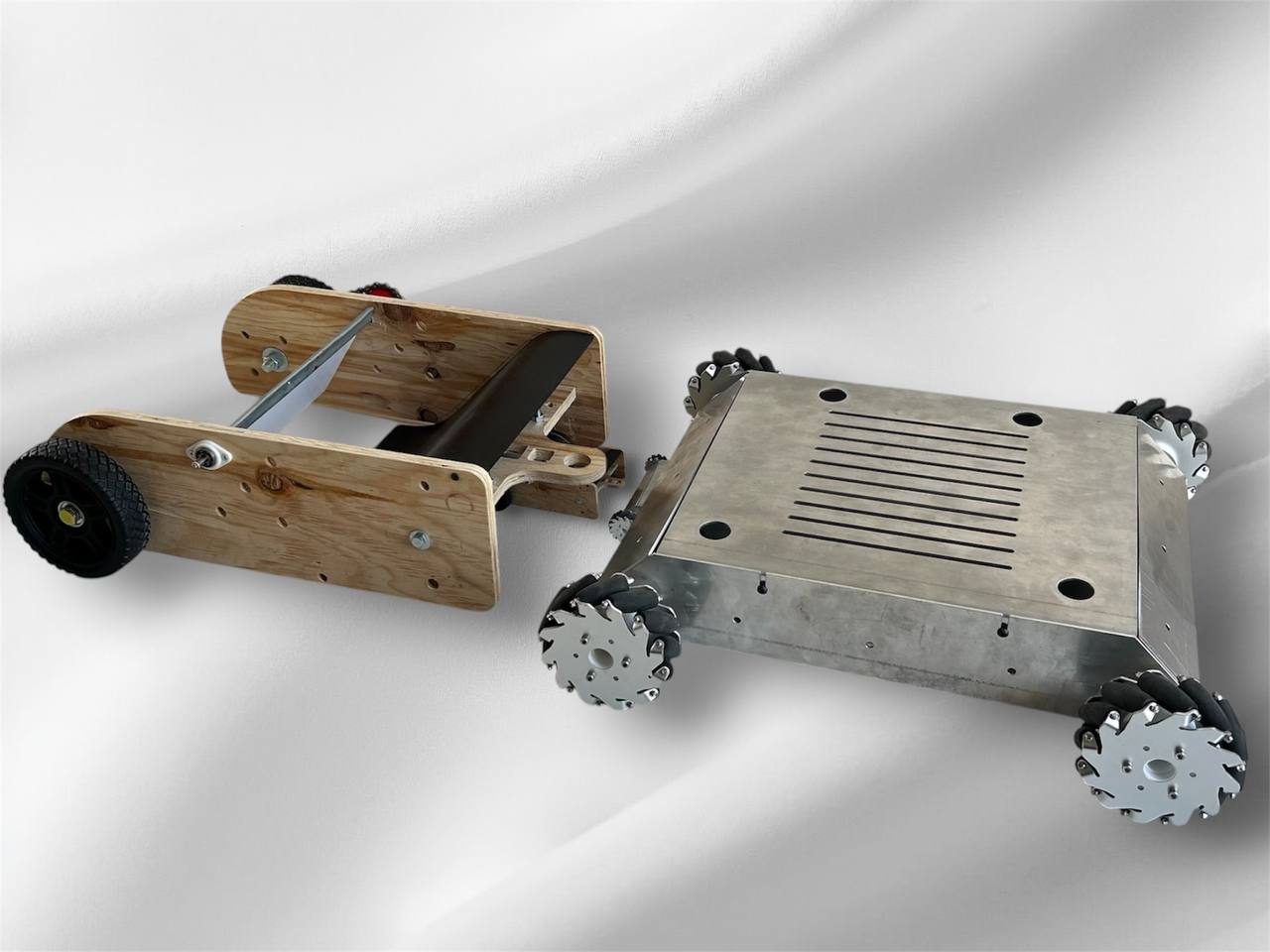
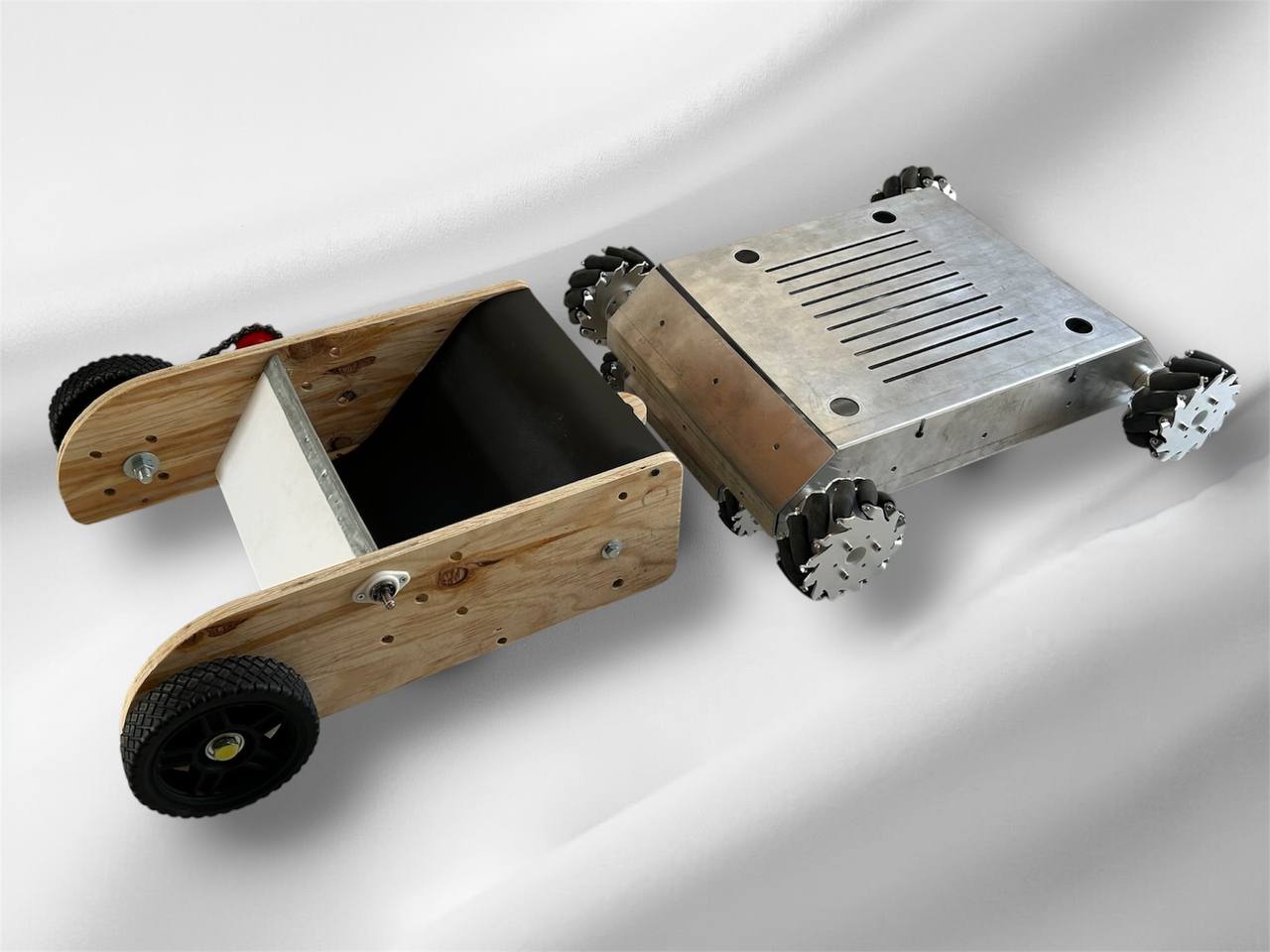
