WEEK 12: Mechanical Design
Assignment
Design a machine that includes mechanism+actuation+automation+application.
Build the mechanical parts and operate it manually.
Document the group project and your individual contribution
Sand Drawing Machine - Group Project
The Sand Drawing Machine is a creative automation project that combines mechanical engineering, electronics, and software automation to draw patterns and shapes on sand using servo motors and a magnet-based actuation system. The machine simulates a zen garden-style drawing system where a ball or stylus is moved across a flat sand surface to trace intricate designs.
Our project fulfills the criteria of mechanism, actuation, automation, and application
Actuation: Servo motors and a Hall effect sensor-based feedback system.
Automation: G-code generation and parsing for movement control.
Application: Artistic drawing, educational tool for CNC/G-code learning, stress-relief device.
This hardware setup enables smooth and accurate movement in both X and Y directions, forming the base for our automated drawing mechanism.
Hardware Screenshots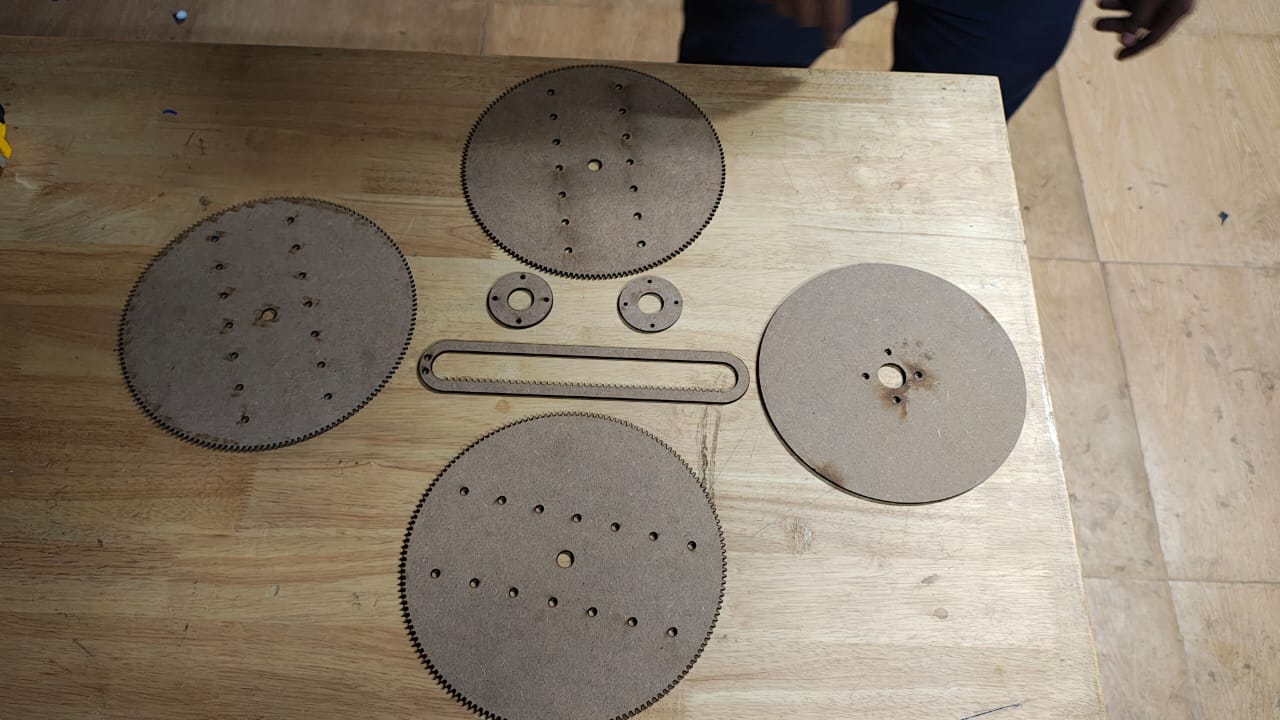
My Contribution: Electronics and Automation
I was responsible for the electronics, software, and automation aspects of the project.
