WEEK 16
Applications and Implications
Individual assignment: Propose a final project masterpiece that integrates the range of units covered. Answering:
1. Individual Assignment
1.1. What will it do?
MY IDEA FOR THE FINAL PROJECT IS TO BUILD A VIRTUAL REALITY SIMULATOR FOR ELECTRIC SCOOTER. "VR SCOOTER".
I design and build an electric scooter on a simulation platform that will integrate the movements made by the user in a virtual scenario created in Unity software, and it can also be viewed using Vive Cosmos HMD.
The user’s brake, throttle and steering handlebar actions are transferred to the virtual scene and their road slope are replicated on the platform.
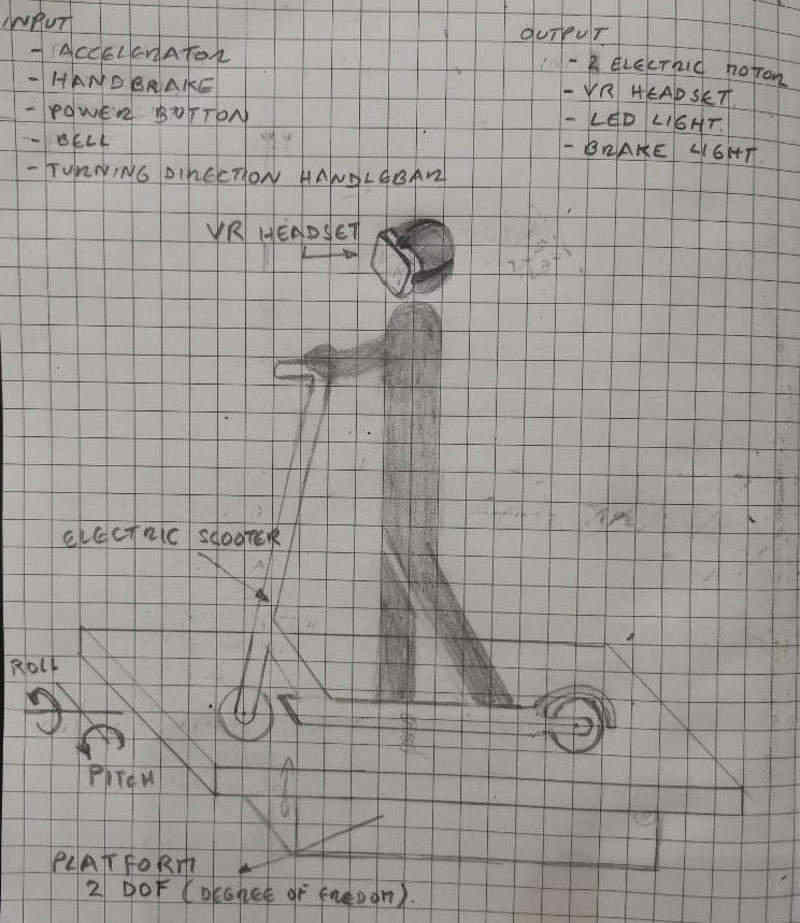
Replicate the structure of an electric scooter on the market (xiaomi pro 2), the functionality of the scooter is to integrate the following inputs (Throttle, handbrake, power button and direction)
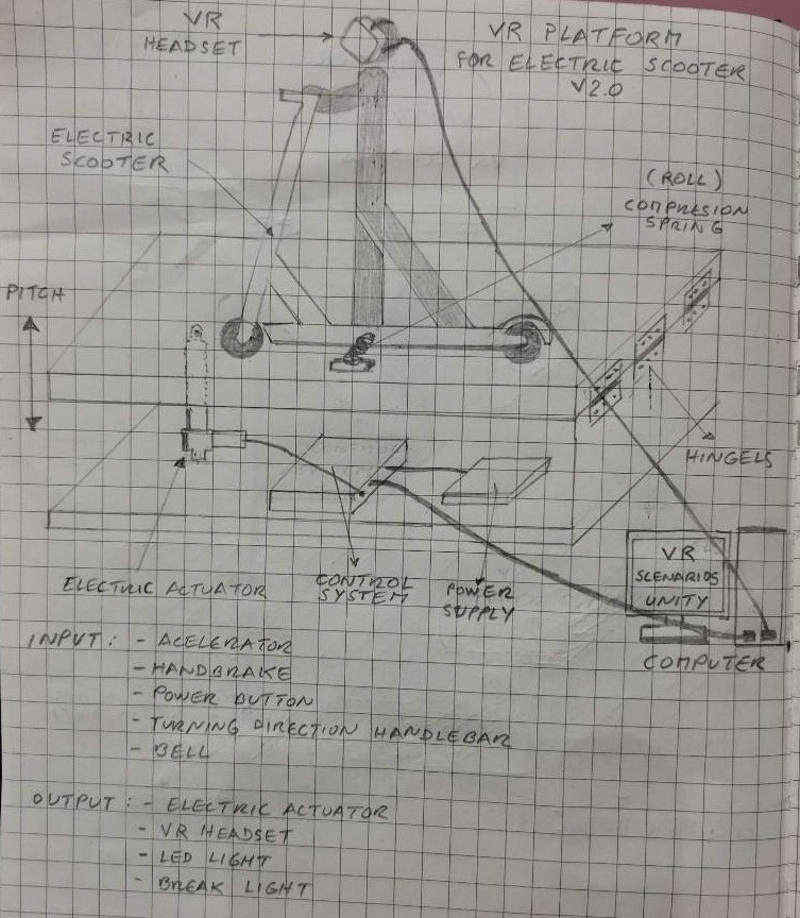
VR Scooter 1.0: Initially I have thought of a sketch of a 2 degree of freedom (pitch / roll) platform driven by two electric motors. In this new version the platform will only have 1 degree of freedom of movement, I will use an electric actuator for the movement (pitch), I have ruled out the movement (roll) since the user could fall from the platform and suffer an injury, in addition, the stage Virtual will simulate the tour of a city where you would only find slopes up and down.
