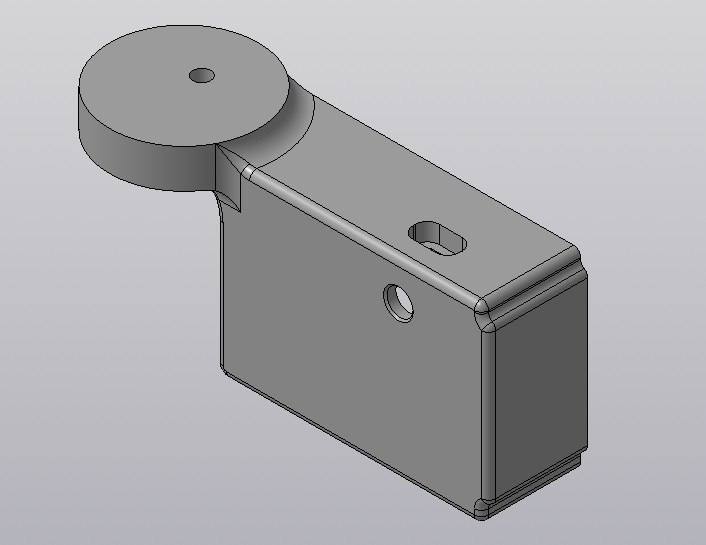
To put the pieces of my project together, I started with the laser pointer mount. I found it at this link.

As a result, I used only one of the three elements - a mount for two servos between themselves. I printed it on a 3D printer
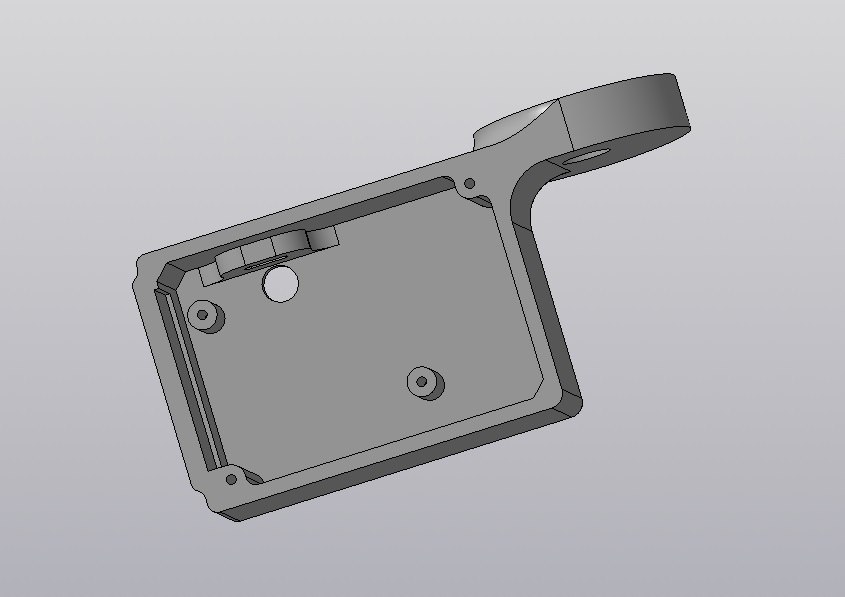
