
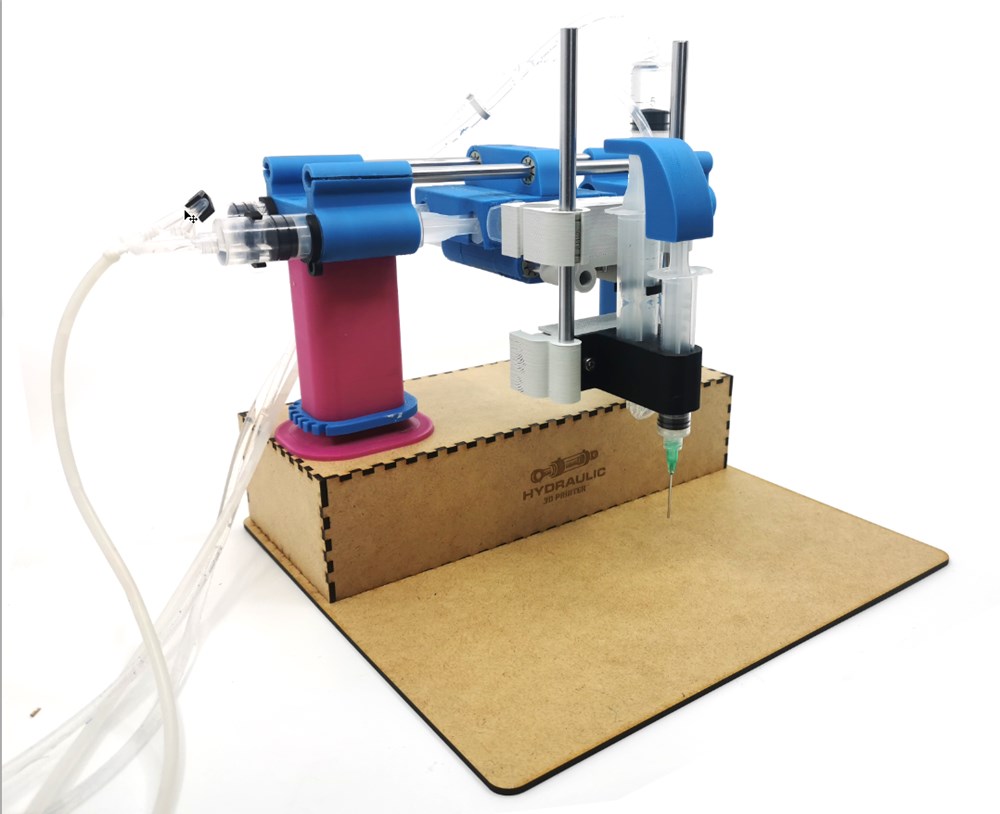
For this assigment, I decided to try to make an hydraulic 3D printer. All axis will be actuated with syringes and water. Nema 17 stepper motors will drive “control” syringes, water is transfered through pipes to axis syringes.