The platform will be composed of:
- a power supply (230vac - 24vdc)
- a motion control system
- an electric actuator
- a fastening system for the electric scooter (a shock absorber is included to simulate a roll due to the inertial movement due to the movement of the user's body)
- the support structure
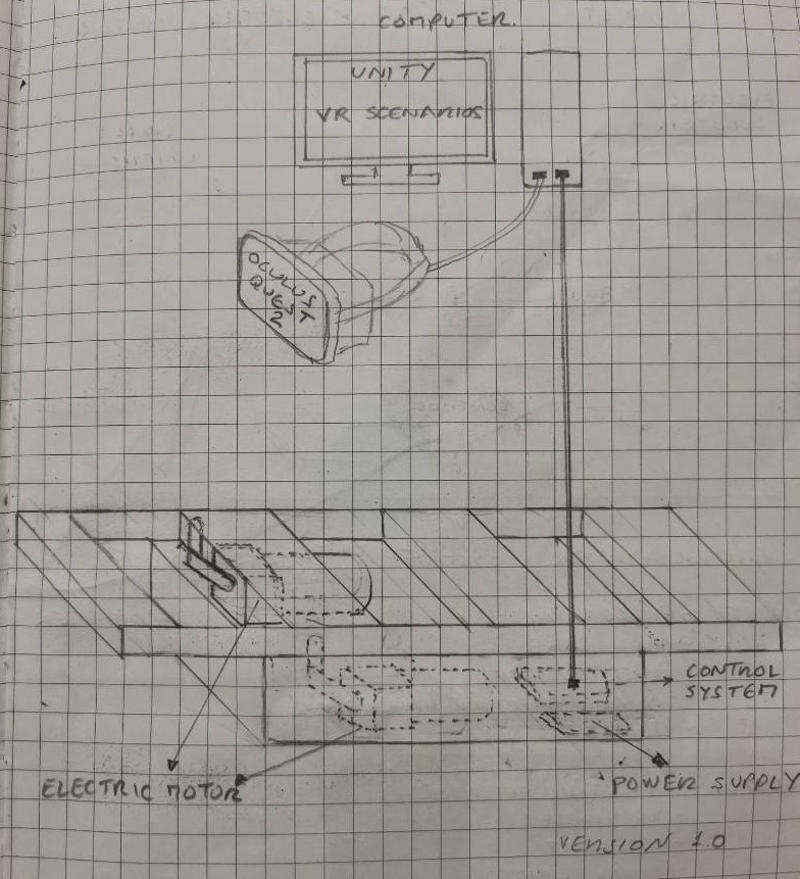
Creation of a virtual reality and communication scenario A computer will be used to create the scenario in the UNITY software and to communicate through the serial port with the platform. The visualization of the scene will be done through virtual reality HMD.
1.2. Who's done what beforehand?
I have not found any project that uses an electric skateboard simulator, but I have projects that have built electric skateboards like the following:
- http://fab.academany.org/2020/labs/deusto/students/ivan-gonzalez/#about
- http://fab.academany.org/2018/labs/fablabakgec/students/tarigoppula-saiadityavynatheya/FinalProject.html
- http://fab.cba.mit.edu/classes/863.14/people/desmond_lim/project-01.html
1.3. What will you design?
This project is composed in 3 parts:
- Desing and construction of an electric scooter (not funcional). Replicate the structure and inputs.