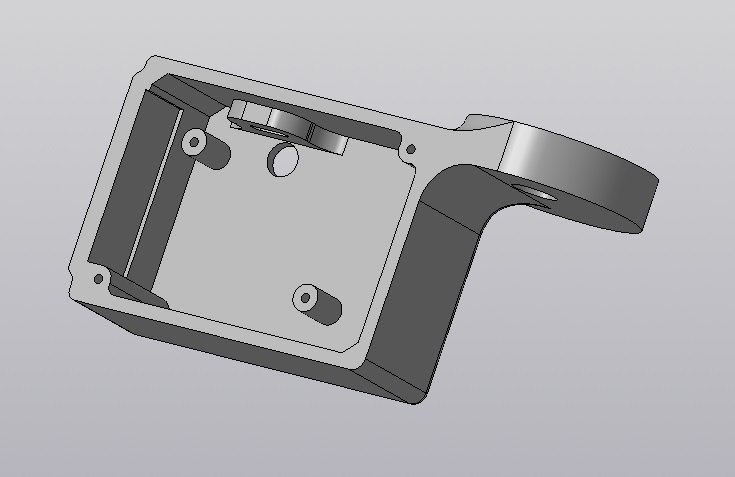
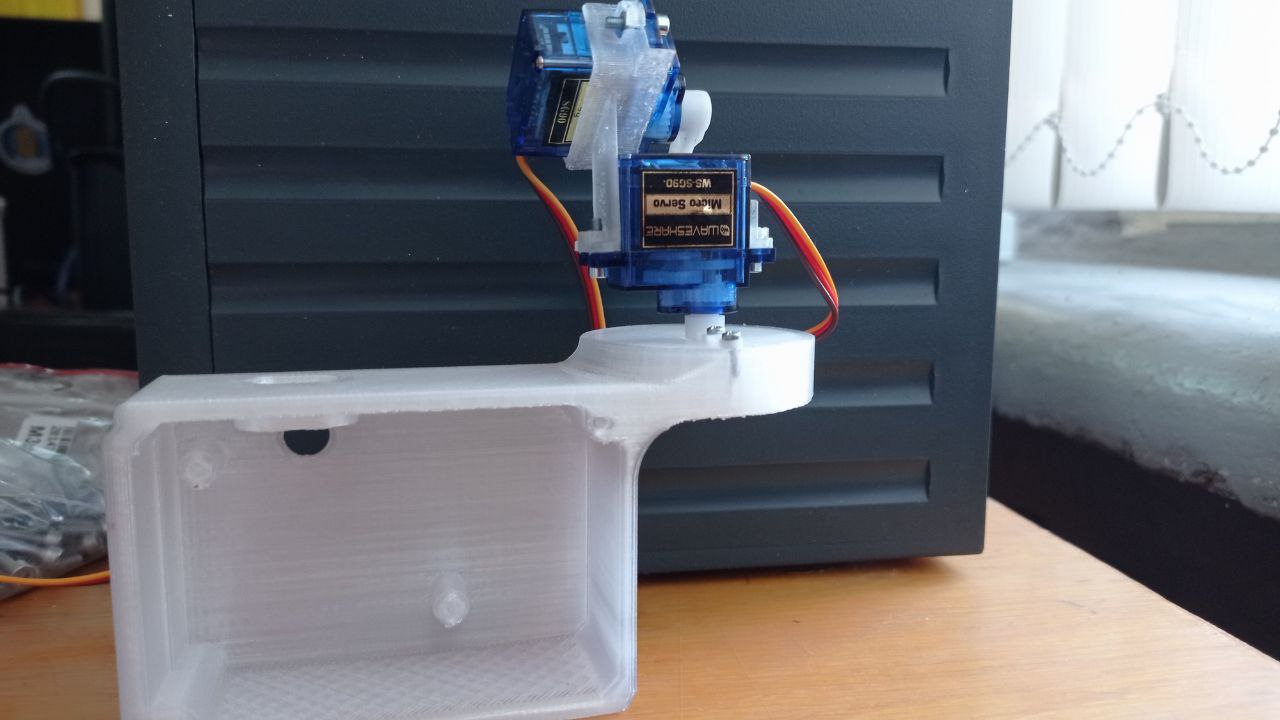
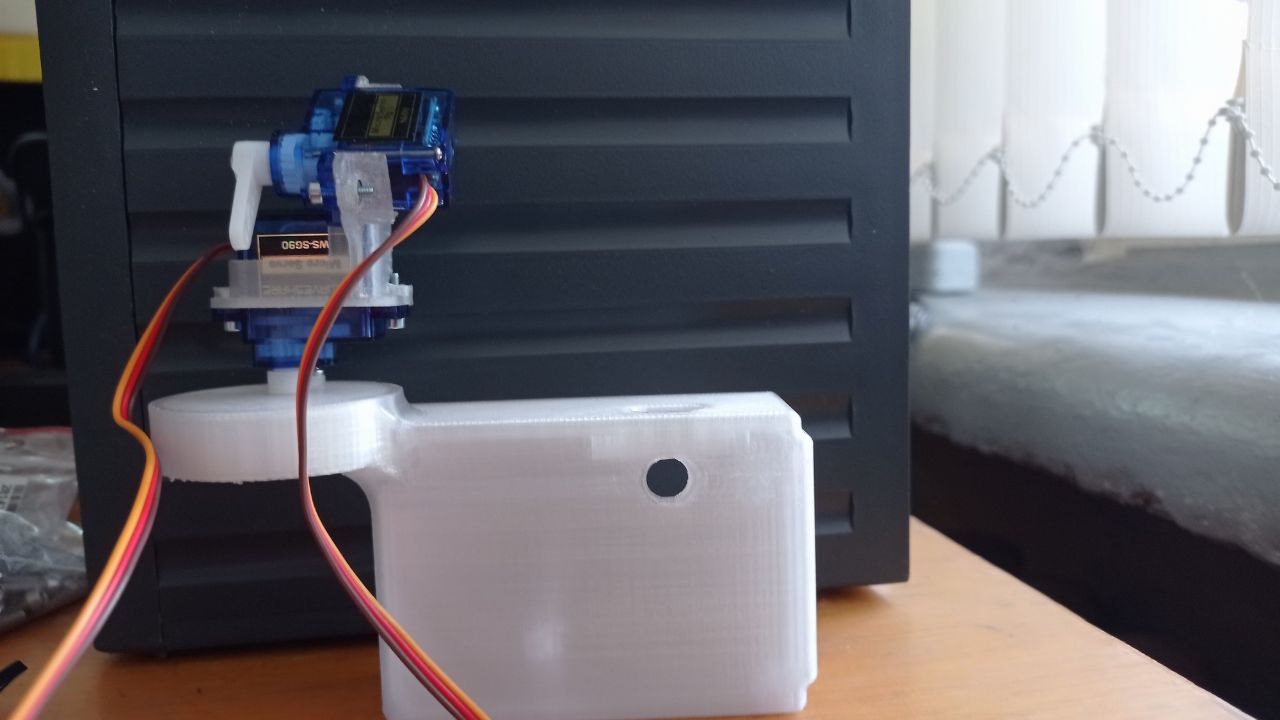
The next task was to design the case. I also decided to make its main part with the help of 3D printing. Together with it, I also designed a stand for the servo.