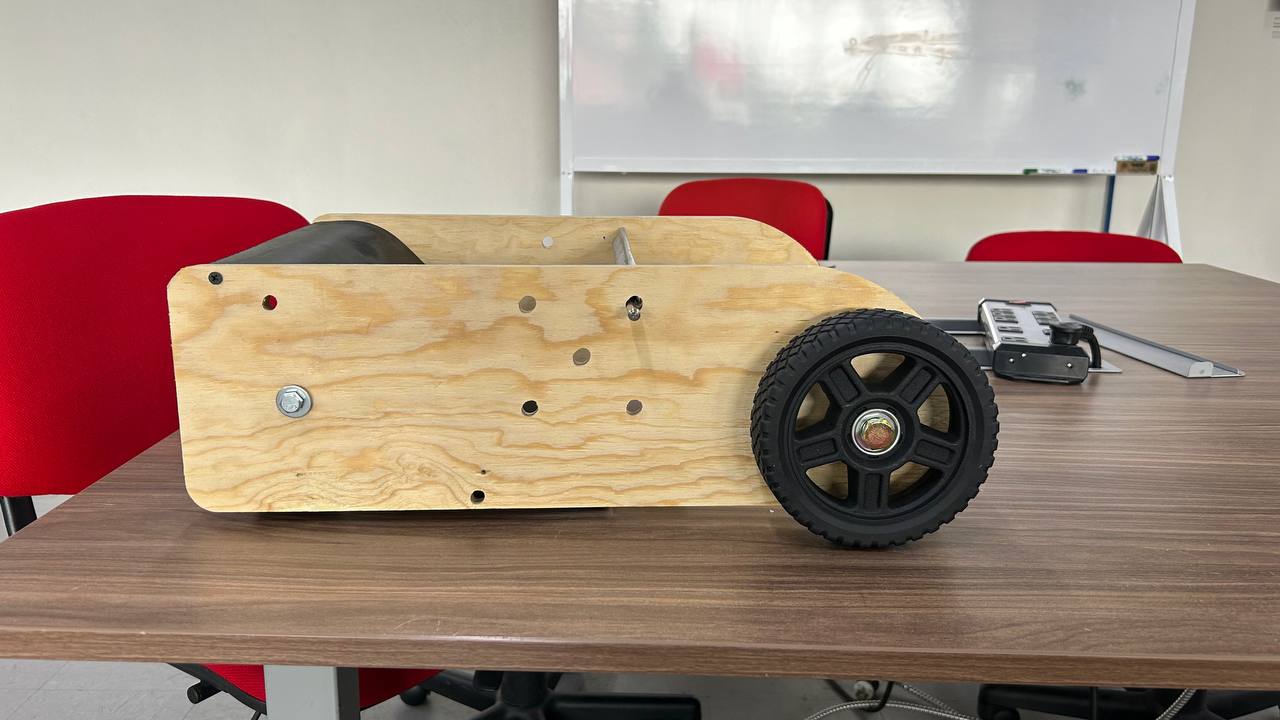
Mechanical Prototyping
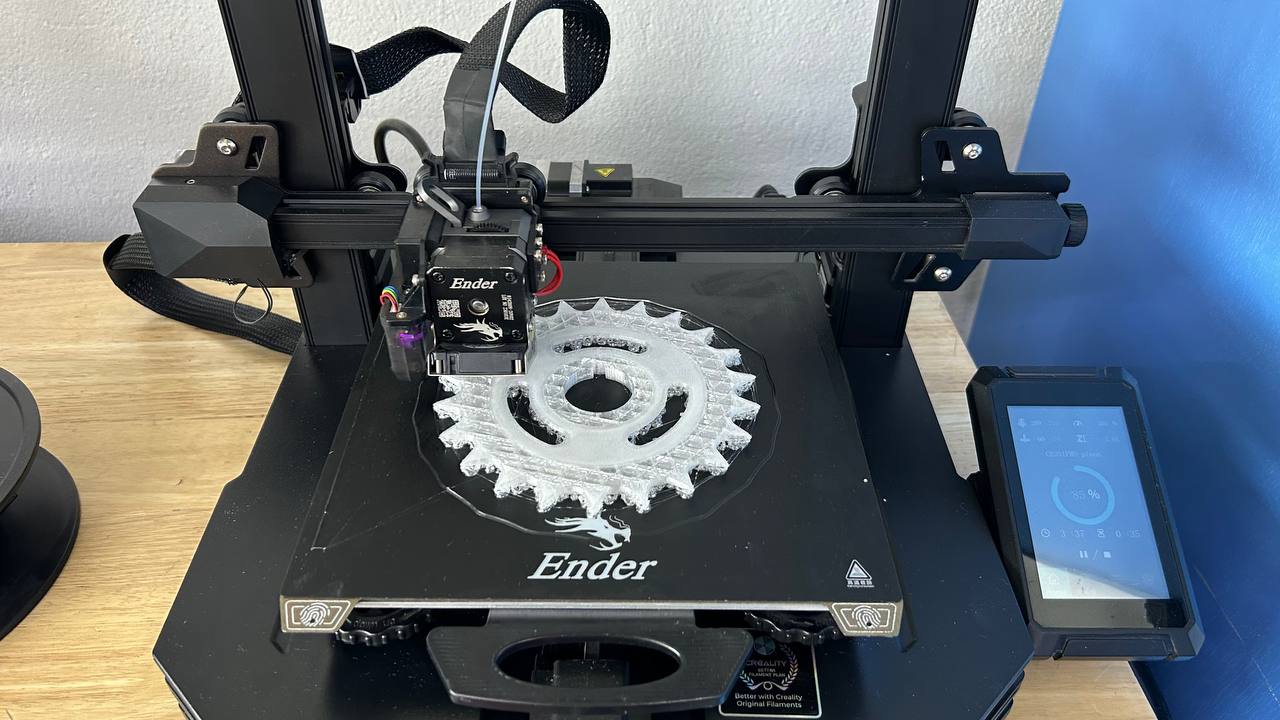
3D printing and laser cutting processes for chassis and mechanical components development.



