
MACHINE DESIGN
GOALS FOR THE WEEK
- Design a machine that includes mechanism + actuation + automation
- Build the mechanical parts and operate it manually.
- Document the group project
- Document your individual contribution.
GROUP
INDIVIDUAL
THE CONCEPT
The group consists of Edu, Marco and Angel and we made a Tic-Tac-Toe drawing machine that you can play with. I was responsible for the Machine buiding and assembly.
Link to the group Documentation
PROCESS
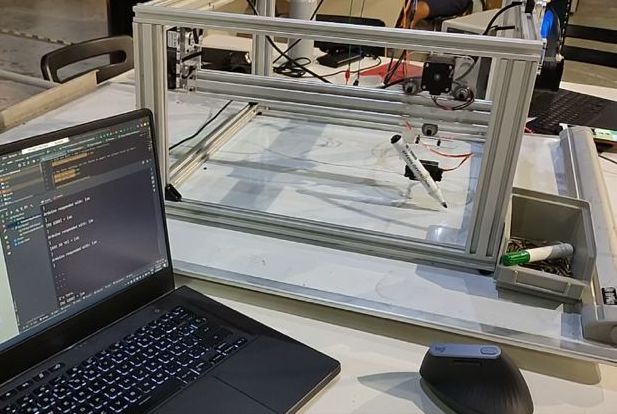
The machine that we have built has various mechanisms to operate and perform
action in all 3 spacial dimensions:
- 1 mechanism to operate on the X axis (1 degree of freedom) using dual stepper motors
- 1 mechanism to operate on the Y axis (1 degree of freedom) using a single stepper motor
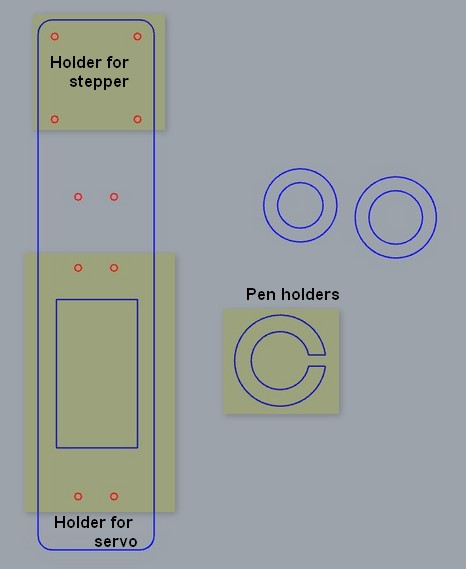
- 1 mechanism to operate on the Z axis (1 degree of freedom) using a single servo motor
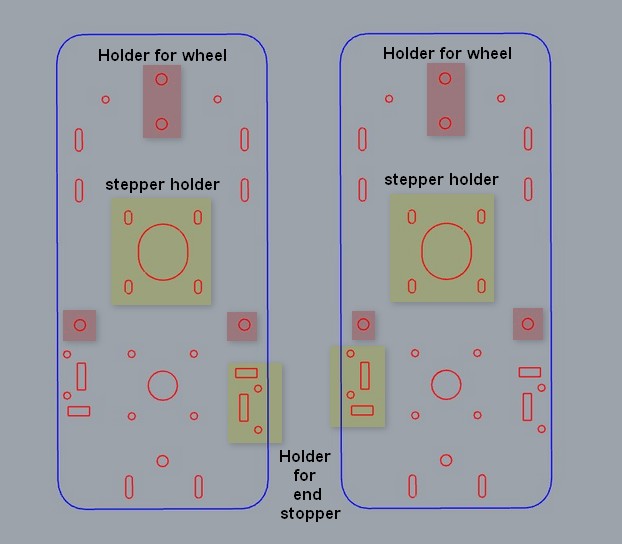
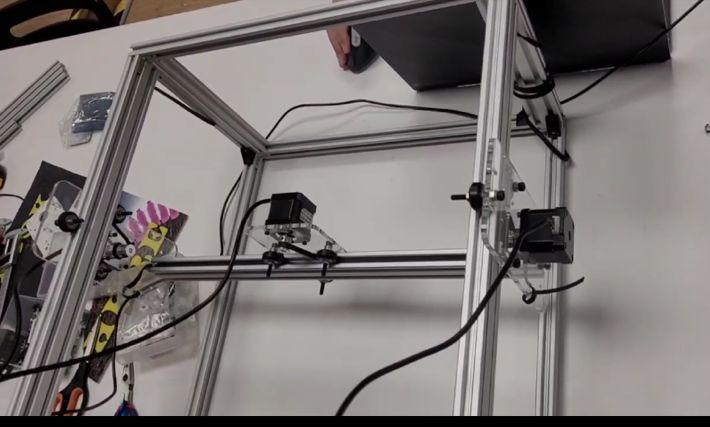
We used a partly assembled machine that was already at the lab. It consisted of 12 aluminium frames. We modified the existing frame in Rhino. We had to laser cut 5mm acrylic sheet for,
- Two holders on either side of the frame acting as X axis
- Frame in the center that holds on to the aluminium frame acting as the Y axis.
