Machine Design
Assignment
- Group Assignment:
- Work and communicate effectively in a team and independently.
- Design, plan and build a system.
- Analyse and solve technical problems.
- Recognise opportunities for improvements in the design.
Output Preview
Machine Build
Idea & Tasks
For this week we worked as a group to design and operate a machine.
- We have gone through several ideas then decided to make Kinetic Sand Table.
- A metal ball- rolling silently through sand to automatically create and erase patterns
- We listed down each machine part and each of us took a specific task, mine was:
Linear Axis
- Design
- Fabrication & Assembly
- Electronics & Programming
- Testing & Documentation
Design & Fabrication
- I start by importing the different components from GrabCAD that I would use while desinging the Linear Axis
- Then I designed the parts I need to assemble my mechanism
- Then I assembled all the part together.
- Then I fabricate a assembled my parts
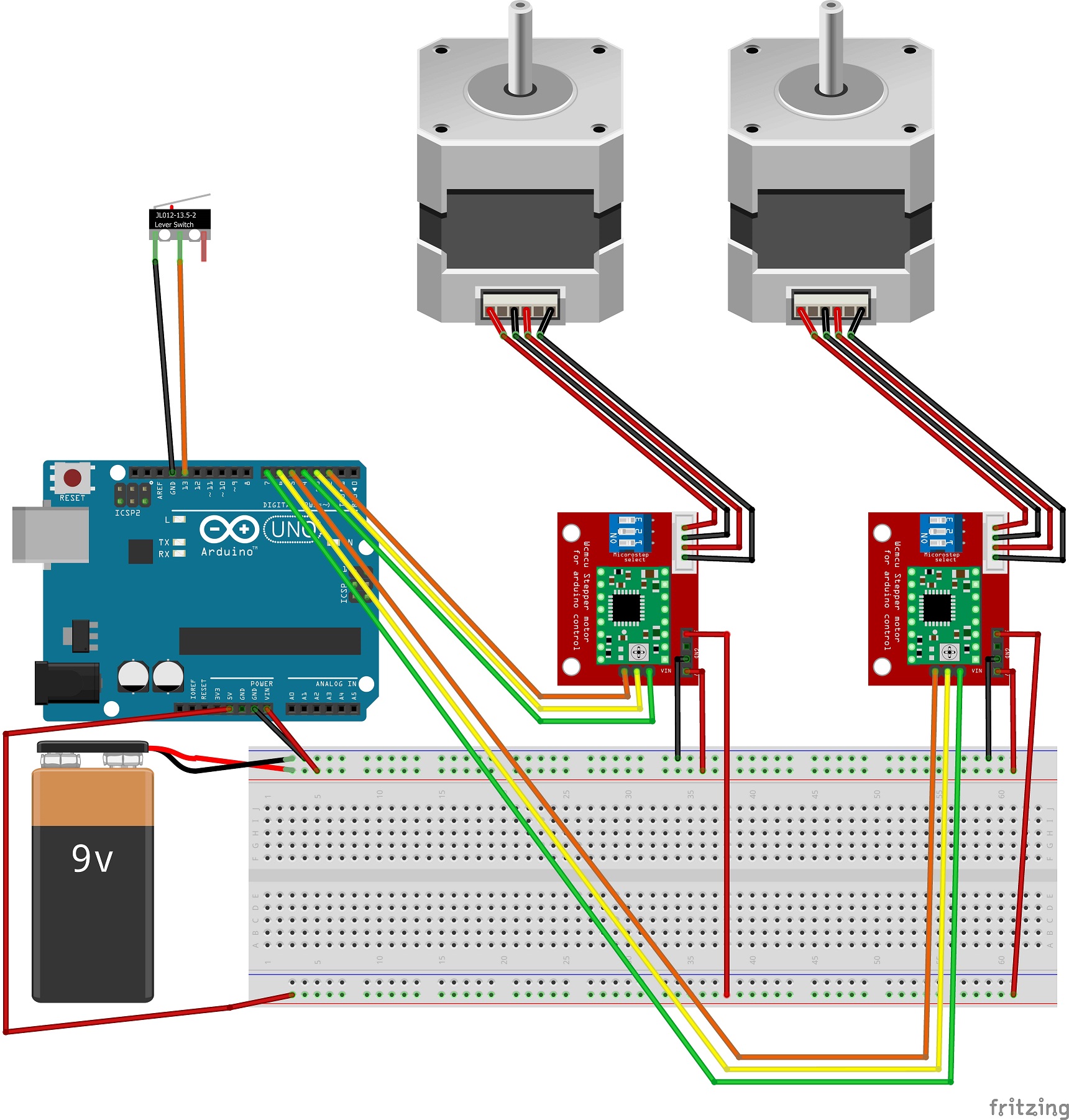
Electronics & Programming
The electronics we used for our machine are:
- Arduino UNO
- A4988 Modules
- Stepper Motors
- 9V Power Adaptor.