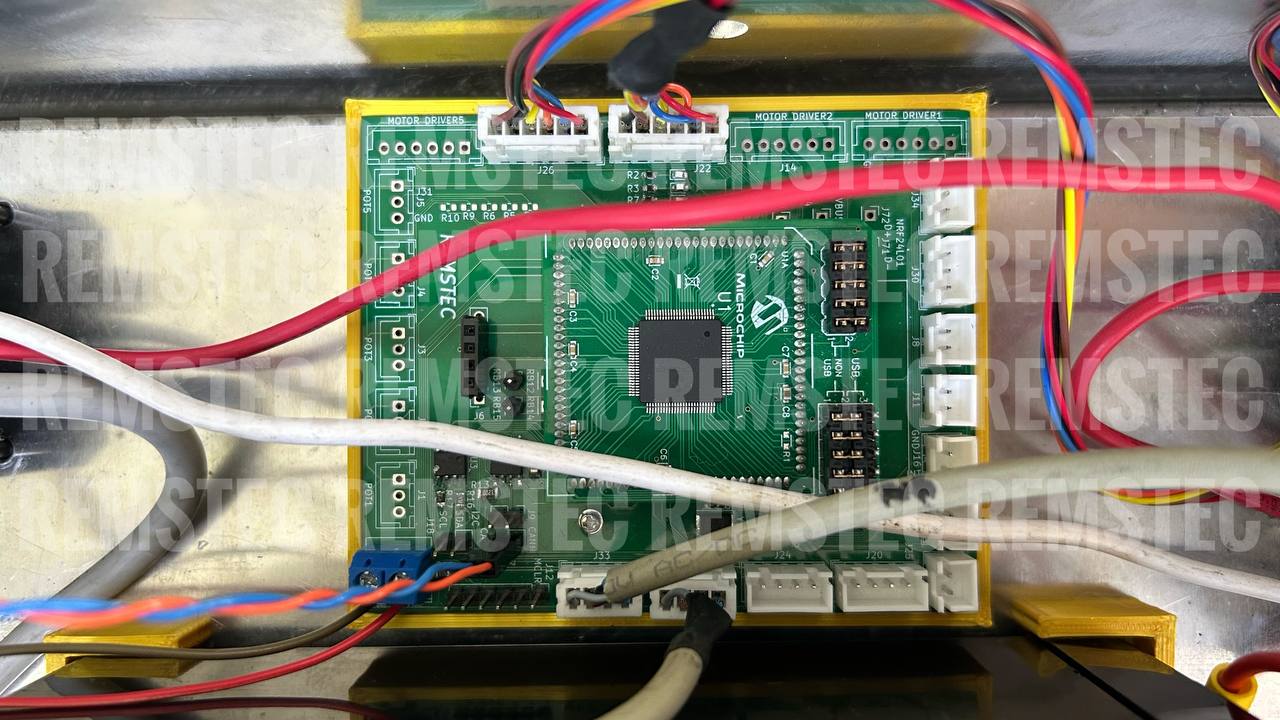
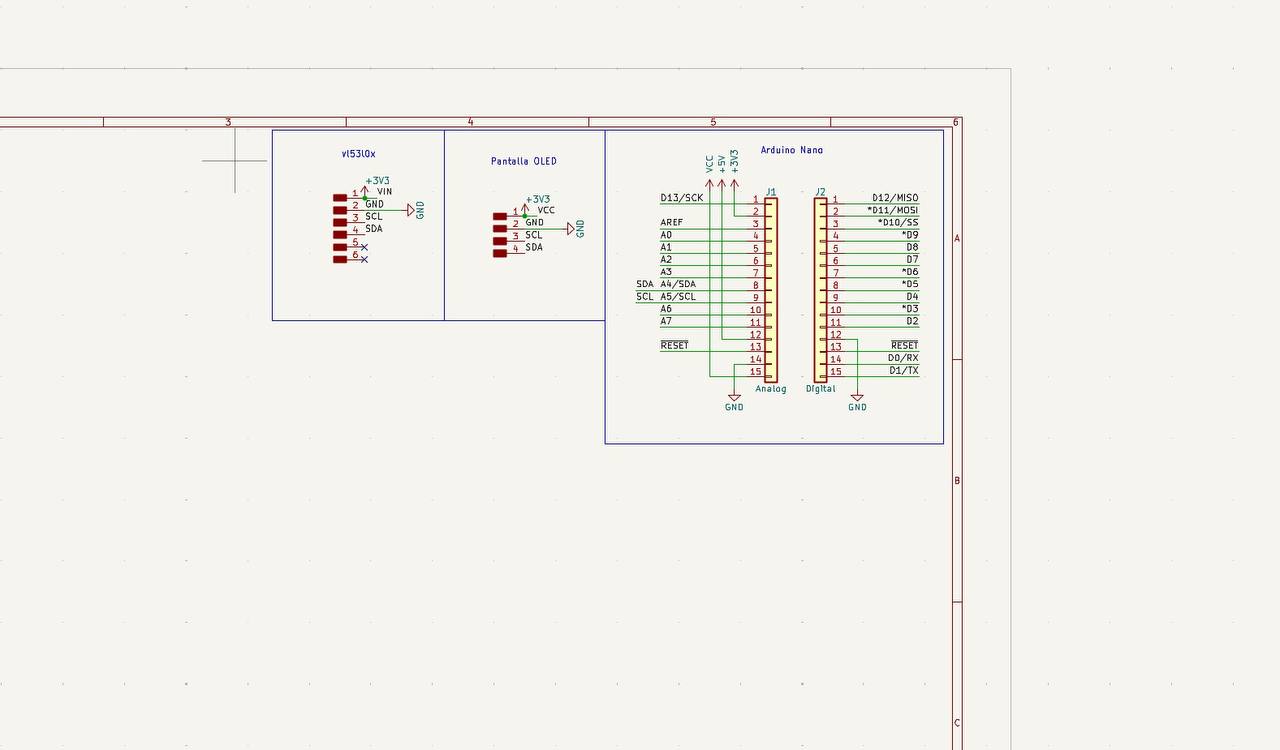
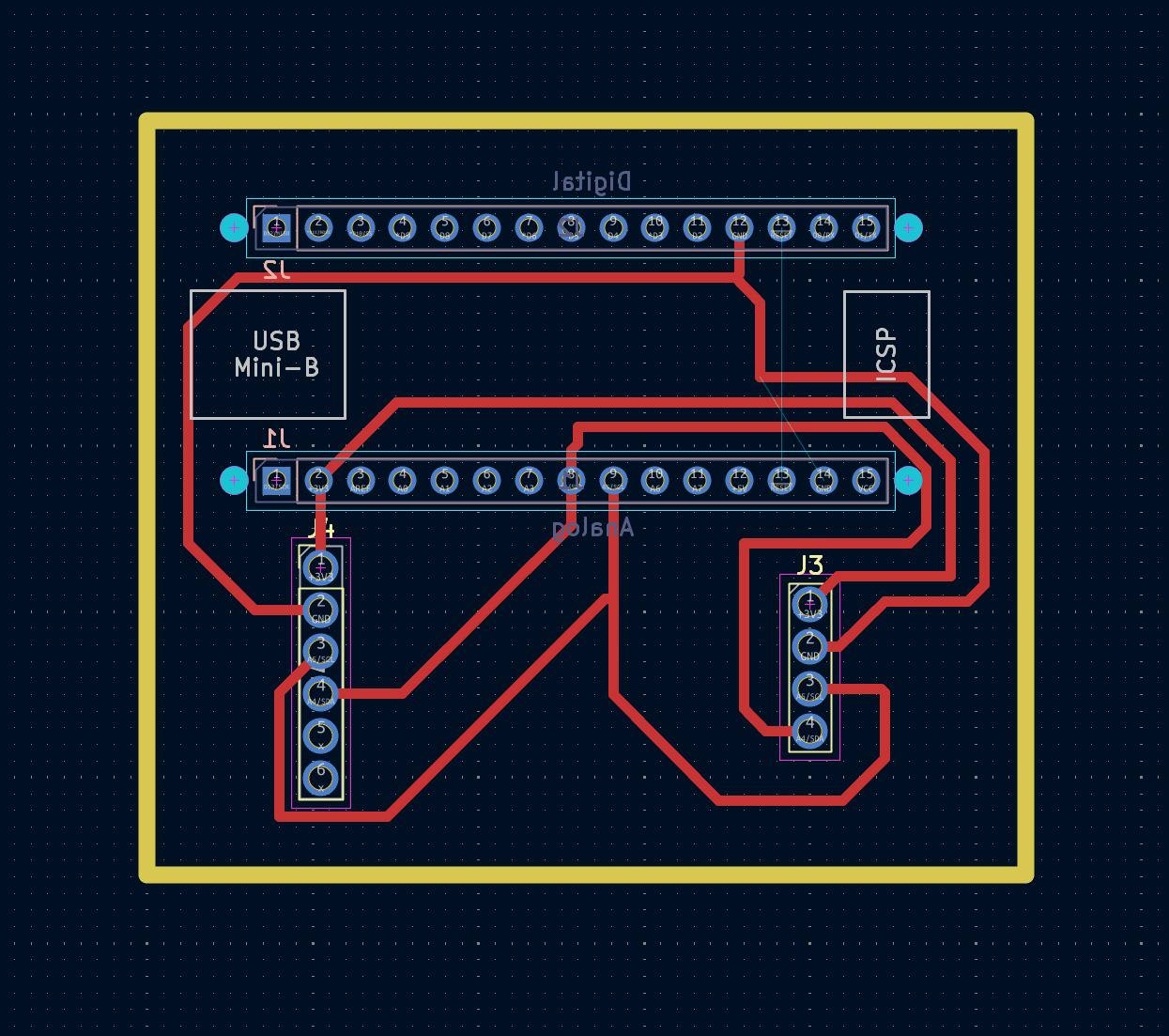
Electronics & PCB Design
Custom PCB design using KiCad, component soldering, and system integration testing.