- Design and development of a 1 degree of freedom platform.
- Electronic design of an electronic board: motor control, direction, brake and accelerator sensors, led button for start.
- Creation scenario VR in Unity software and communicate with platform.
1.4. What materials and components will be used?, Where will come from? and How much will they cost?
Table of materials
1.5 What parts and systems will be made? and What processes will be used?
Almost all parts of the simulator will be manufactured. The structure of the electric scooter is manufactured in PLA using large format 3D printing (Discovery printer) and the smaller parts such as: brake, accelerator, steering with 3D printing (ender3 pro printer).
The handlebar grips will be made with molding and casting. I will create the low cost silicone molds with the router (Stepcraft420) and the casting material for the vytaflex40 urethane rubber compound handlebar grip.
The platform structure is made of wood by milling with the large format milling machine CNCBarcenas.
The electronic boards for the sensors and the electronic control board will be CNC milling (SRM-20) and soldering the electronic components.
1.6 What questions need to be answered?
Which motor to select to move the platform?: I must take into account the weight of a person, the weight of the electric scooter and the weight of the top wood of the platform.
How am I going to control the motor and which electronic board will I use?: During the week of output and electronic desing I will carry out motor control tests and look for chips to integrate into my electronic board
How am I going to get the sensor data for the throttle, steering and brake?; In the week of inputs, embedded programming I will look for sensors that can help me to obtain turning values for the steering and other sensors to obtain the physical values of acceleration and braking.
How to create a Virtual Reality interface?: I have previously developed virtual reality projects, so I will use the Unity software to create an interface and communication with the electronic board. I will also configure the VR glasses. Finally I will create a virtual scene of a city where the user can make tours with the scooter. I will be guided by what I do in Networking and communication / Interface and application programming week.
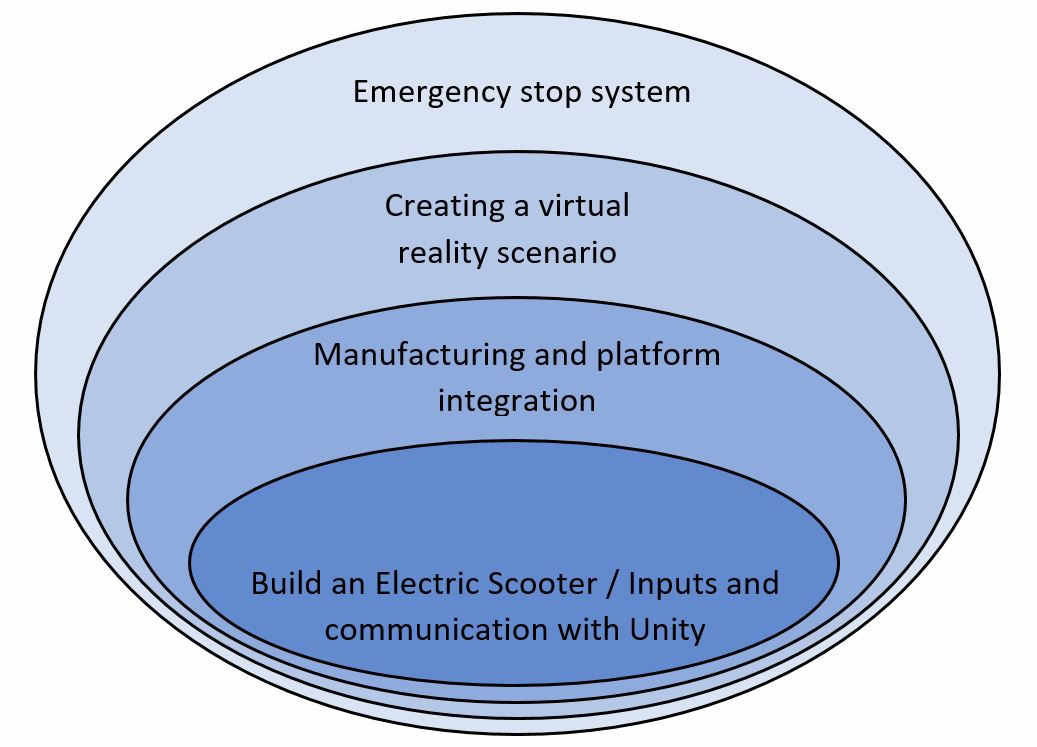
1.7 How will it be evaluated?
I have structured the project in a spiral diagram. In each spiral, the operation of the device can be evaluated