Overview
The Sand Drawing Machine is a polar-coordinate CNC robot that creates intricate geometric patterns in sand
using a combination of:
-> Linear motion (radial arm movement)
-> Rotational motion (circular sweep)
-> Pen lift mechanism (servo-controlled)
Reference Link
ESP32-Powered Tabletop Kinetic Sand Drawing Robot Tabletop Sand Robot1.2 Key Features
2. Pattern Generation: Predefined shapes (circles, spirals, flowers).
3. Image-to-Gcode Conversion: Draw custom images.
4. Real-time Status Monitoring: Check machine state.
5. Emergency Stop & Homing: Safety and calibration functions.
Hardware Design
Componenets List| Component | Specifications | Purpose |
|---|---|---|
| ESP32 | Dual-core, Wi-Fi | Main controller |
| NEMA 17 Stepper (x2) | 1.8°/step, 12V | Linear & rotational motion |
| Servo Motor | 180° rotation and Linear rotation | Pen up/down mechanism |
| Hall Effect sensor | SS49E | Detect a reference (home) position |
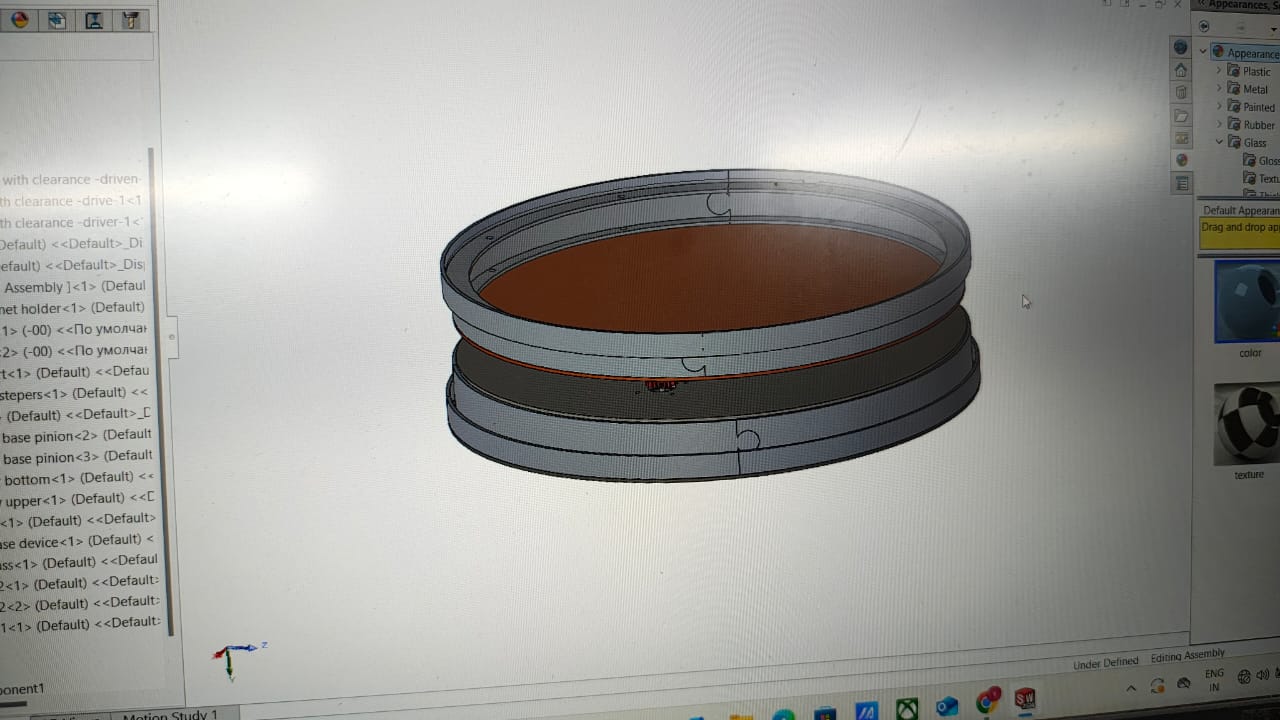
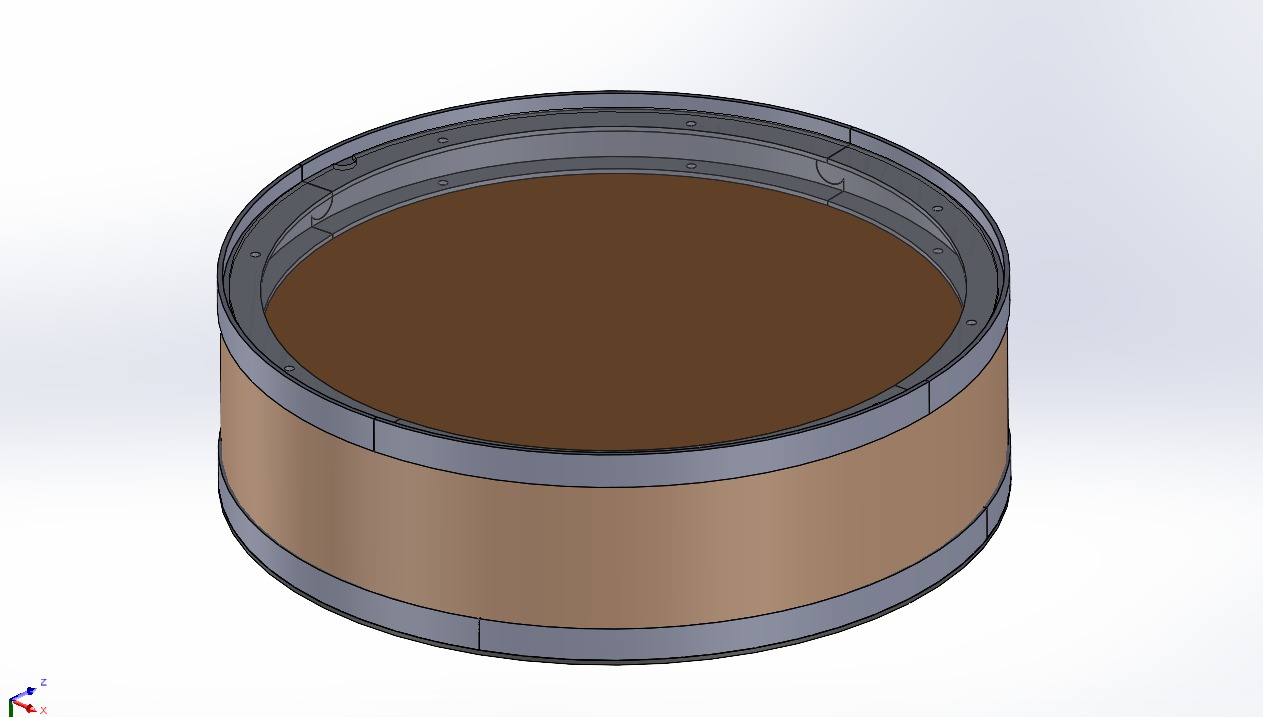
Mechanical Design
Polar Motion System
Rotational Axis: Stepper rotates the entire arm.
Linear Axis: Stepper moves the pen radially.
Pen Mechanism:
Servo lifts/lowers the drawing tool.
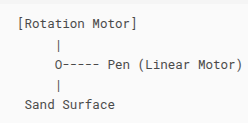
Conceptual Diagram: Polar Coordinate Robot Arm
Firmware (ESP32 Code)
Key Features
-> Wi-Fi Access Point (AP) Mode: Hosts a web server for remote control.
-> G-code Interpreter: Parses commands (G0, G1, M3, M5, G28).
