Week 11 : Embedded Networking and Communications
Objective of this Week
- To establish communication between two projects and exchange data messages.
Adafruit
- Adafruit Industries is a U.S.-based open-source hardware company founded by Limor “Ladyada” Fried in 2005.
- It designs, manufactures, and sells electronics components, tools, and kits for makers, students, and engineers.
- Adafruit is known for its beginner-friendly products and detailed online tutorials.
- It offers a wide range of development boards like Feather, Trinket, and Metro (Arduino-compatible).
- The company also supports IoT projects through Adafruit IO, a cloud platform for data logging and device control.
- Its product catalog includes sensors, LEDs, displays, motor drivers, and microcontrollers.
- Adafruit encourages open-source learning by providing free code libraries and schematics.
- It has a strong online community and learning portal called the Adafruit Learning System.
- The company promotes STEM education through hands-on electronics projects.
- Overall, Adafruit empowers innovators to prototype, learn, and build creative electronic systems easily.
Overview
For this task, we developed an Adafruit IO-based servo control system, where one device (sender) transmits data to the cloud, and another (receiver) reads that data to perform an action. This fulfilled the goal of sending a message between two networked projects.
Project Description
- The experiment demonstrates real-time cloud-to-device communication using XIAO ESP32-C3 and Adafruit IO.
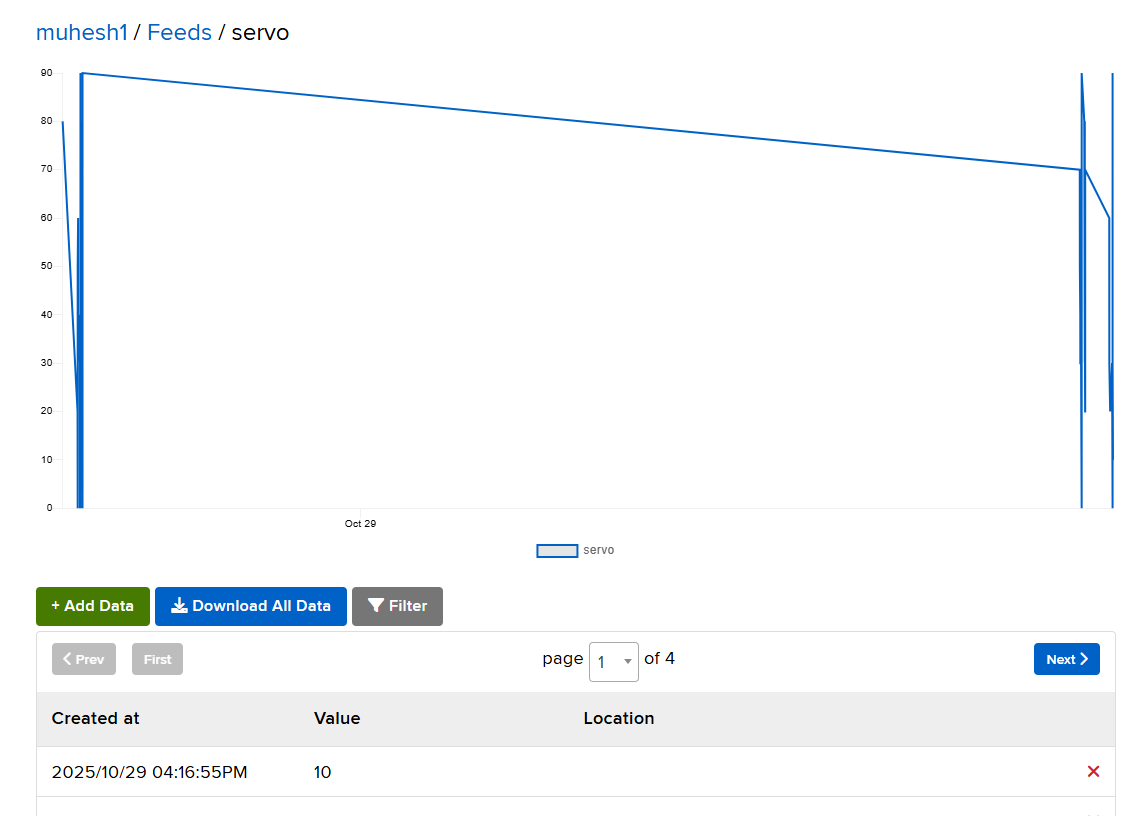
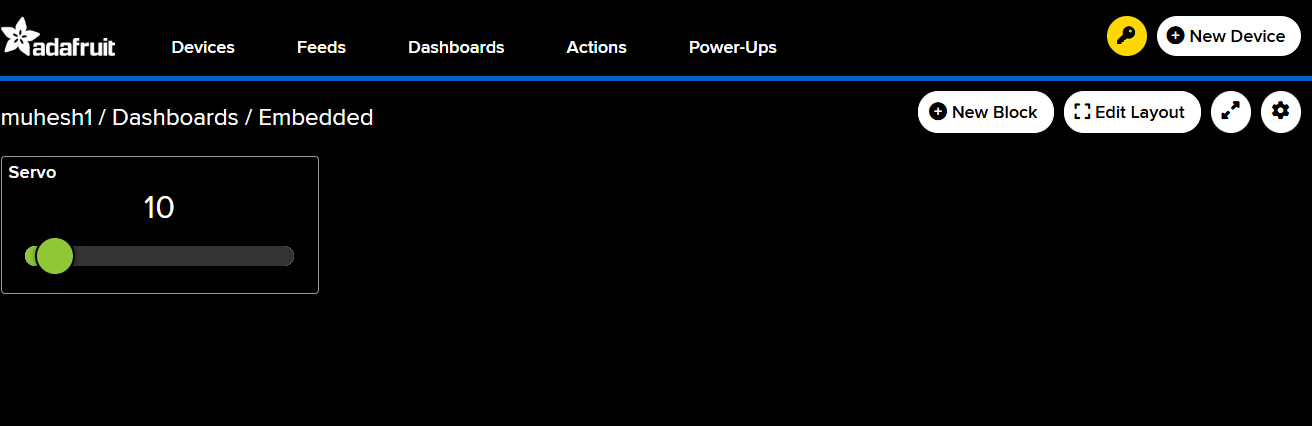
- A slider widget on the Adafruit IO dashboard acts as the sender, transmitting angle values through a cloud feed named “servo”.
- The ESP32-C3 microcontroller, as the receiver, subscribes to this feed and moves a servo motor to the specified position.
Thus, the message sent between the two projects is the servo angle value , transmitted via the internet using MQTT protocol.
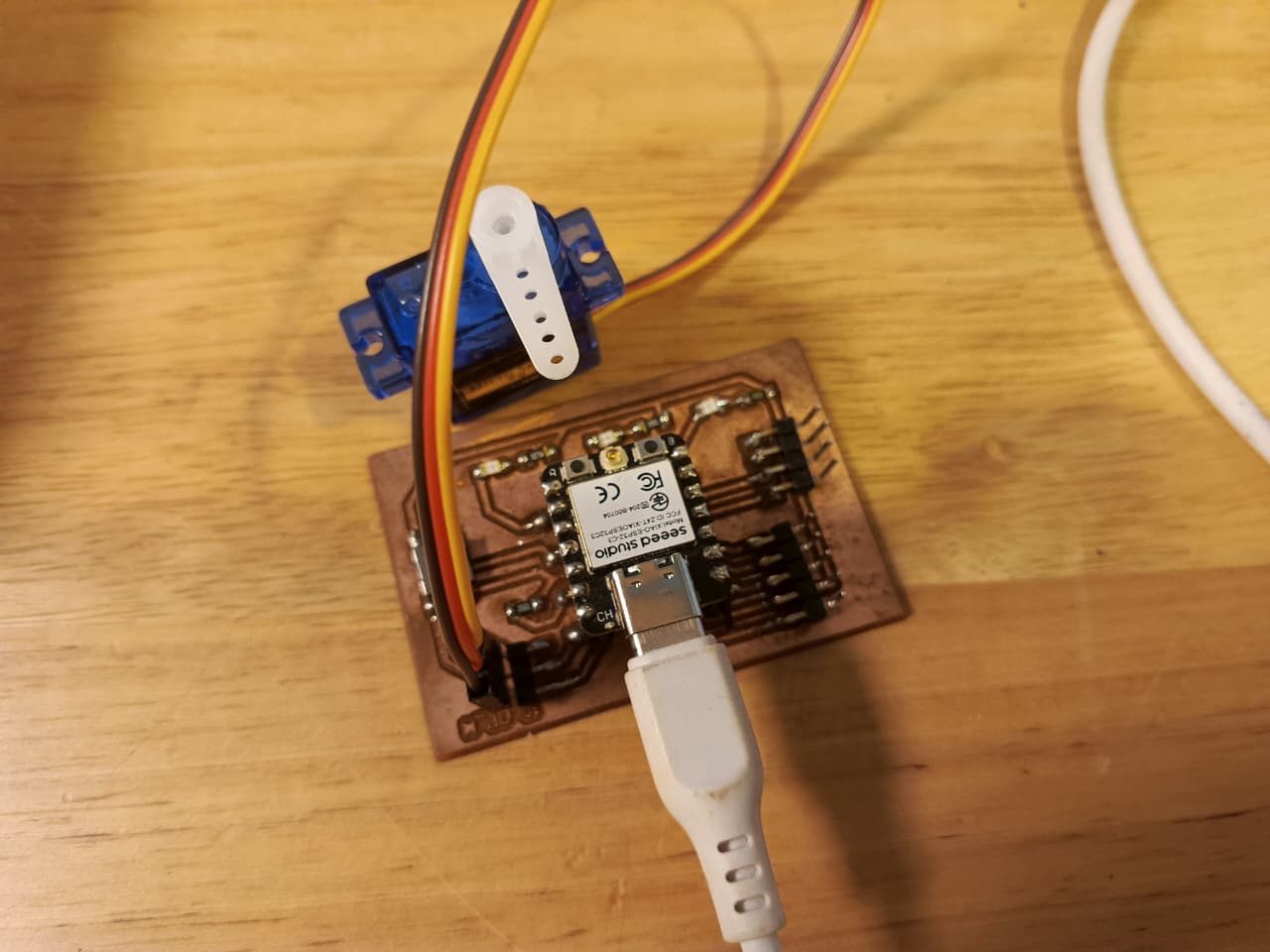
Components Used
- XIAO ESP32-C3
- Servo Motor (SG90)
- USB Type-C Cable
- Adafruit IO Account
- PCB fabricated board
Dashboard Setup on Adafruit IO
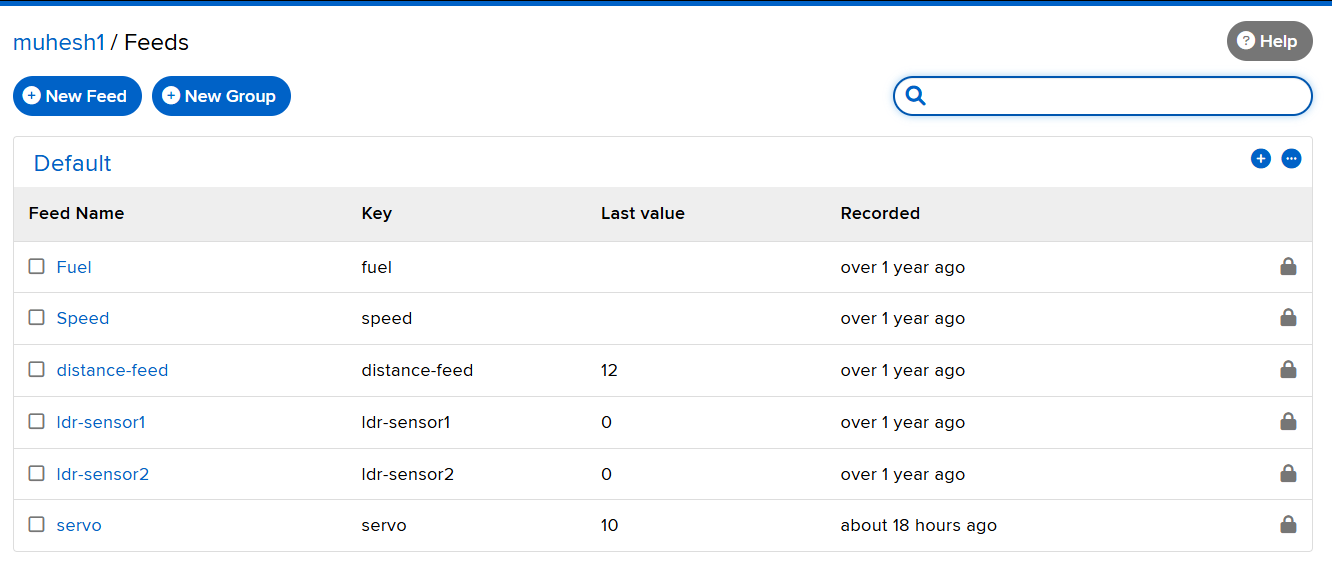
- Log in to https://io.adafruit.com
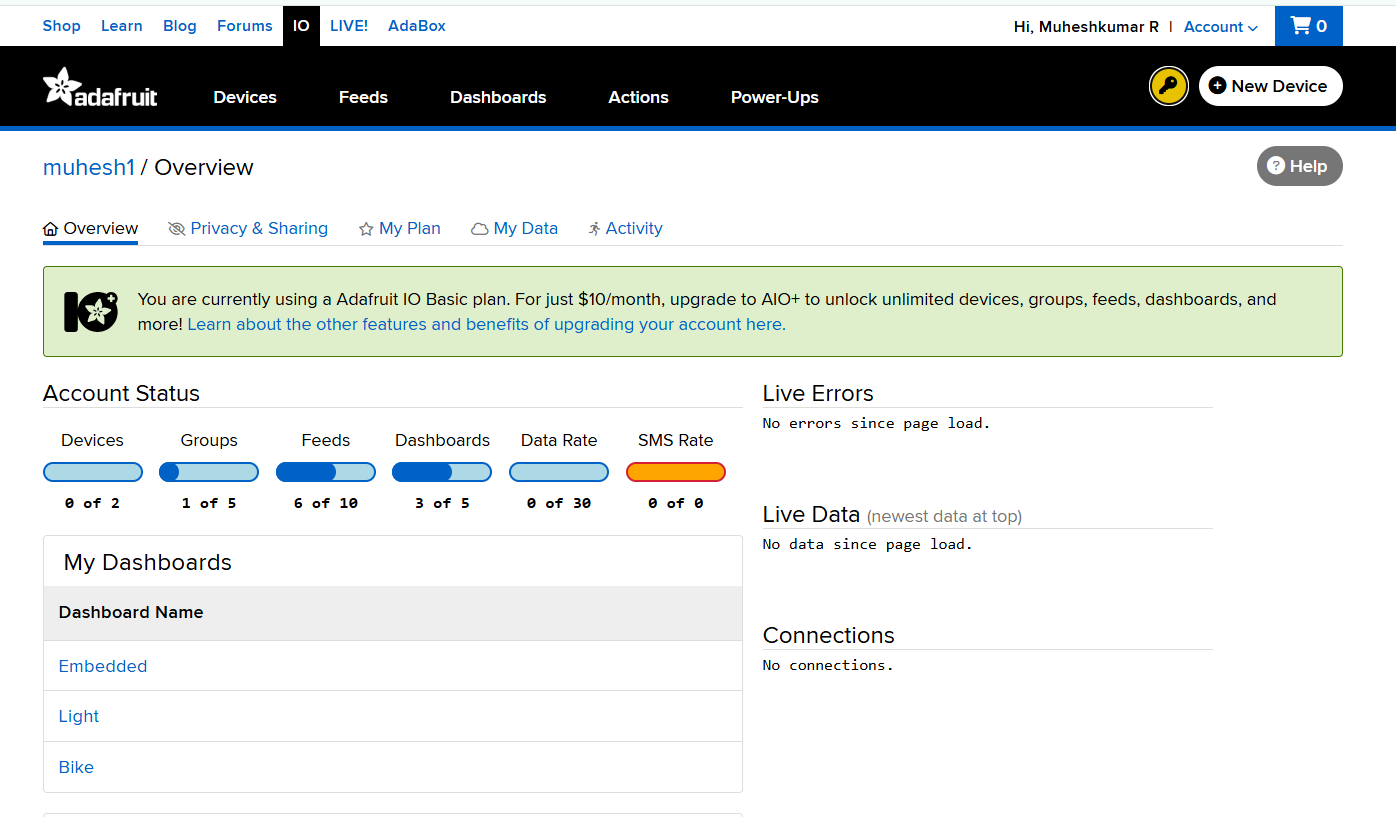
- Navigate to Feeds → New Feed → Name it “servo”
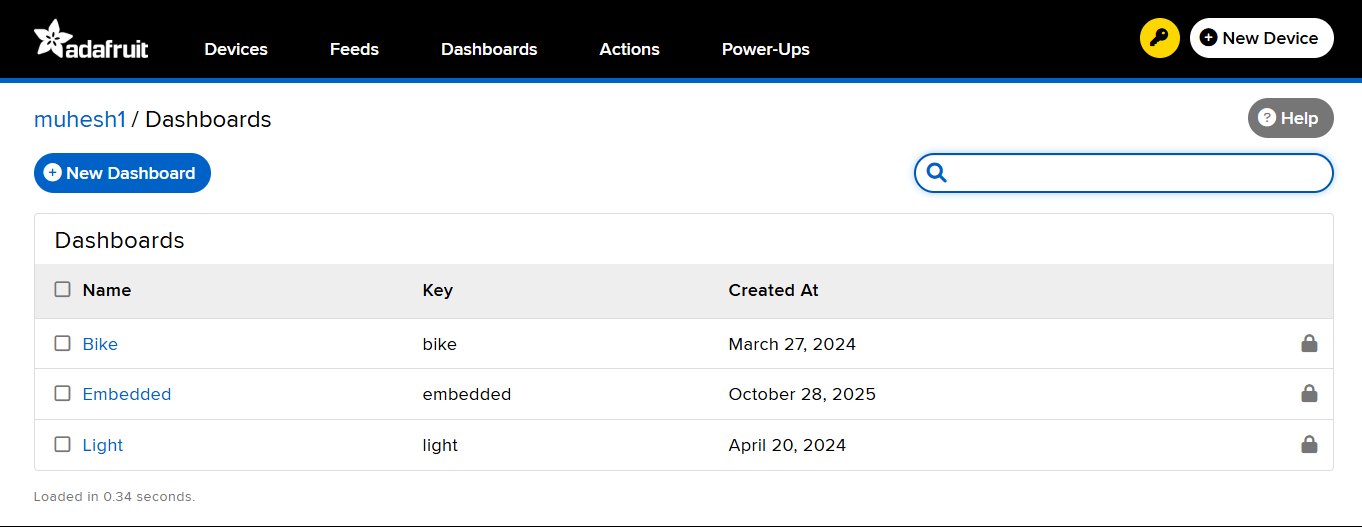
- Go to Dashboards → Create New Dashboard named “Embedded” → Add a Slider Block
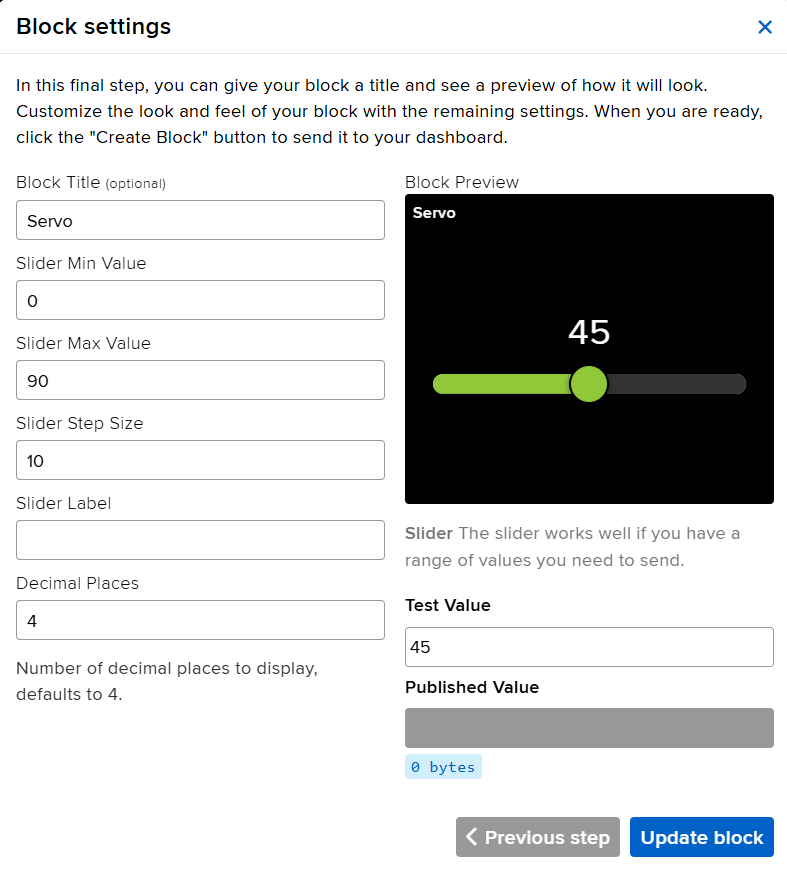
- Configure the slider:
- Feed: servo
- Range: 0 to 180
- Send Value on Change: Enabled
This dashboard now acts as a virtual transmitter, sending data values to the subscribed xiao seed studio ESP32-C3 board.
Arduino Code
#include <WiFi.h>
#include "AdafruitIO_WiFi.h"
#include <ESP32Servo.h>
// Adafruit IO Credentials
#define IO_USERNAME "muhesh1"
#define IO_KEY "aio_FxIC98S56I4KYL6JE7wJM38j0rXV"
// Wi-Fi Credentials
#define WIFI_SSID "Forge_office"
#define WIFI_PASS "Forged@Forge"
// Create Adafruit IO instance
AdafruitIO_WiFi io(IO_USERNAME, IO_KEY, WIFI_SSID, WIFI_PASS);
// Define servo feed
AdafruitIO_Feed *servoFeed = io.feed("servo");
// Servo configuration
Servo myServo;
int servoPin = 6; // GPIO6 on XIAO ESP32-C3
void setup() {
Serial.begin(115200);
myServo.attach(servoPin);
Serial.print("Connecting to Adafruit IO");
io.connect();
servoFeed->onMessage(handleServo);
while (io.status() < AIO_CONNECTED) {
Serial.print(".");
delay(500);
}
Serial.println("\nConnected to Adafruit IO!");
}
void loop() {
io.run(); // Keep the connection alive
}
void handleServo(AdafruitIO_Data *data) {
int angle = data->toInt();
Serial.print("Received Servo Angle: ");
Serial.println(angle);
angle = constrain(angle, 0, 180);
myServo.write(angle);
}
System Operation
- The ESP32-C3 connects to Wi-Fi and authenticates with Adafruit IO.
- The Adafruit IO slider publishes a new value to the “servo” feed.
- The subscribed ESP32-C3 receives this message instantly.
- The servo motor rotates to match the received angle.
- The serial monitor logs the received messages, confirming successful communication.
Working video
Conclusion
Through this task, I achieved real-time servo control using an Adafruit IO cloud feed, fulfilling the requirement of sending a message between two projects. This experiment illustrates how embedded networking enables remote device control, data sharing, and system integration across cloud-based platforms — an essential component of modern IoT engineering.