Machine Design
Assignment
As team rwanda we are suposed to design and emplimante the machine with mechanisim and actuation ,automation even appliaction
there we go for machine building

Individual assignment
Table of Content
- fandamental concept behind the machine ,mechanism , actuation and the term automation(my contribution-Assigniment)
- Design of robotic arm specificary in robot dynamic and robot kinematic and its actuation (Individual contribution work)
- design laser cutter machine cariage for longitudunal and transversal mechanism of machine (individual contribution work)
- Testing machine part for the progres (Group-Assigniment)
background of machine and mechanisM , actuation even automation with the help of books
MACHINE AND MACHANISM THEORY
- Mechanics: It is that branch of scientific analysis which deals with motion, time and force.
- Kinematics is the study of motion, without considering the forces which produce that motion. Kinematics of machines deals with the study of the relative motion of machine parts. It involves the study of position, displacement, velocity and acceleration of machine parts.
- Dynamics of machines involves the study of forces acting on the machine parts and the motions resulting from these forces.
- Plane motion: A body has plane motion, if all its points move in planes which are parallel to some reference plane. A body with plane motion will have only three degrees of freedom. I.e., linear along two axes parallel to the reference plane and rotational/angular about the axis perpendicular to the reference plane. (eg. linear along X and Z and rotational about Y.)The reference plane is called plane of motion. Plane motion can be of three types. (1) Translation (2) rotation and (3) combination of translation and rotation.
- Kinematic link (or) element A machine part or a component of a mechanism is called a kinematic link or simply a link
- Types of link
(a) Based on number of elements of link:
Binary link: Link which is connected to other links at two points. (Fig.1.3 a)