Wiring Diagram
Arduino Code
// Define connections for Motors
#define stepA_stepPin 2
#define stepA_dirPin 3
#define stepA_enablePin 4
#define stepA_homeSwitchPin 13
#define stepB_stepPin 5
#define stepB_dirPin 6
#define stepB_enablePin 7
#define steps_per_arm 3250 //3250 for full arm len
#define steps_per_revolution 9600 //200 * 3 ratio * 16 microstepping = 360 deg
// Define motion speed and direction parameters
bool stepA_dir_out = true;
bool stepA_dir_in = false;
bool stepB_dir_left = true;
bool stepB_dir_right = false;
int step_delay = 500;
void setup() {
// Set up stepper motor pins as outputs
pinMode(stepA_dirPin, OUTPUT);
pinMode(stepA_stepPin, OUTPUT);
pinMode(stepA_enablePin, OUTPUT);
pinMode(stepB_dirPin, OUTPUT);
pinMode(stepB_stepPin, OUTPUT);
pinMode(stepB_enablePin, OUTPUT);
// Setup limit switch as input
pinMode(stepA_homeSwitchPin, INPUT_PULLUP);
// Enable both steppers
digitalWrite(stepA_enablePin, LOW);
digitalWrite(stepB_enablePin, LOW);
// Perform homing sequence for Stepper A
while (digitalRead(stepA_homeSwitchPin) == HIGH) {
stepA_run(1, stepA_dir_out);
}
// Go to table center
stepA_run(steps_per_arm, stepA_dir_in);
}
void stepA_run(int steps, bool dir) {
stepper_run(steps, dir, stepA_stepPin, stepA_dirPin);
}
void stepB_run(int steps, bool dir) {
stepper_run(steps, dir, stepB_stepPin, stepB_dirPin);
