Concept
Robotic Arm
I'd like my final project to kickstart my education journey into robotics, for that I thought what better way other than to make a funtional robotic arm, the arm's basic function is simple, it articulates, picks stuff up and release them, it can mount different tools to perform a variety of functions, mount a 3d printers's hot end and it can 3d print, mount a soldering iron and you can solder remotly. put a pencil on it and have it sketch on paper, but I will start with only a pincer grabing arm and continu to improve it as I learn more.
here is a concept of the materials:
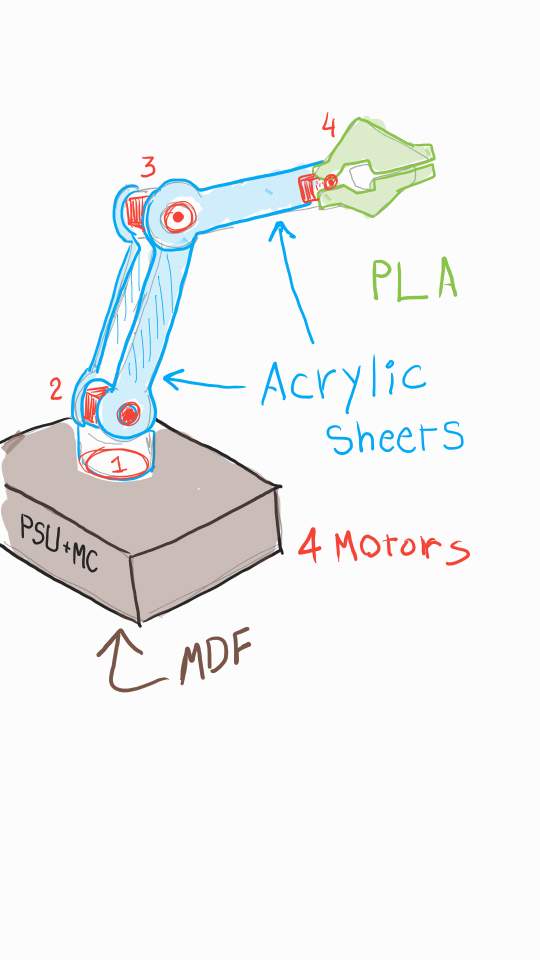
-The base should be heavy, so I plan to make it out of mdf, CNC would be used here to cut the boards, it would house the micro controller and the power supply unit(PSU).
-The arm limbs would be made of two layers of clear acrylic sheets, I plan to cut it in triangular shapes to reduce weight, clear acrylic would also make it easy to trouble shoot and see where problems arise, Laser cutter would be used for the acrylic.
-The grabber/claw/pincer will be made of PLA since it will likely be more comlicated than the other main parts, 3d printing will be used to build it along with other small components like gears and wire management solutions.
-I will initially plan on 4 motors but may adjust the number of motors based on weight or if I think I need more articulation, the motors will either be servos or closed loop stepper motors depending on weight, torque and availability.
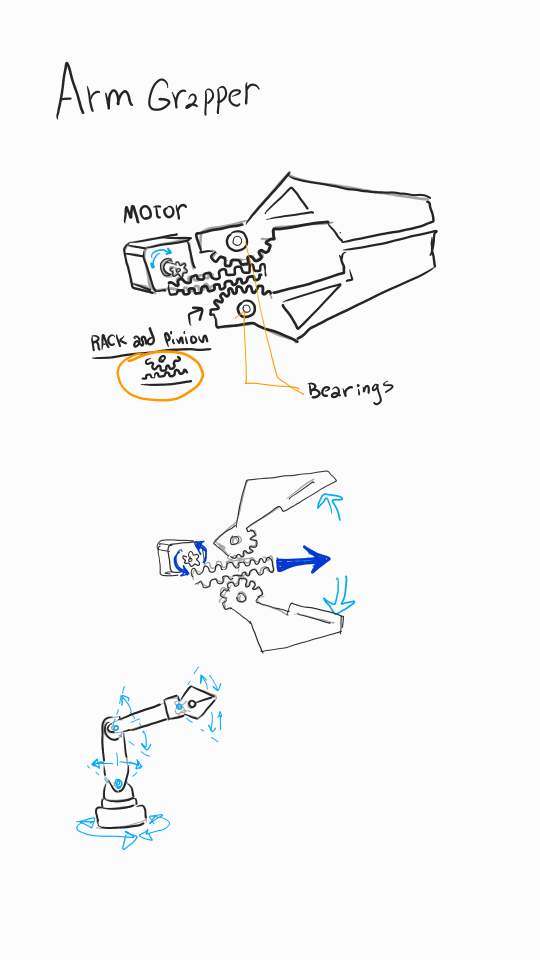
The Claw will be a simple rack and pinion gear arrangement, after the CAD design week I feel comfortable enough with fusion 360 to design this piece now, it will be made of three peices with the rack meshing with the claw motor.