Hydraulic 3D printer
Design files
Wood base: corel_draw file 3D model: Fusion 360 files
Presentation video
Presentation slide
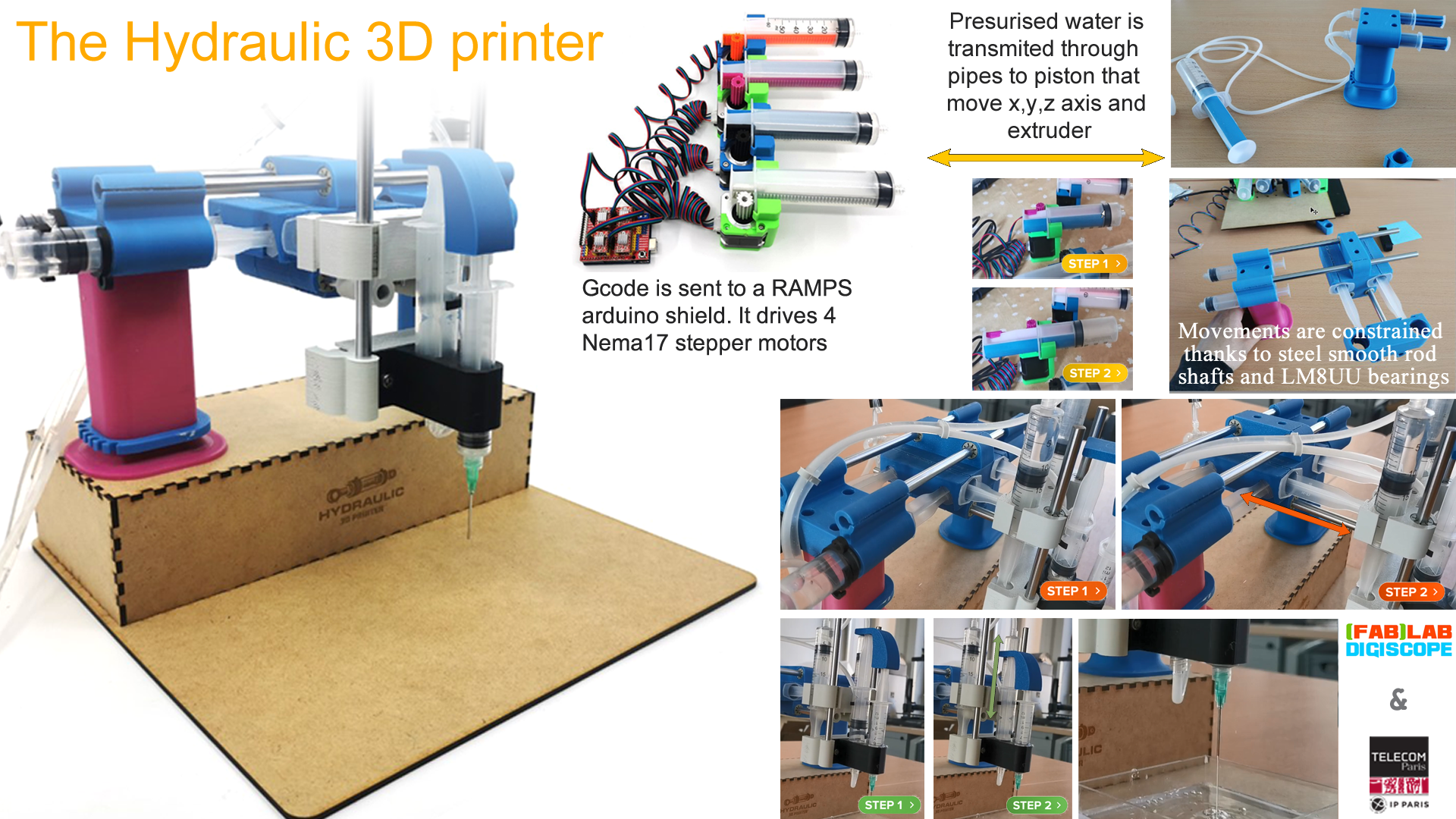
Principle of syringe actuated 3D printer
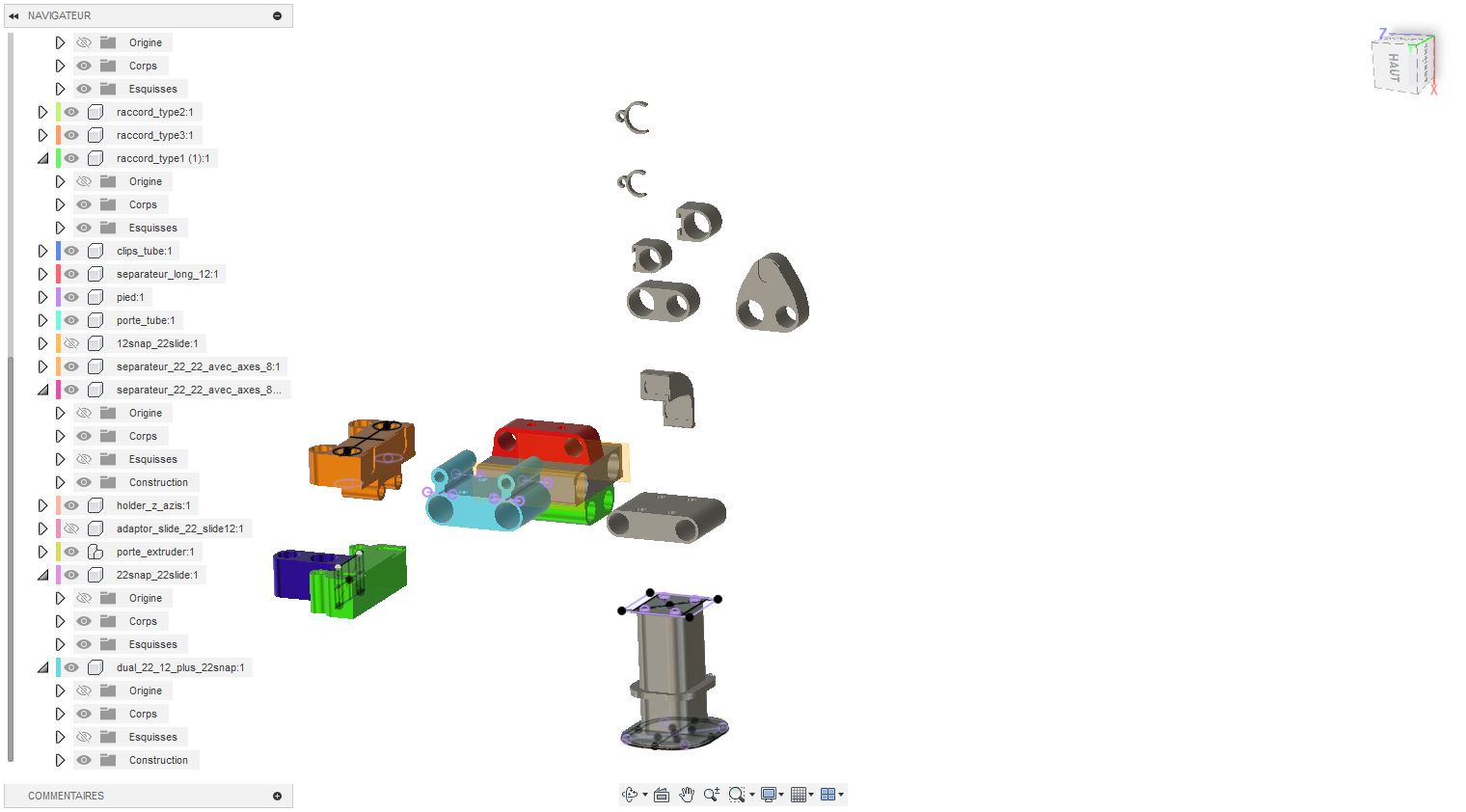
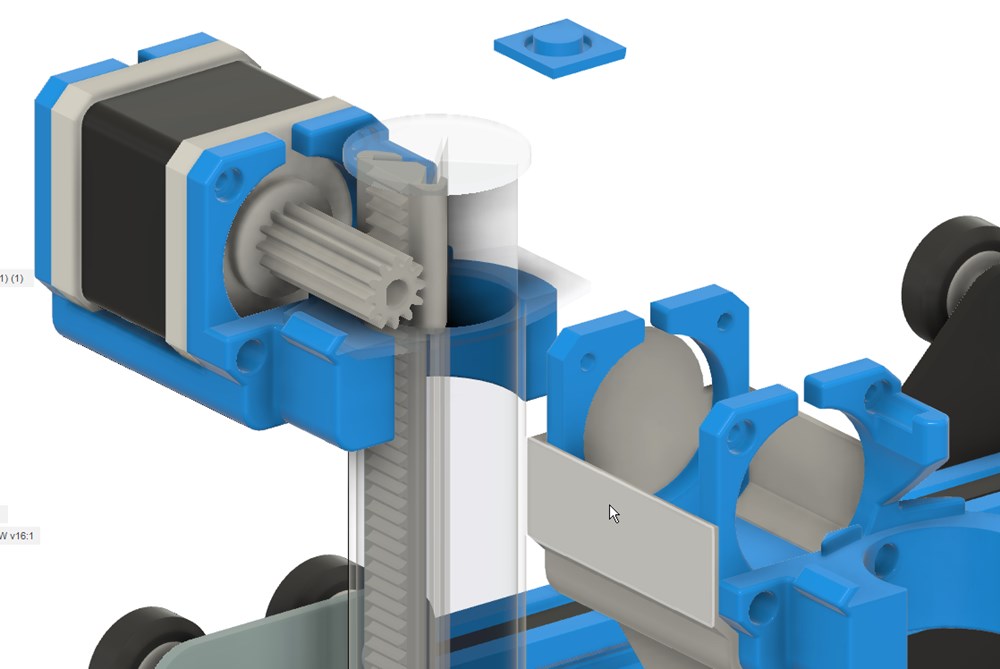
First proof of concept simulation in Fusion 360