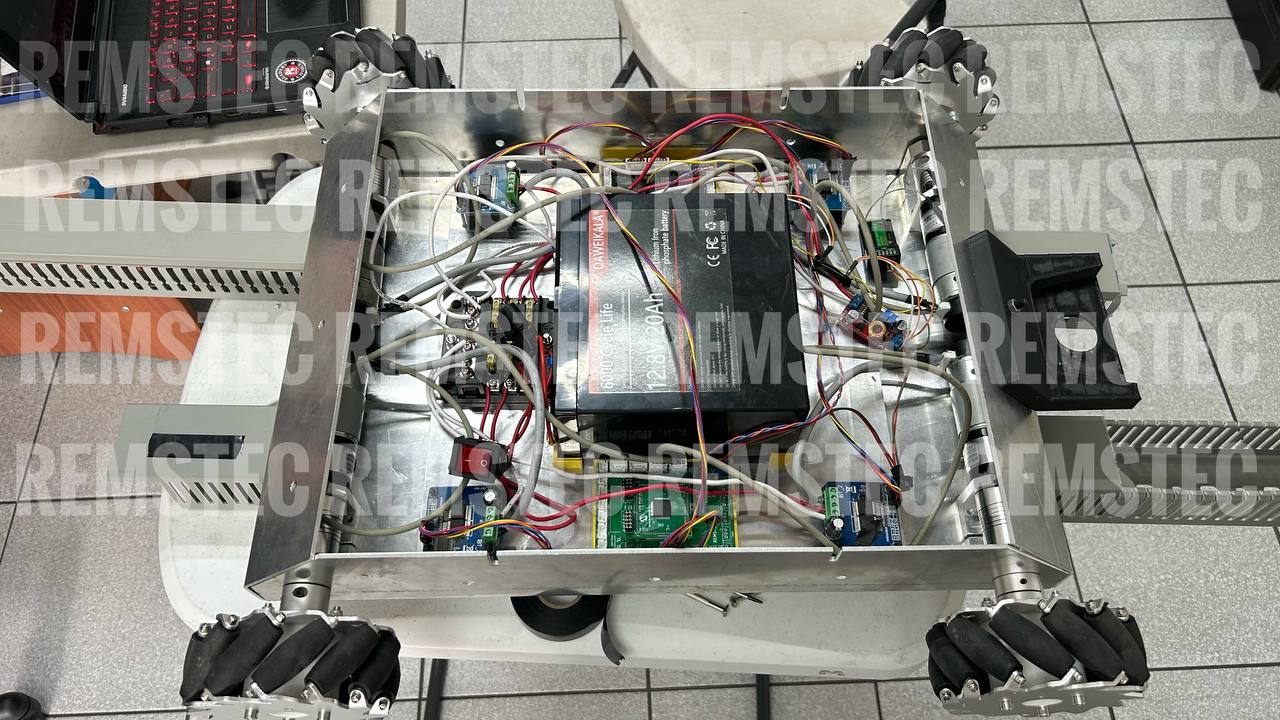
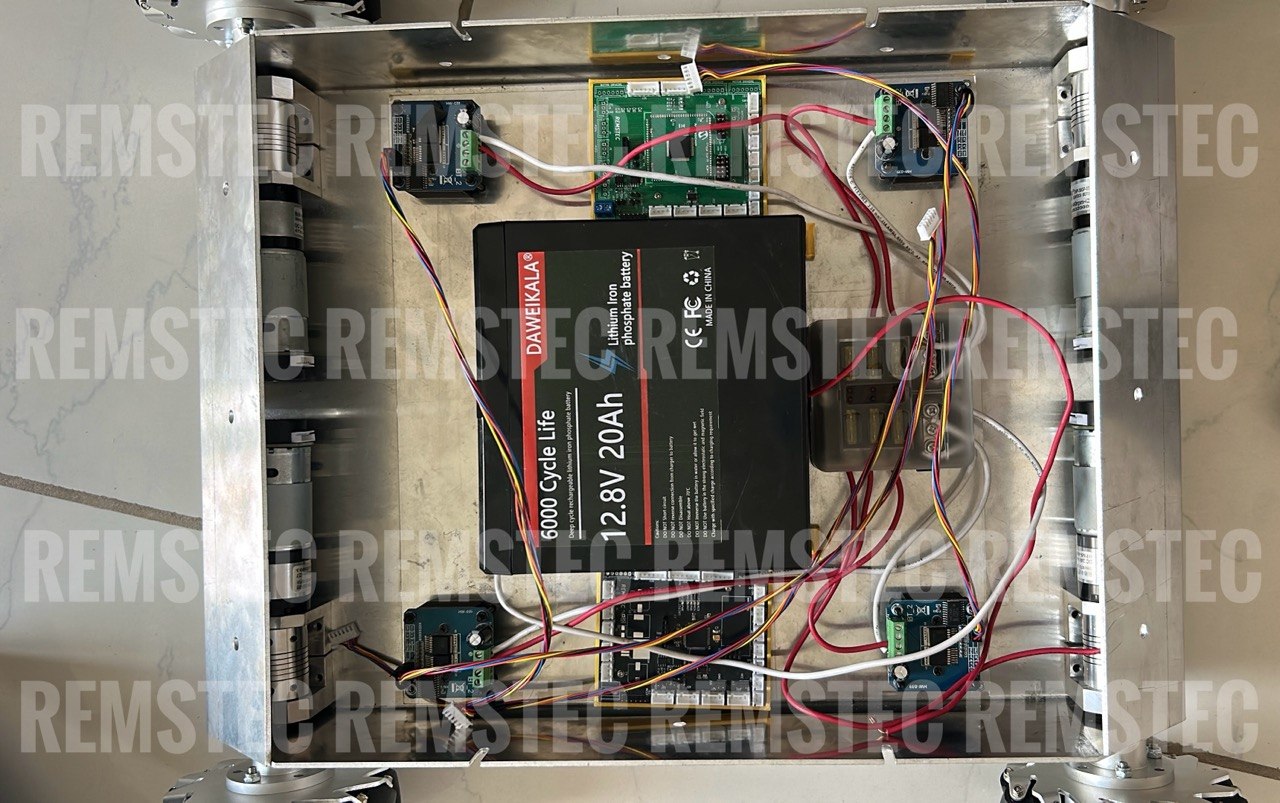
Components Used
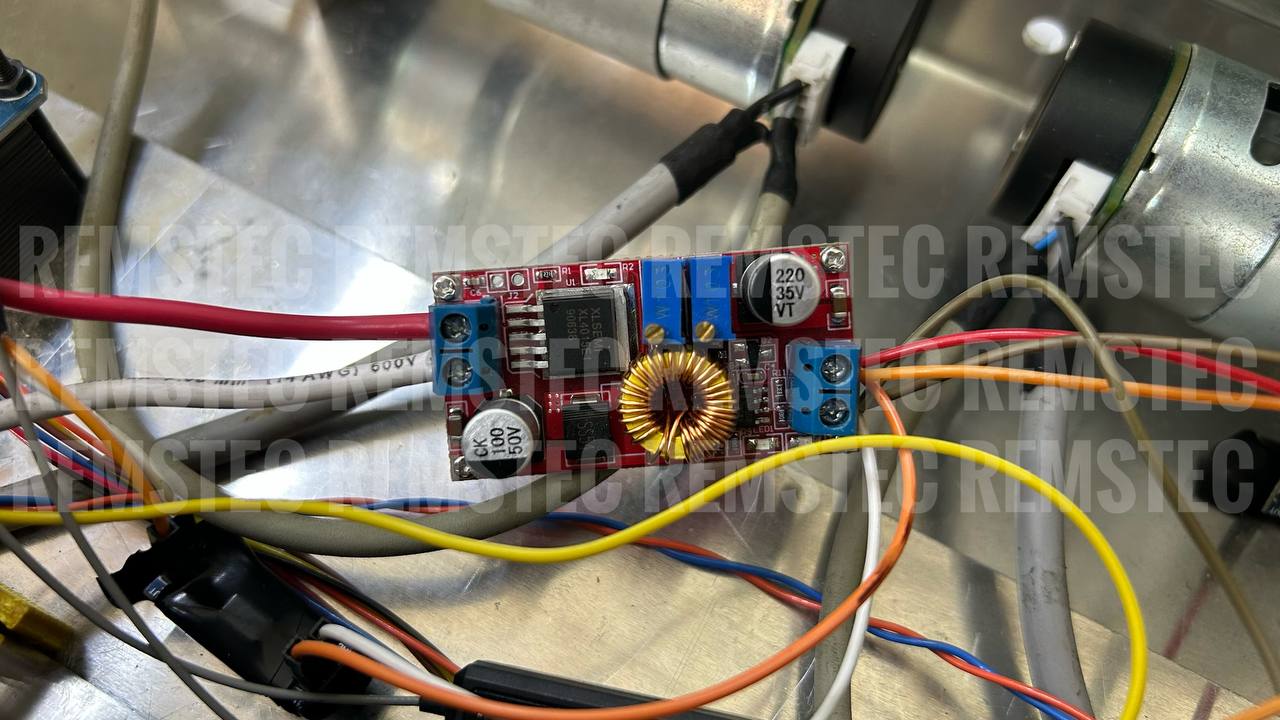
- 4 Motor drivers
- 4 Motors