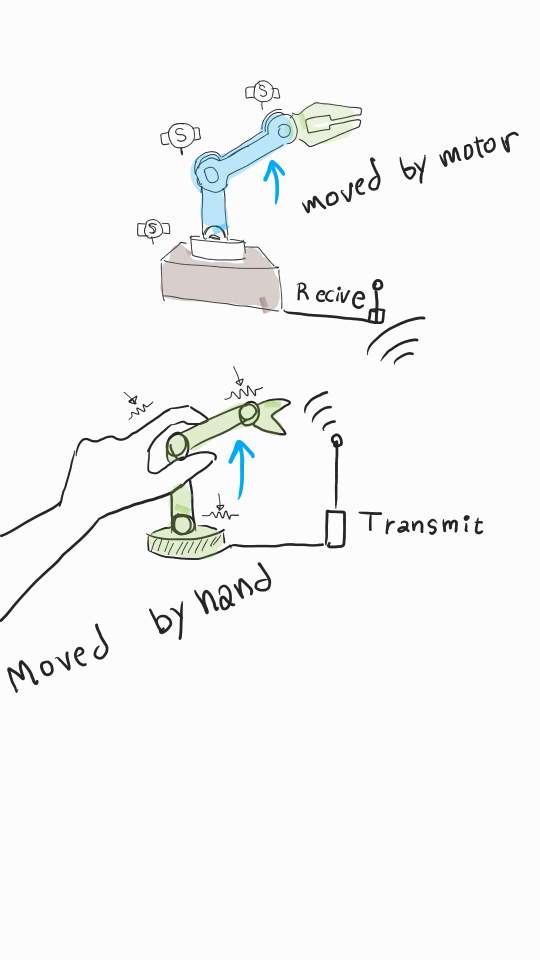
Concept for an alternate control device, using a smaller unmotorised arm and manipulating it by hand, it will send a postion signal to the motorised arm to imitate its position.
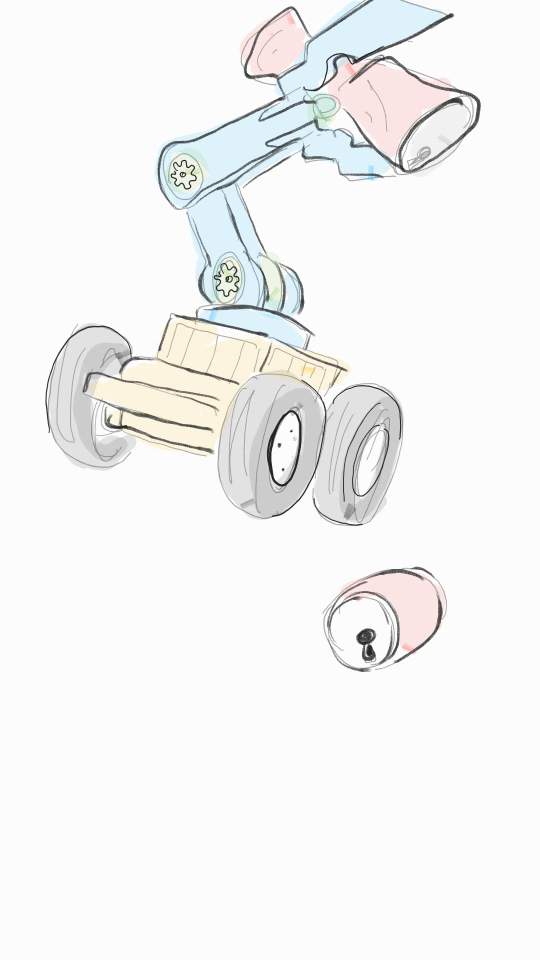
Mobile version that can be used to clean the streets.