First test of hydraulic actuation
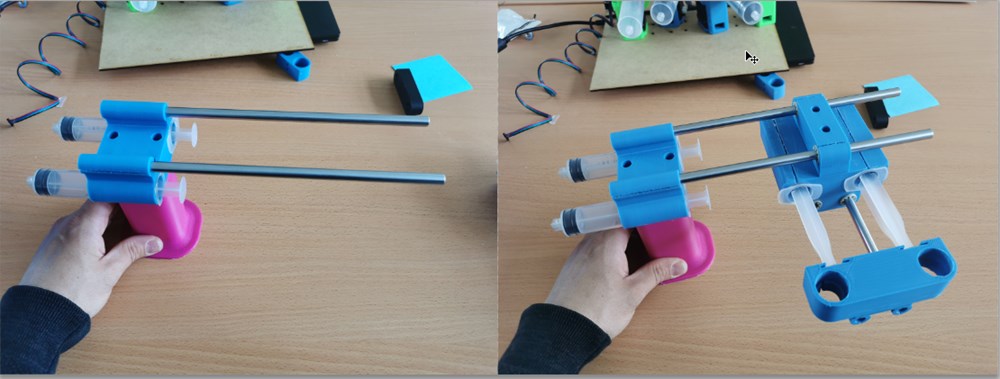
2 axis test. Pusher is wobbling a lot, especialy when the syringe is at max position. To try to reduced this effect, I add 4 quater round inserts into the pusher to smooth the movement. It works a little bit better but I had to think of something more accurate.