- Extension attached to the Y axis that also has a servo and pen holder.
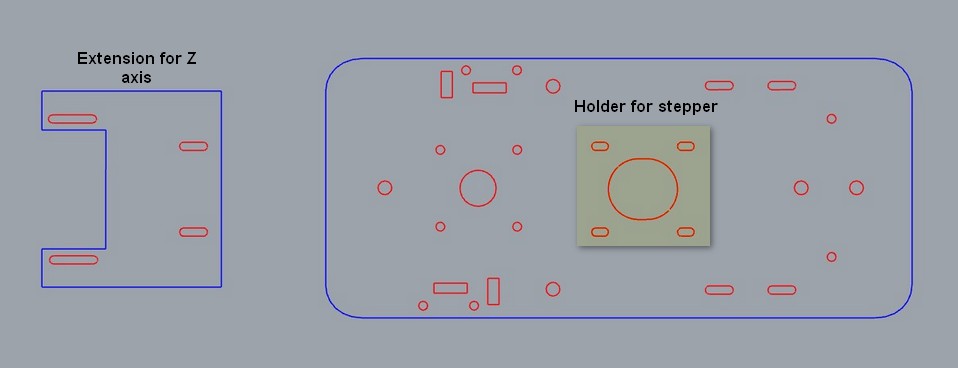
We either needed to make an extension for the Z axis or move the base up. We chose design an extension with a servo holder cutout that is fixed to the Z axis stepper holder.
We also made Z axis holder with an extended arm that can be used in further iterations of the machine.
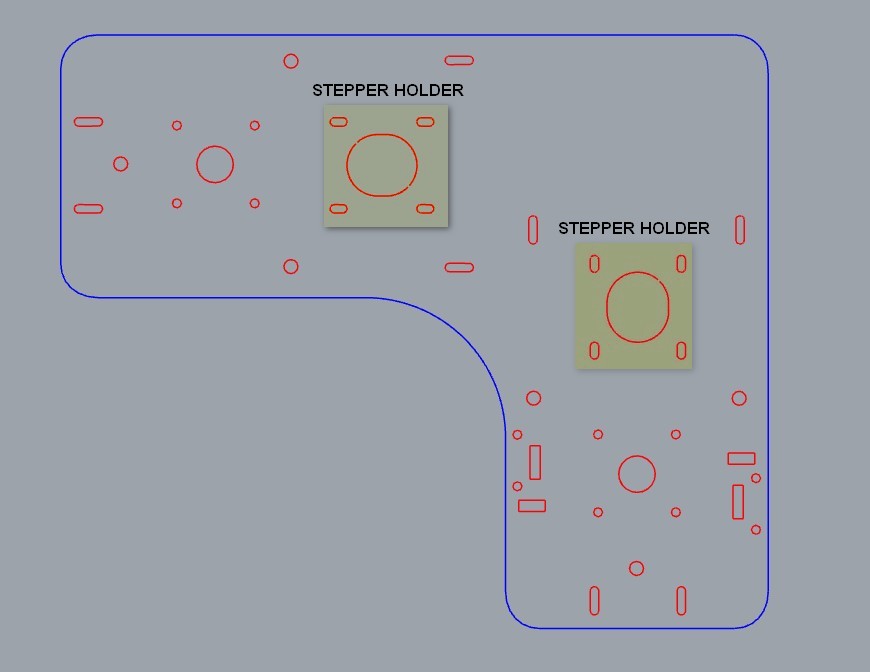
We also had to make a thread in the aluminium frame to attach to the holder with screws.