Ternary link: Link which is connected to other links at three points. (Fig.1.3 b)
Quaternary link: Link which is connected to other links at four points. (Fig1.3 c)

- Machine: A machine is a mechanism or collection of mechanisms, which transmit force from the source of power to the resistance to be overcome. Though all machines are mechanisms, all mechanisms are not machines. Many instruments are mechanisms but are not machines, because they do no useful work nor do they transform energy.
MY Contribution
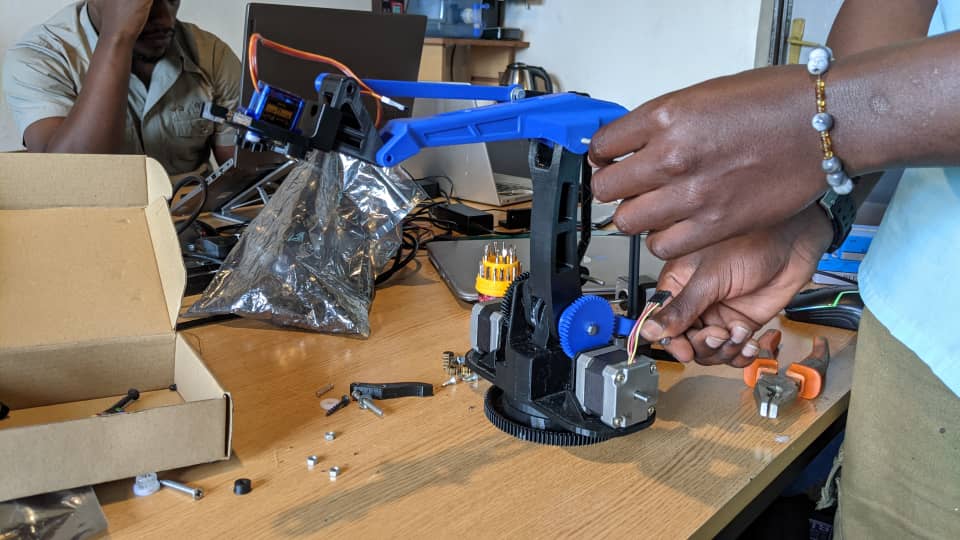
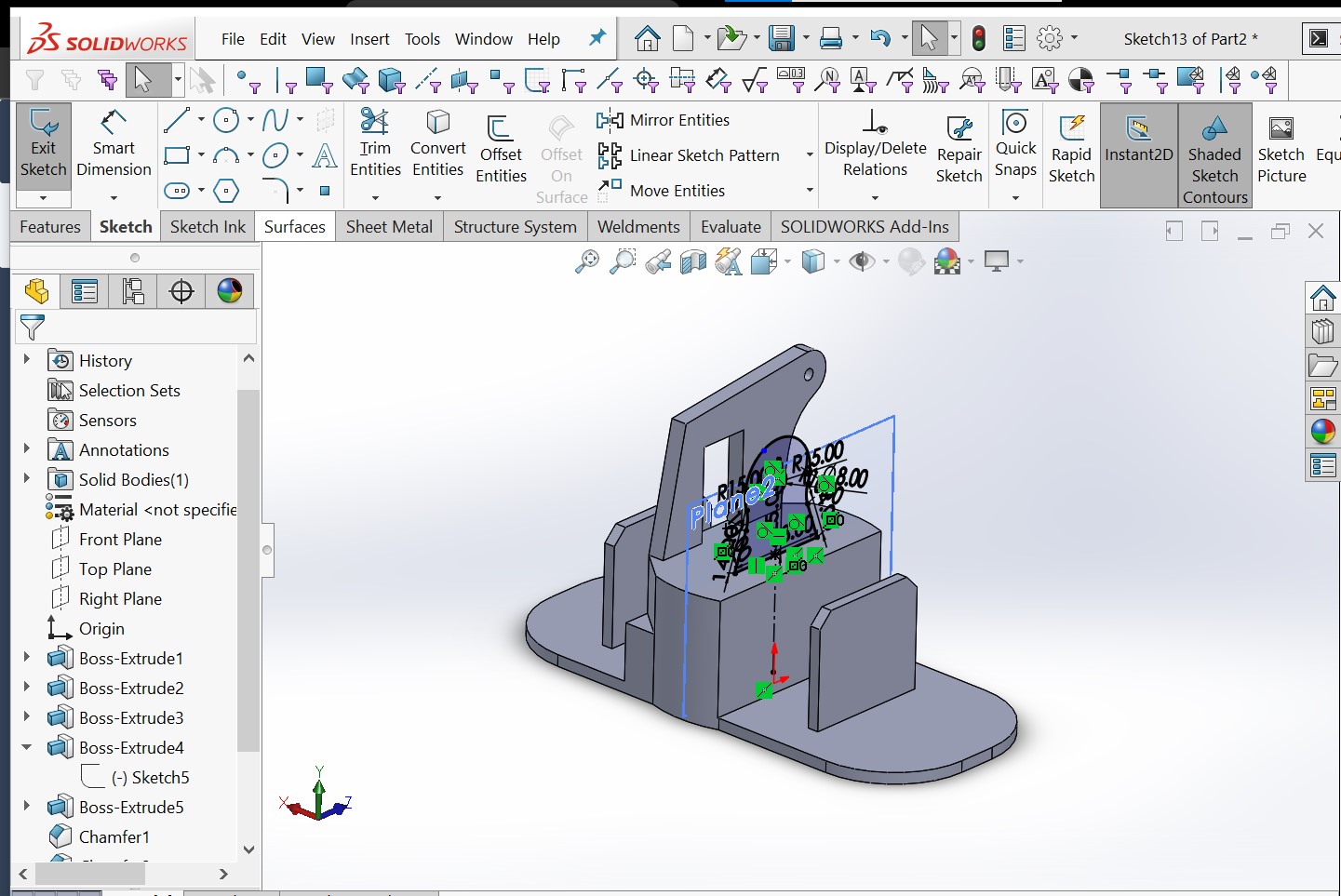
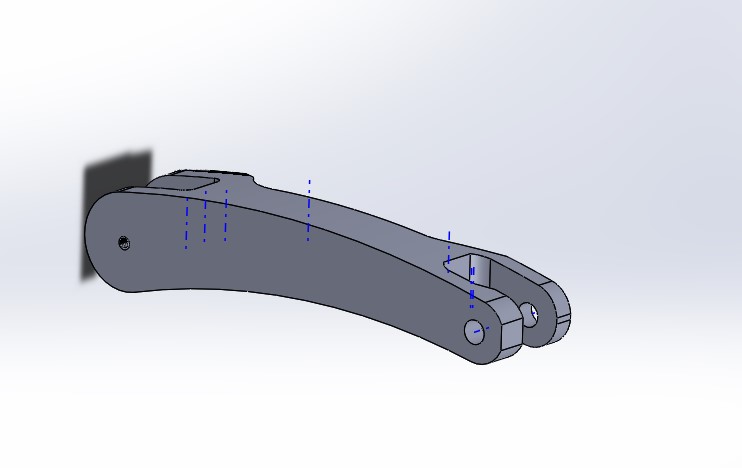
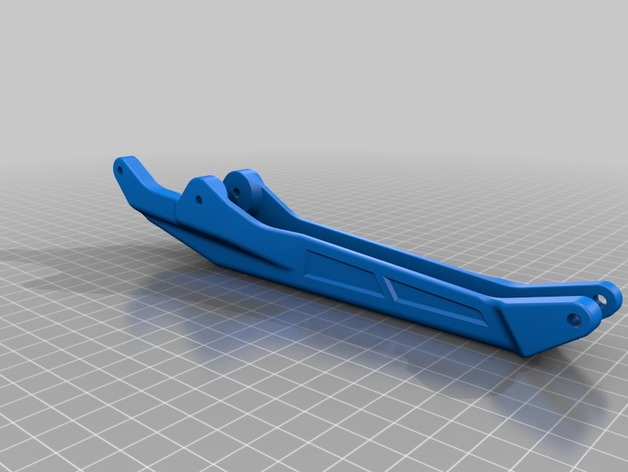
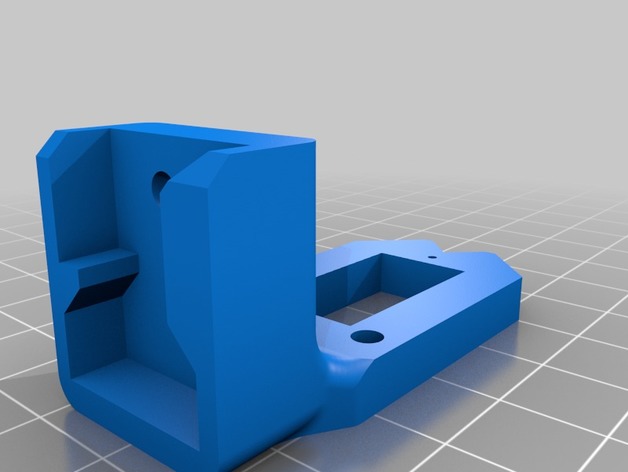
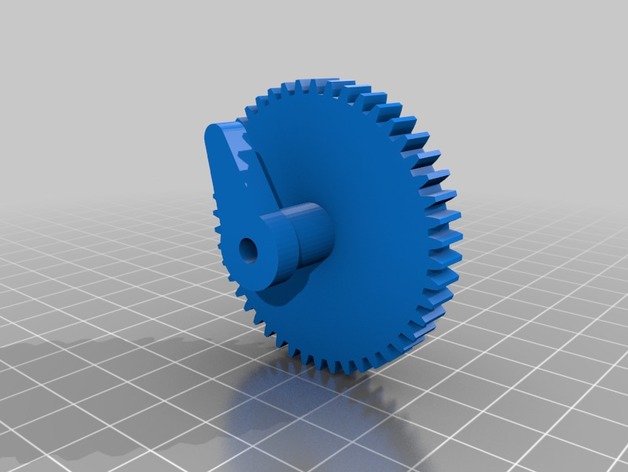
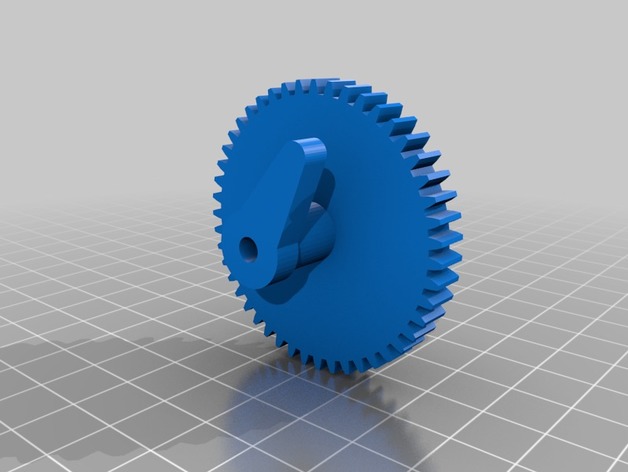
During machine building week i contribute in 3D design of arm robot, and assembling the parts afeter 3d printing of model. bellow there are aprocess of how th e flow of my contribution are.
3D DESIGN


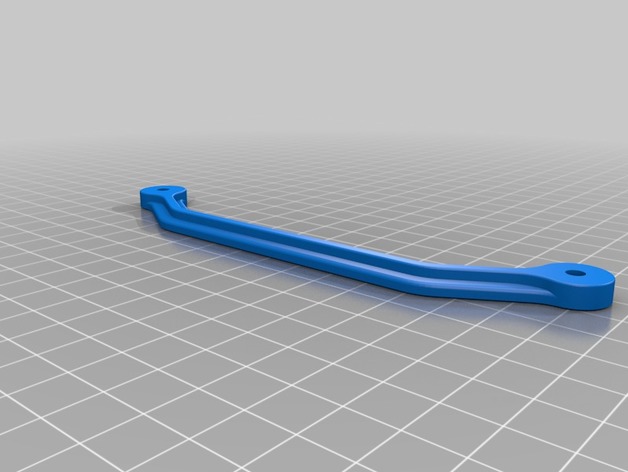




ASSEMBLING OF THE Robot