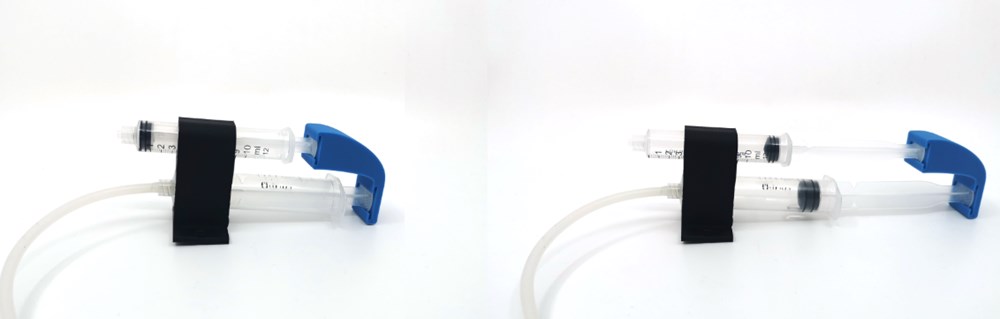
 I tryed with 2 connected syringes
I tryed with 2 connected syringes

It appear quite clearly that the mecanical wobbling will be to big to use syringe as it as 3D printer. We will use them as actuator but we will relied on a steel linear axis for movement restriction.