-> Stepper Motor Control: Uses AccelStepper for smooth motion.
-> Homing Routine: Uses endstops to find zero position.
Algorithm
1. Initialization:
-> Start Wi-Fi AP (ssid: iTN-FORGE/s, password: ForgeXForged).
-> Configure steppers (STEPS_PER_MM = 80, STEPS_PER_DEG = 200/360).
-> Attach servo (PEN_UP_ANGLE = 90, PEN_DOWN_ANGLE = 0).
2. G-code Processing:
-> G0/G1 (Linear Move):
Converts X (angle) and Y (radius) to stepper steps.
Moves motors asynchronously (stepper.run() in loop()).
-> M3/M5 (Pen Control):
M3 -> Pen down (servo.write(0)).
M5 -> Pen up (servo.write(90)).
-> G28 (Homing):
Moves motors backward until endstops trigger (digitalRead(HOME_PIN)).
Web Server Endpoints:
| Endpoint | Description |
|---|---|
| /upload | Receives G-code |
| /status | Returns machine state (ready/busy/homing) |
| /home | Triggers homing |
| /stop | Emergency stop |
| /clear | Clears G-code buffer |
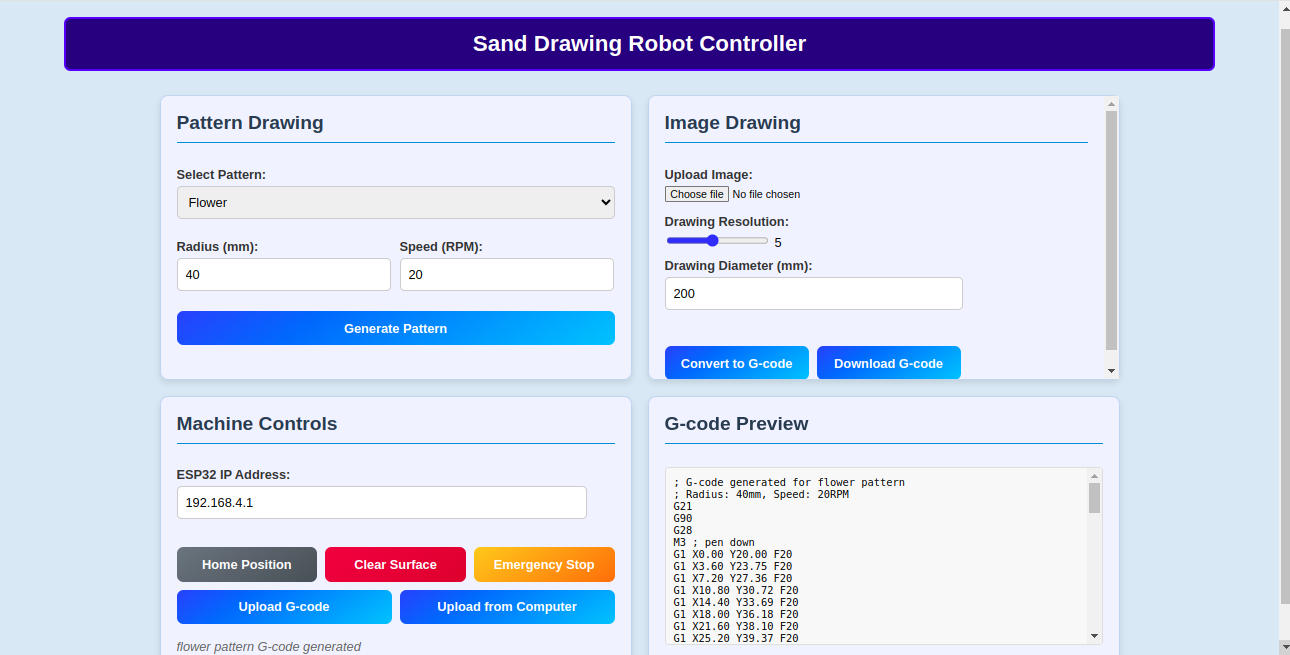
Web Interface
Key Features -> Pattern Generation: Circle, Spiral, Flower.