the case also provided mounting for the board, holes for the camera and Type-C input and for wires.
I fixed the wires from the servo and the laser with the help of thermal insulators.
The back panel was designed and cut with a carbon fiber router. I found out later that it is dangerous for health. But it turned out to be a very good cover.
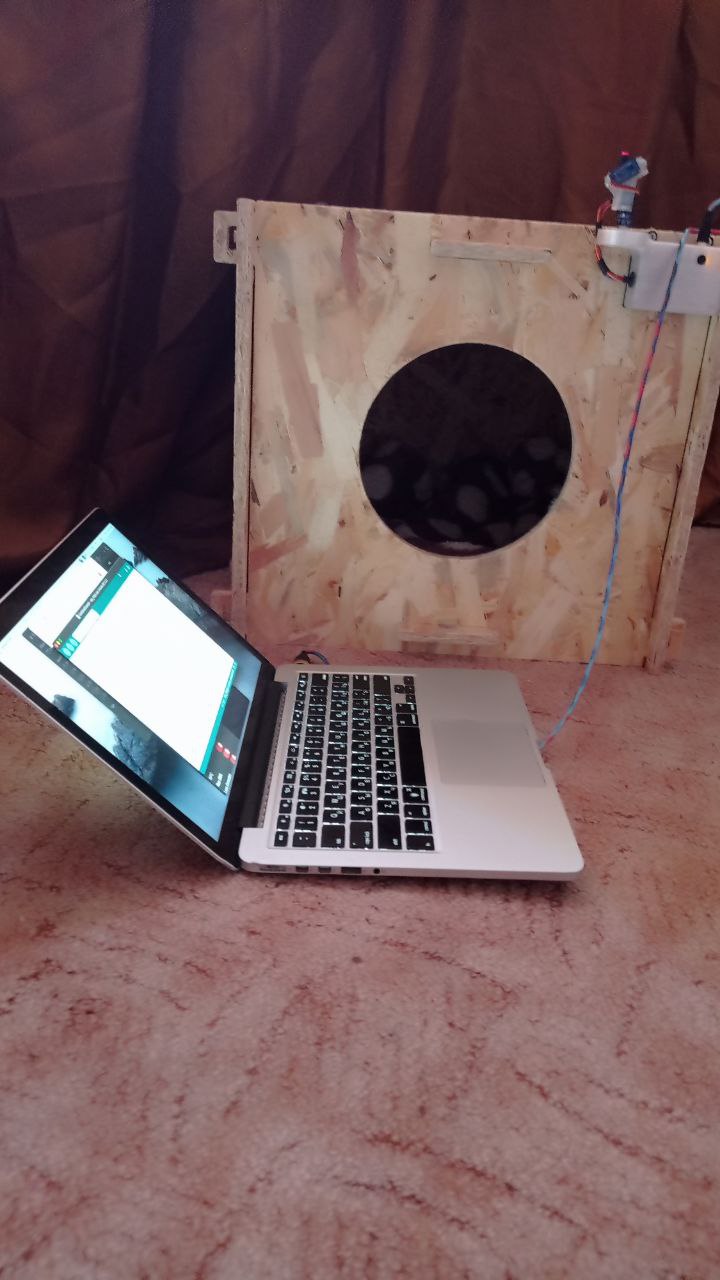
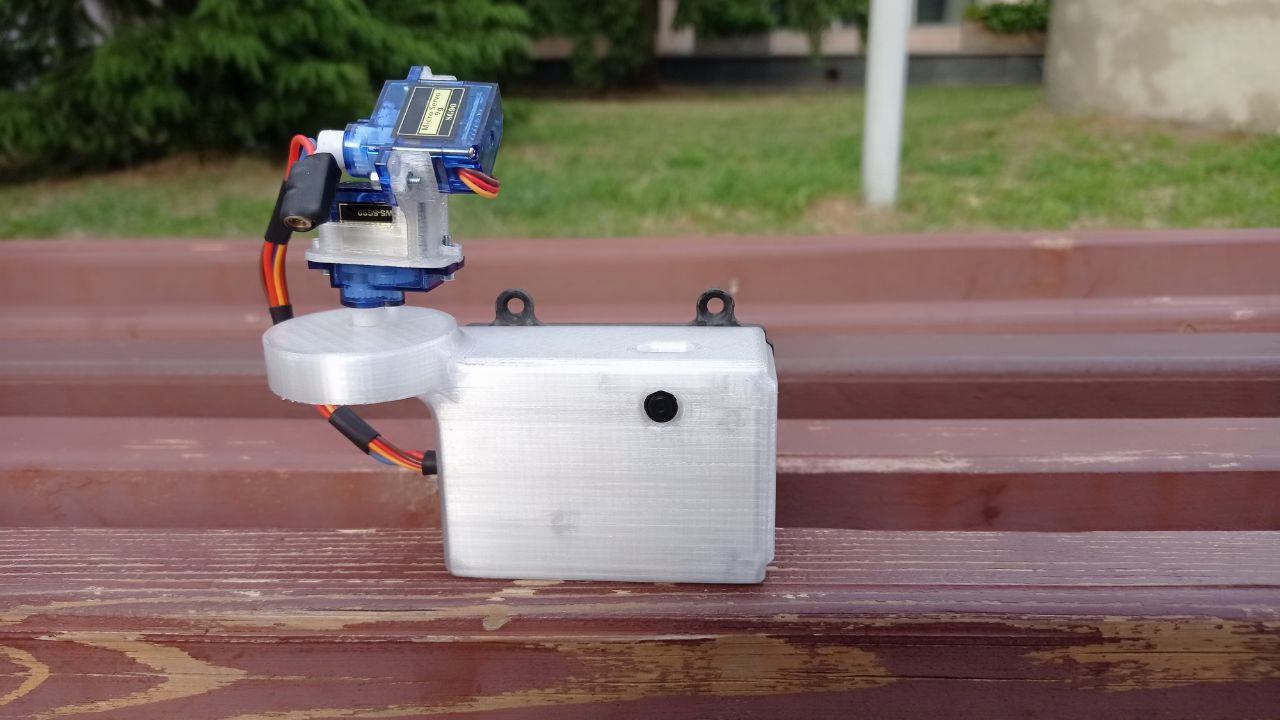
Finally, the electronics are assembled in the case

The last step is fixing the device on the cat's house.

then I tested whether everything works
the final result of assembly and integration