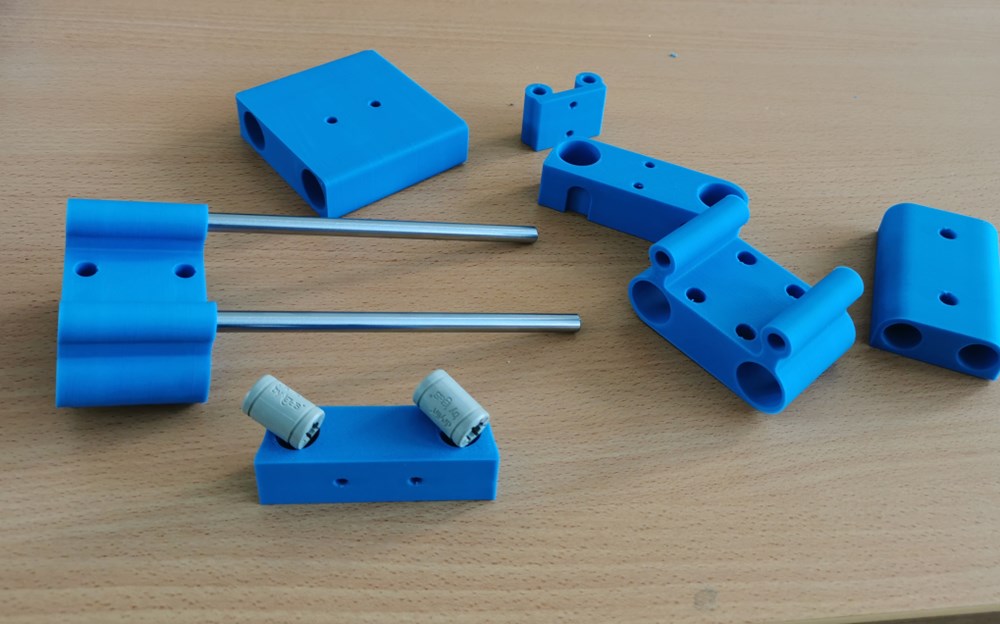
In replacement of the classical LM8UU ball bearing, I will use self-lubricated igus RJ4JP 01-08.
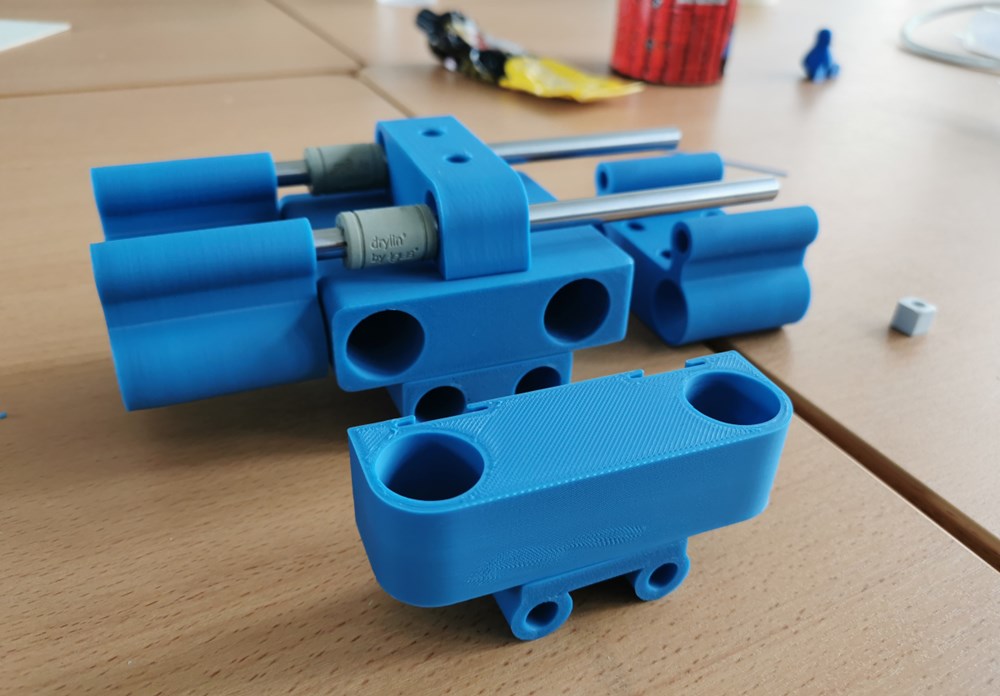
I design holes with a 0.2mm offset to allow bearing to fit. Unfortunatly, after pinting it appear that linear bearing are too tightly insered and that restrict the motion of the axis. To avoid to reprint everything, I cut the piece along it main axis:
 For future piece, I will ensure to add this notche by design
![[04_11_23_16_33_58-r.jpg]]