}
void stepper_run(int steps, bool dir, int stepPin, int dirPin) {
for (int i = 0; i < steps; i++) {
digitalWrite(dirPin, dir);
digitalWrite(stepPin, HIGH);
delayMicroseconds(step_delay);
digitalWrite(stepPin, LOW);
delayMicroseconds(step_delay);
}
}
void loop() {
stepB_run(steps_per_revolution/4, stepB_dir_left);
stepA_run(steps_per_arm*0.8, stepA_dir_in);
stepB_run(steps_per_revolution/4, stepB_dir_right);
stepA_run(steps_per_arm*0.8, stepA_dir_out);
}
Testing
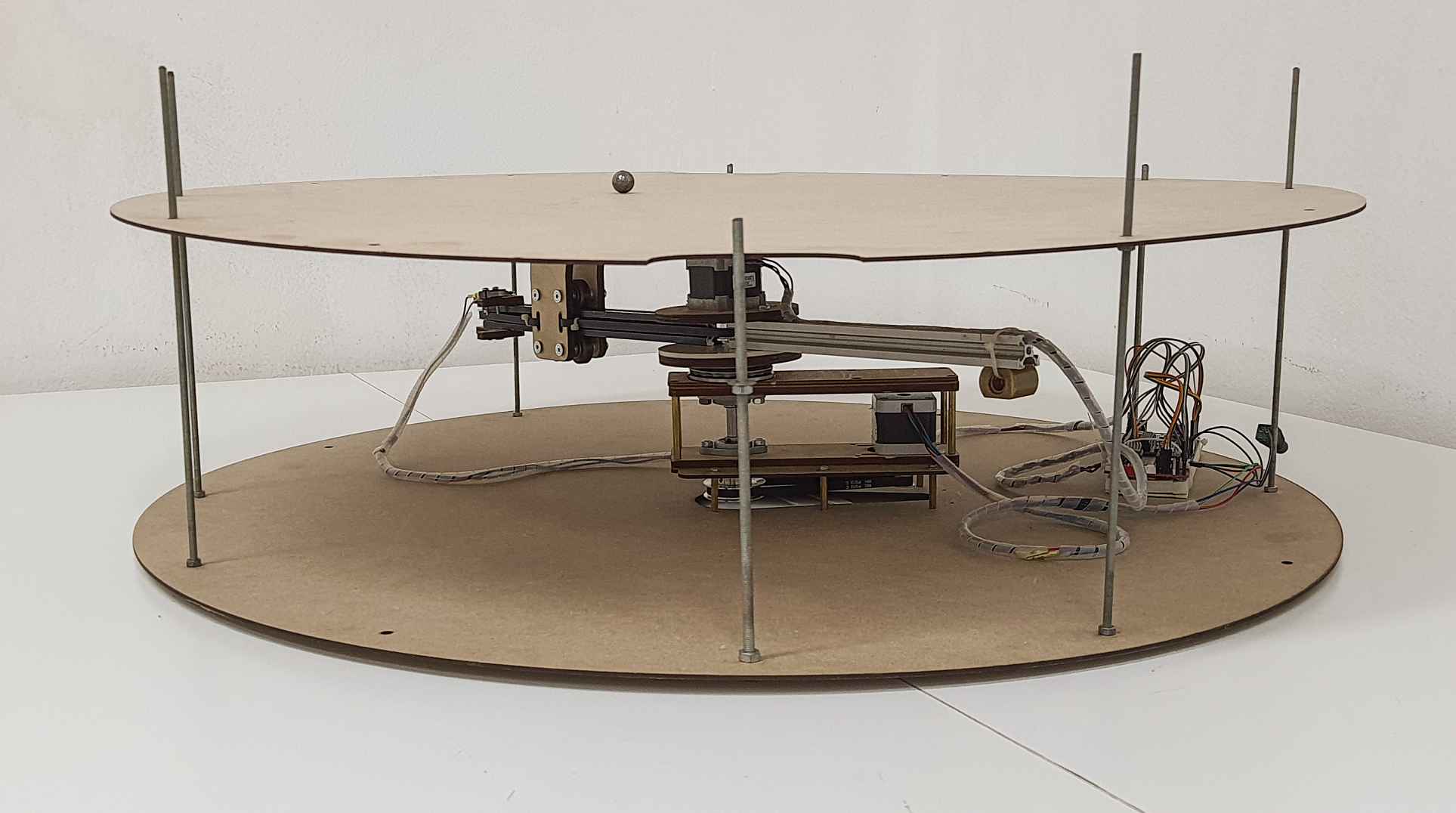
Hero Shot
Future Improvements
- Make the electric slip ring mechanism
- Homing the rotary axis
- Add a G-code processor
- Adding lights and other features
Challange
- Unfortunately, The Linear Axis was front heavy we had to add a counter weight at the back to balance the axis.
- At first the machine was very noisy and moved in a very jittery manner. To achieve smooth movement, we experimented with different microstepping settings, optimizing for the best possible performance. Microstepping is a technique used to improve the resolution and accuracy of stepper motors. For example, if a stepper motor has a full step of 1.8 degrees, microstepping could divide each full step into 16 micro-steps of 0.1125 degrees. This would provide a smoother and slower movement of the motor..