Introduction
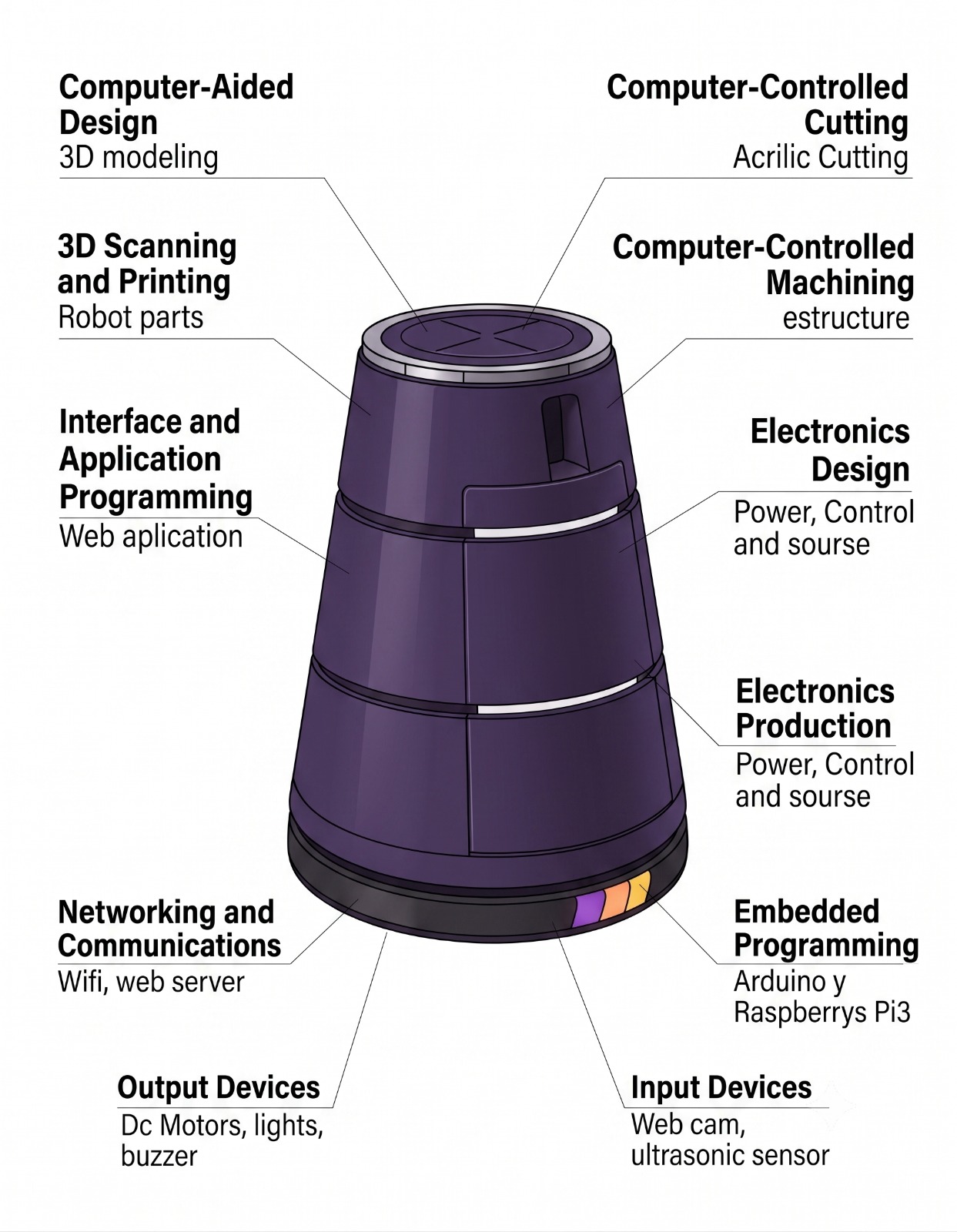
The objective of this project is to develop an autonomous mobile robot capable of assisting users through navigation, obstacle detection, environmental awareness, and remote monitoring. The robot integrates sensing, communication, embedded control, and web-based interfaces to create an intelligent and interactive platform. The system combines mechanical, electronic, and software components developed throughout Fab Academy.
System Architecture
Input Devices
The robot collects information from multiple sensors:
Processing Unit
The processing system consists of:
Communication
Communication between devices is achieved through:
Output Devices
The robot provides feedback through:
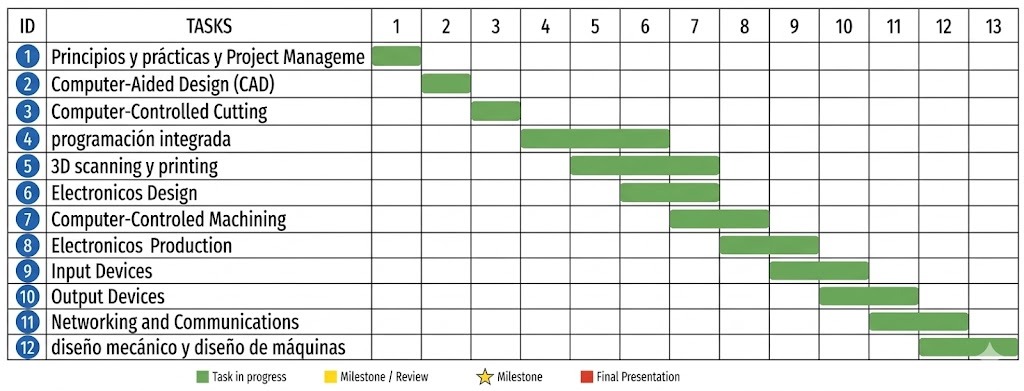
Current Progress
Completed
In Progress
Pending
Output Devices
The robot provides feedback through:
Conclusion
At the midterm stage, the project architecture has been defined and several subsystems have already been tested. The remaining work focuses on fabrication, integration, validation, and optimization of the autonomous robot platform.
← Main Page