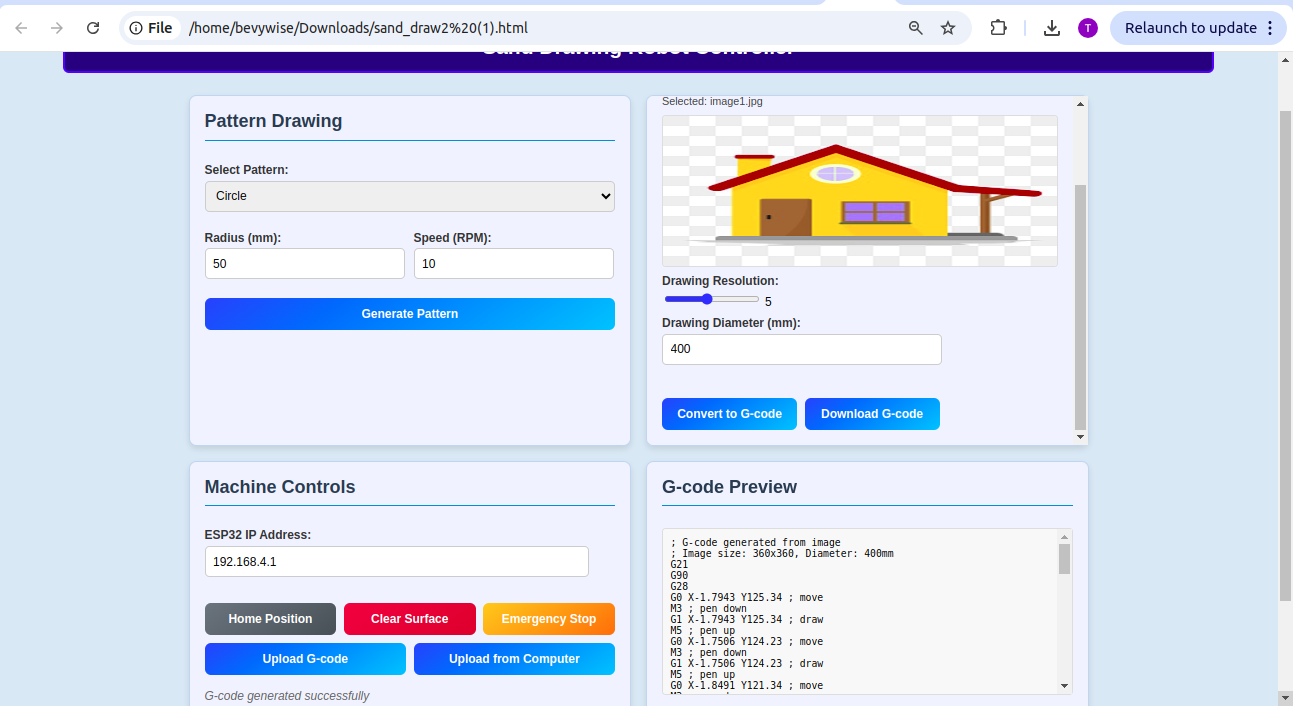
-> Image-to-G-code Conversion: Processes uploaded images.
-> Real-time Status: Checks ESP32 connection.
-> G-code Preview & Download.
Algorithm
Pattern Generation
Circle{
const angle = (i / 100) * 2 * Math.PI;
gcode += `G1 X${angle} Y${radius}\n`;
}
Sprial
{
const r = (i / 100) * radius;
gcode += `G1 X${angle} Y${r}\n`;
angle += 0.1;
}
Image Processing
-> Converts image pixels to polar coordinates.
-> Dark pixels - Pen down movements.
-> Sorts points by angle for continuous drawing.