- 2 PCBs custom-made in collaboration with the company
- Battery
- Fuse box
Implementation Timeline
Week 1-4: Prototyping
Testing the collection mechanism and initial chassis assembly using 3D printed parts.
Week 5-8: Electronics
Integration of Raspberry Pi Pico and motor drivers. Development of the AI vision script.
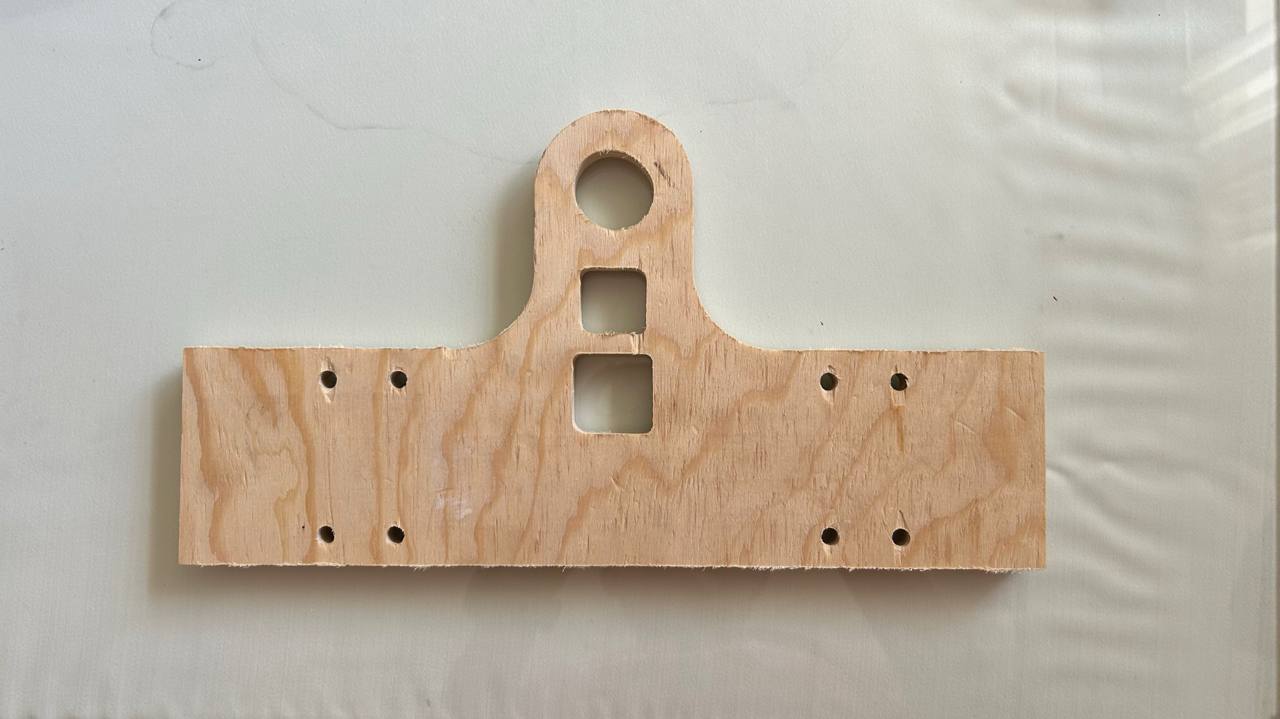
Week 9-12: Final Assembly
Final CNC cutting of the chassis and full-system testing in the field.