For future piece, I will ensure to add this notche by design
![[04_11_23_16_33_58-r.jpg]]

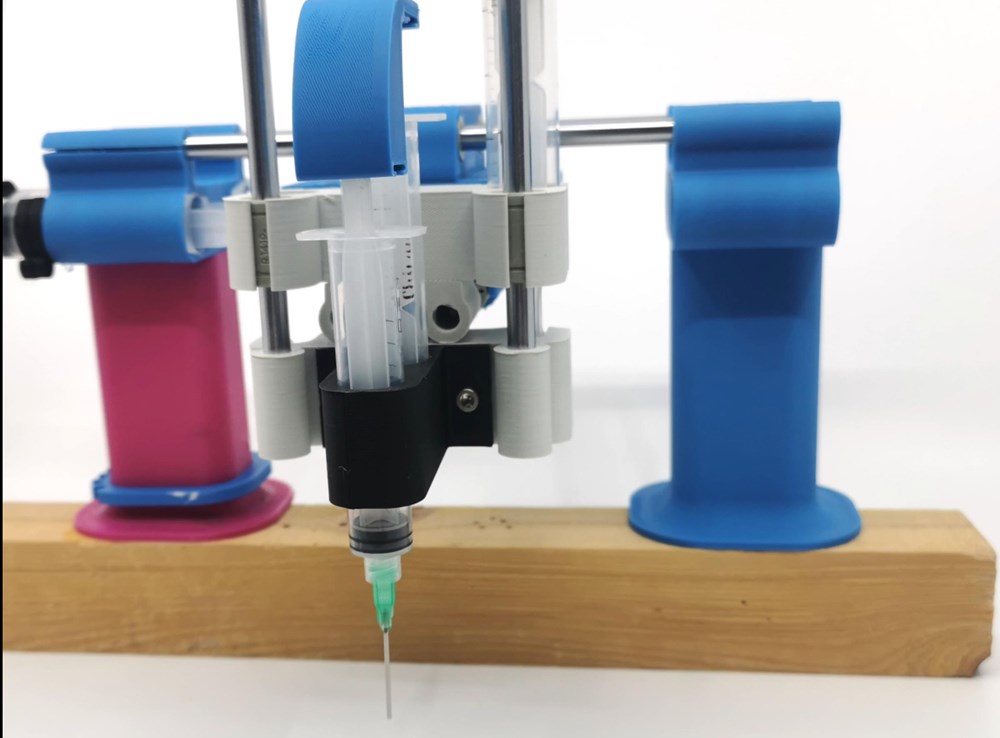
Extruder
For the extruded material, we can choose high viscosity fluid that would be difficult to push inside long silicon tubes. Insteed of pushing it from the main syringe, we will use one syringe filled with water to actued another one filled with extrudable material.
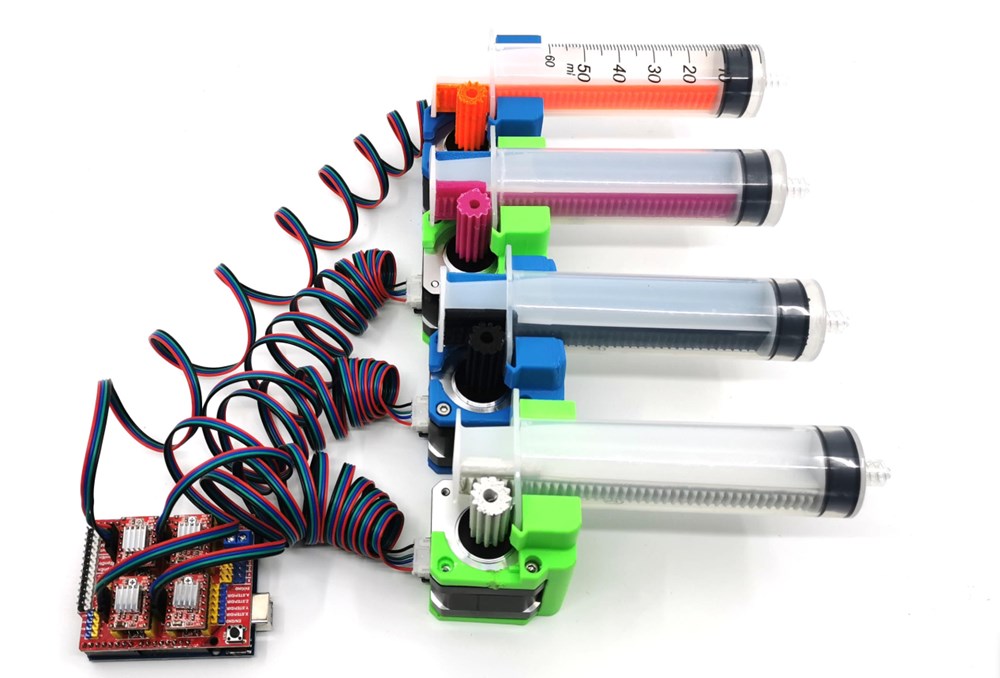
X,Y,Z and extruder motors
To drive syringe I use a design proposed by my instructor Romain DiVozzo.