ESP32 Communication
Fetch API for sending G-code
method: 'POST',
body: gcode,br> });
Status Polling (every 3 sec)
.then(res => res.text())
.then(status => updateUI(status));
Controls
Stop: fetch(/stop, {method: 'POST'})
Clear: fetch(/clear, {method: 'POST'})
WorkFlow Summary
1. User uploads image/selects pattern.
2. Web UI converts it to G-code.
3. G-code sent to ESP32 via /upload.
4. ESP32 parses and executes movements.
5. Real-time status updates in UI.
Troubleshooting
| Issue | Solution |
|---|---|
| ESP32 not reachable | Check Wi-Fi AP, CORS headers |
| Motors not moving | Verify stepper wiring & power |
| G-code upload fails | Increase fetch timeout, check server logs |
| Pen not lifting | Calibrate servo angles |
Conclusion
This system allows automated sand art creation with
-> ESP32 for motor control.
-> Web UI for easy pattern design.
-> Polar coordinate G-code for smooth drawing.
Hero shots
Webpage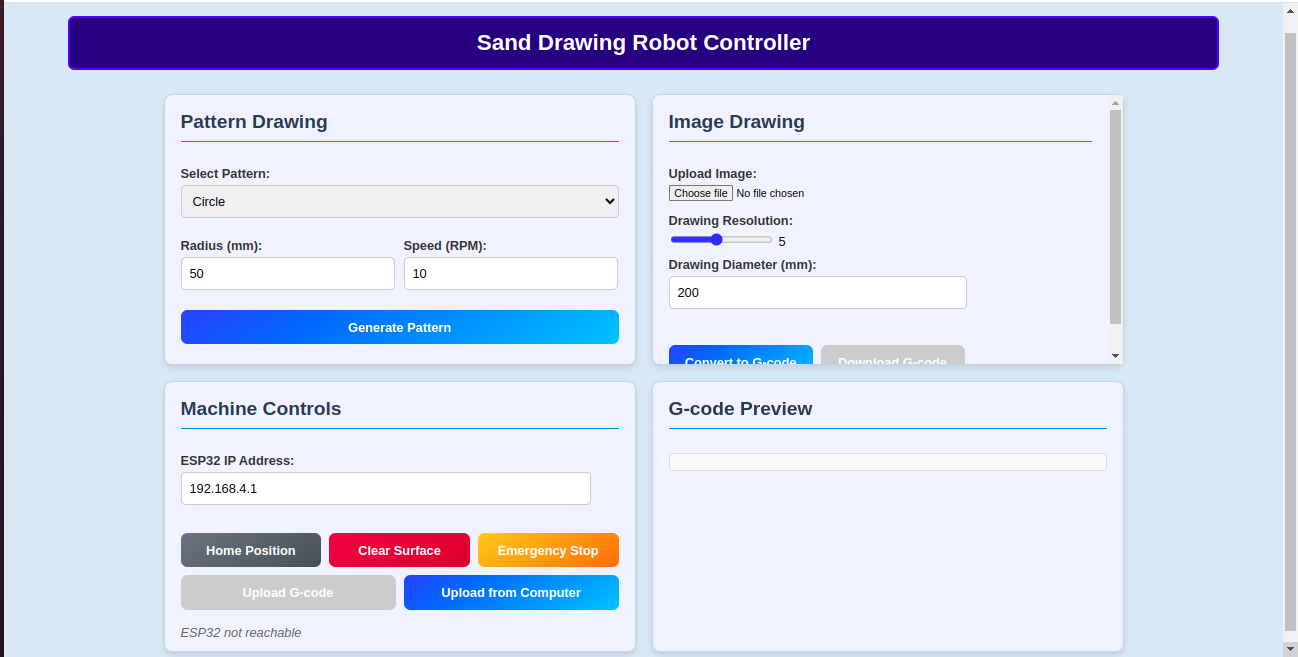
Download Original Design Files
Click on the links below to download the Program: