Background
The project I plan to develop is a pest scouting device. In agriculture pests can be a serious constraint to crop productivity and one problem is the overuse of control measures these being chemical or biological. One way to reduce their use is to scout to count the number of pests of a species and then apply a control measure if a certain number of insect is surpassed. This is usually done by the monitoring of traps. A commonly used trap is a yellow card that is covered with an adhesive. Pest scouting is done by visiting at certain time intervals these cards and counting the number of pest in the card to later estimate the pest population and decided if there is a need for its control. Also these cards can be used to learn when a particular pest is present. The activities in pest scouting include:
- ID and count number of pest in the cards,
- Tabulate number of pests in the growing area,
- Change cards whenever necessary as they age or get dirty.

Problem at hand
Pest scouting can be labor intensive and expensive. In addition depending on the frequency of inspection, the lag between pest establishment and discovery can be quite long which might be conducive to loss in crop productivity.
Device Proposed
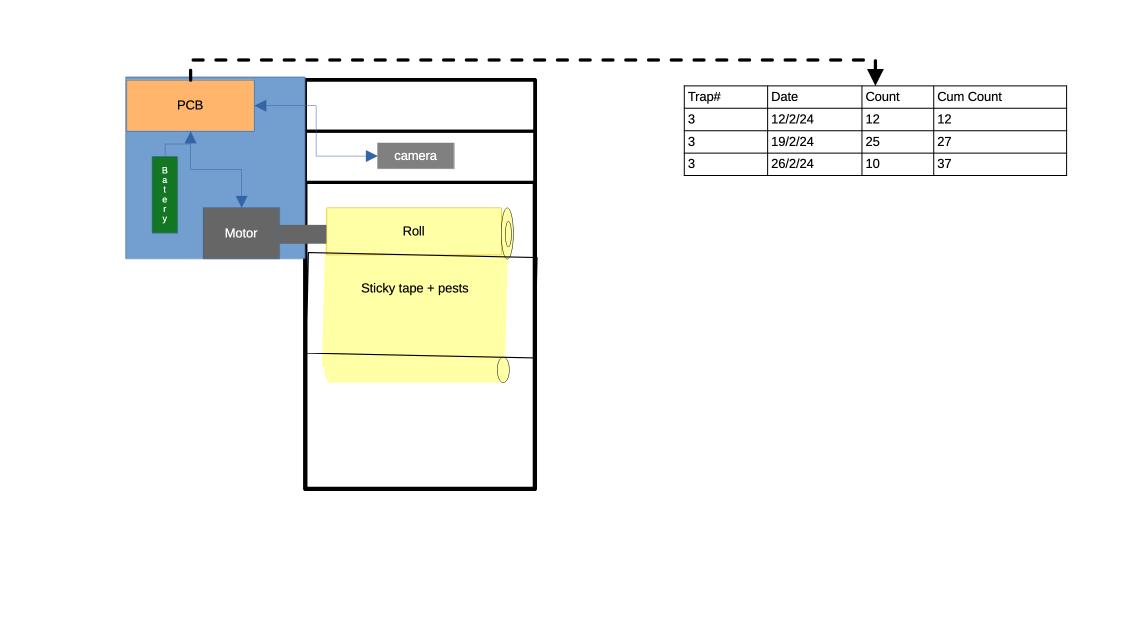
In order to reduce labor and to monitor pest on real time I propose to integrate a camera, a computer vision detection algorithm, and create an electronic device that unroll and re rolls sticky trap tape.

 ### Functioning
### Functioning
Time Counter a => Picture => Local Storage => Preprocessing
(needed?) => Pest detection => # of pests => transmission =>
calculate stats.
Time Counter b => Unroll re-roll
Here I explain a bit about the functioning of the device that I would like to develop (see scheme above). First we would program a micro controller counter to turn on a camera at specific intervals to take picture of the surface of the sticky tape. This camera should have a lens to allow macro photography as it will be close to the tape possible it would need auto focus in order to account for small irregularities in the distance from the tape to the trap. Once the picture hos been taken it is likely that some image prepossessing will be needed, specifically rectify the image so the insects retain their proper shape, some sort of orthorectification. Once the image is rectified an image algorithm will be used to detect the individual insects and classify them. Once the number of insects is tabulated at instance t a vector with the number of insects and data will be sent to a computer. Inside the computer a graph of the number of insects will be built. Given that a threshold i.e. number of insects per trap is surpassed a recommendation to take action may be given according to a specific crop as these thresholds are crop specific. Also the microcontroller will be programmed to change activate a motor to change the sticky tape with the help of a motor at specific time intervals.
Some components
- Cilinders and lids for tape
- Motor
- Case rolls
- Case electronics
- PCB? + Wifi
- Camera => what resolution
- Gears?
- Battery(ies)
- keep adding…
Things to consider or solve
- Mechanics
- Size of sticky trap roll will have an impact on the motor and material needed.
- Possibly will have to look for a roll of tape that has glue on one side only.
- How to maintain the roll tape flat in the trapping area.
- Small macro camera focus depth?
- lens fogging.
- Waterproofing.
- Stable foot.
- How to make the roof where the camera is located sturdy
- removable cover for batteries and tape.
- debree and pests could impact re-rolling and size of the roll.
- keep adding…
- Informatics
- Image pre-processing ?
- Wifi transmission
- keep adding…
Similar Projects in the FabAcademy
While looking at the Fab Academy documentation today(27.01.2025) I discovered that there was a student (Amal Saidani) in 2020 who had develop a intelligent pest trap.
https://fabacademy.org/2020/labs/kamplintfort/students/amal-saidani/assignments/week20/
Summary:
Is a box that has some holes in the walls. Inside the wall you can see a pheromone impregnated object to attract moths. There is a camera inside the box. It would seem that the camera is guarded and extended or retracted if a picture is needed, my guess is to protect the camera from insect scales? Also the camera is used by a phone app.
Differences:
- In this design the camera is mobile in mine is not.
- There is no insect counting.
- The sticky traps is housed in walls mine will be exposed.
Cool points from this design:
I think the idea of camera protection is important in order to avoid having to clean the camera often. I think we could look at the electronics of how the camera and sensor are operated.
Similar Projects in Academia
Near Infra read sensors
Summary:
The sensor illuminates an air volume and records the backscattered light from insects that fly through the measurement volume. Discrete insect observations are automatically extracted from the continuous raw data flow and transmitted over a cellular connection to a database in the cloud… features such as the wingbeat frequency, body-wing ratio, and melanisation factor are computed and used to predict the insect classification down to species.(Rydhmer et al. 2022)
Link: https://www.nature.com/articles/s41598-022-06439-6
Differences:
This is completely different to what I am proposing as it uses near infra red to infer insect counts and classification.
Cool points from this design:
My guess is that detection is not affected by environmental light conditions as it would be in object detection.
Similar Projects in Industry
Here you can see a device constructed by a company:
Summary
Their device uses is a camera that is pointed into a extended arm that holds a sticky card. The image is processed by object detection algorithm. There is also a solar panel that recharges the batteries.
Differences:
They have a solar panel which I have not in mine. The sticky card is away from the body and held by an arm while in mine is meant to be a part of the main body. The other difference is that they have one sticky card that needs to be changed manually and I proposed a roll of tape. The position of the camera is also different.
Cool points from this design:
Powered by solar energy. The design seems stylish as well. Other cool solutions from the same company https://www.pats-drones.com
References
Rydhmer, K., Bick, E., Still, L. et al. Automating insect monitoring using unsupervised near-infrared sensors. Sci Rep 12, 2603 (2022). https://doi.org/10.1038/s41598-022-06439-6