I print 4 copies of this design for X,Y,Z axis and extruder. I connected those motors to an Arduino CNC shield. The arduino contain a version of GRBL, an open source firmware for CNC machines. I should use a RAMPS shield instead of the CNC shield, but I don’t have one in stock for now.
Ramps Shield
I download Marlin firmware here: https://github.com/firepick-delta/Marlin You can follow an installation tutorial here: https://firepickdelta.dozuki.com/Guide/How+to+Upload+Marlin+to+the+Arduino+Mega+2560/29
Making a box
For a better look of the printer, I design a laser cuted box, using this website https://www.festi.info/boxes.py/ and choosing boxes>basedBox. I adapt the base to make a plate for the printer.
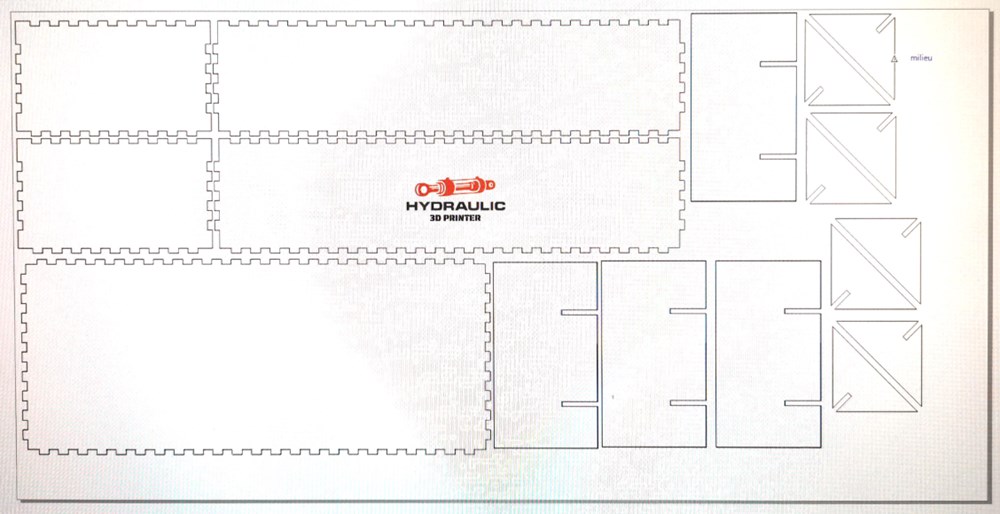
I add some reinforcement inside the box

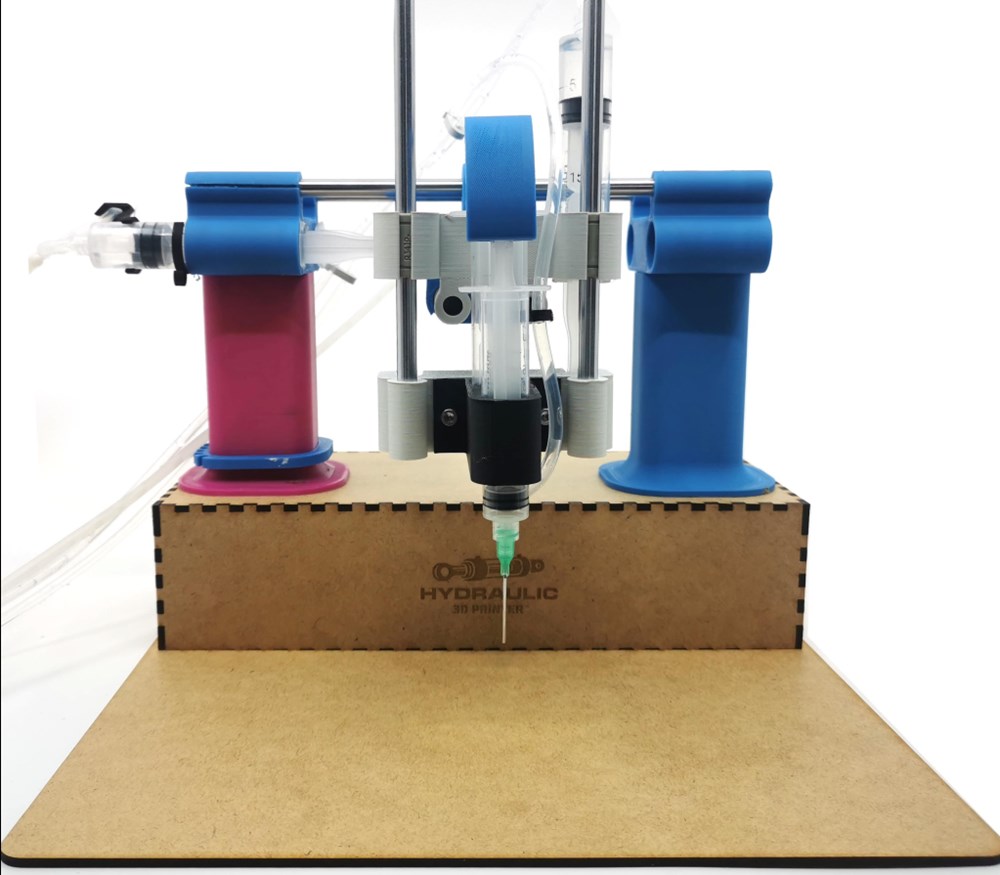
Print Volume: 52x65x55mm
Testing Gcode
Without water.
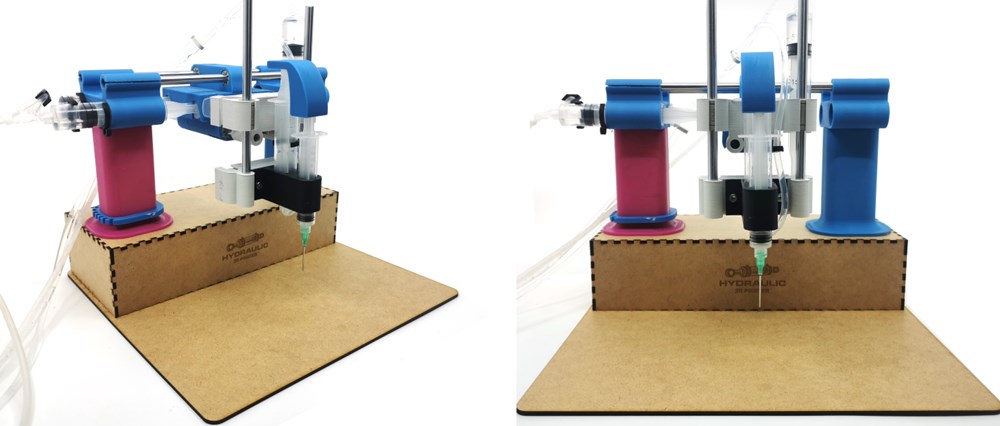
Extruder syringe actuated by water
Axis X, actuated by hand.
All axis actuated by hand.
Further work
The stepper motors motors seems not powerfull enough to move the syringes and often miss steps. We should increase their torque with gear ratio adjustement.