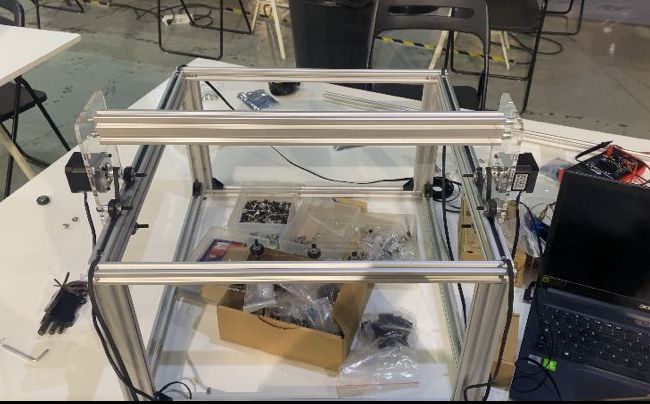
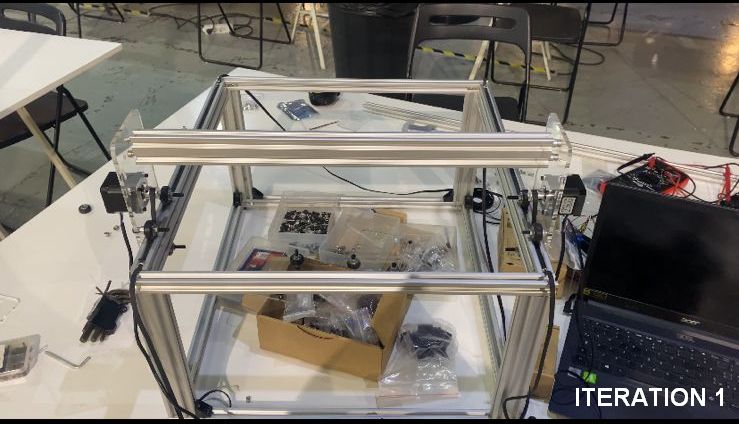
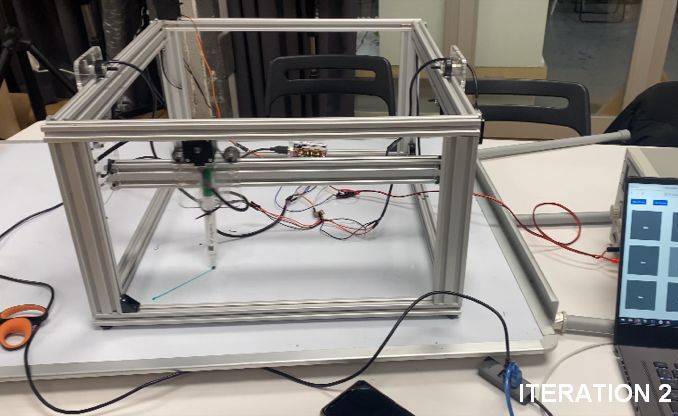
EVOLUTION
The first iteration of the assembly had the Y axis above the base frame and we were planning to make an extension arm as the Z axis. Eventually, we realised that flipped it upside down would make the Z axis shorter and makes the machine more stable.
Design files download
Rhino file