Resources & Materials
| MATERIAL | QUANTITY | UNIT COST (MXN) | TOTAL COST (MXN) |
|---|---|---|---|
| 18 mm Plywood Sheet (4x8 ft) | 1 | 750 | 750 |
| PLA 3D Printer Filament Spool (1 kg) | 1 | 350 | 350 |
| Expanded PVC Sheet (Sintra) | 1 | 400 | 400 |
| Lawn Mower Type Wheels | 2 | 180 | 360 |
| M8 Bolts with Nuts and Washers | 8 | 12 | 96 |
| 1/2-inch Bolt with 2 Nuts and 2 Washers | 1 | 25 | 25 |
| Expansion Anchor Bolts (Pijas de expansión) | 4 | 15 | 60 |
| 15 mm Pillow Block Bearings with mounting bolts (Chumaceras) | 2 | 130 | 260 |
| Bicycle Chain | 1 | 140 | 140 |
| Bicycle Chainring (Plato) | 1 | 180 | 180 |
| Set Screw (Prisionero) | 1 | 15 | 15 |
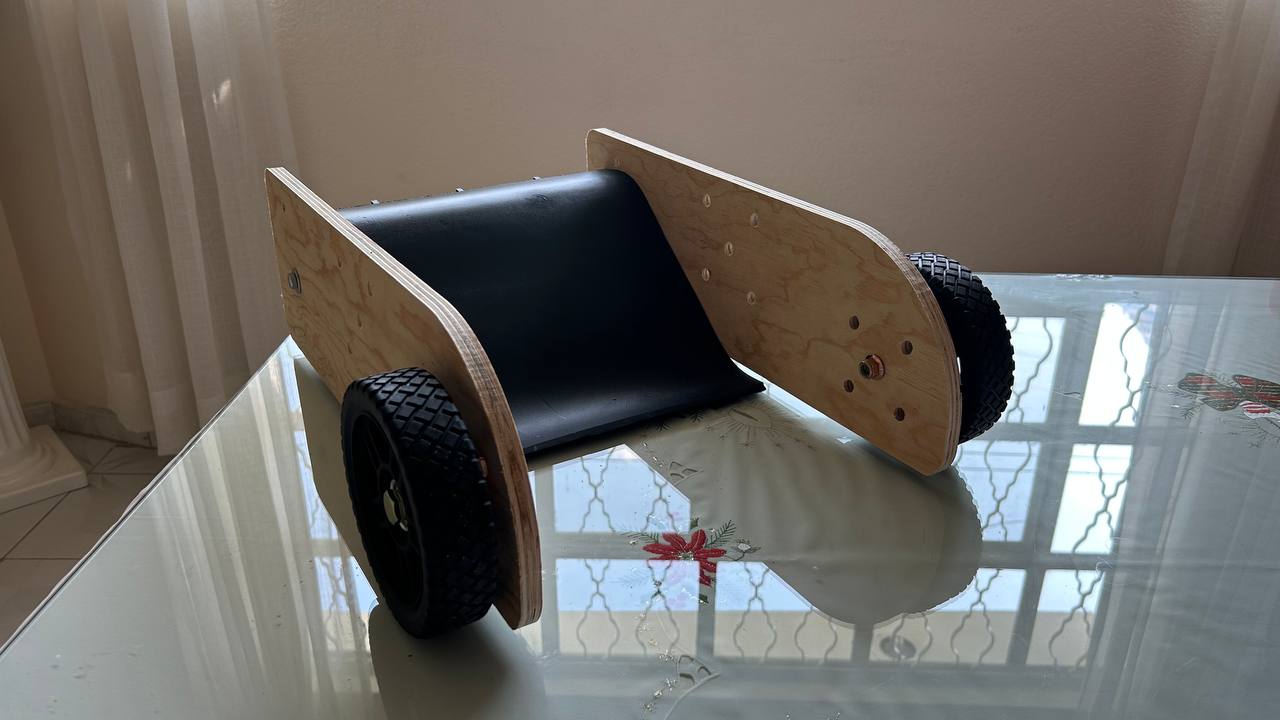
Final Assembly & Testing
Complete integration of all systems and field testing results.