Mechanical Design¶
Group assignment:¶
- Design a machine that includes mechanism+actuation+automation
- Build the mechanical parts and operate it manually
- Document the group project and your individual contribution
A spherification module for the fab 4xiDraw¶
Overview¶
For the two machines week, we want to make a Syringe pump end-effector for the 4xiDraw.
- The 4xiDraw is an open source and well documented XY plotter
- We want to add an end effector supporting a needle, and connected to a Syringe pump.
- This machine could open many applications opportunities: from the culinary spherification process, to applications in soft mater research.
The particularities of our work are the following:
- We will rebuild the two open-source machines (4xiDraw and Syringe pump), and integrate them
- A dedicated end-effector support will be designed for the 4xiDraw
- The objective is to develop a single interface, to control the XY plotter and the syringe pump
- We will also add end-stops to avoid the machine to break
Inspiration and resources¶
Here are the different references we looked at to define our project and build our documentation:
- FabAcademy 2018 ULB group’s project for the Machine design
Start point for our machine, improving some details and adapting the end effector to use among others, a syringe pump, in ordrer to develop a spherification process - Prusa
The structure of the Prusa’s manuals is quite easy to read and understand… An inspiration for our wiki… - Lasersaur
The different steps for assembly and operation are good examples, maybe tedious to read but really useful… - CNC Humphrey
- Neil’s course and recitation
Some useful tricks to be found here.... - The Octobot, an integrated soft robot made in Harvard and using a similar machine.
Testing the physics¶
First thing: testing the physic of spherification! Here is an example of spherification using the same kit that we did:
Materials:¶
Spherification solution:
- 1 recipients
- 1 mixer
- 2g of sodium alginate
- 470 ml of water
- Colorant
Calcium bath:
- 1 recipient
- 1 spoon
- 5g of calcium lactate
- 1l of water
Spherification process
- 1 syringe
- 1 needle
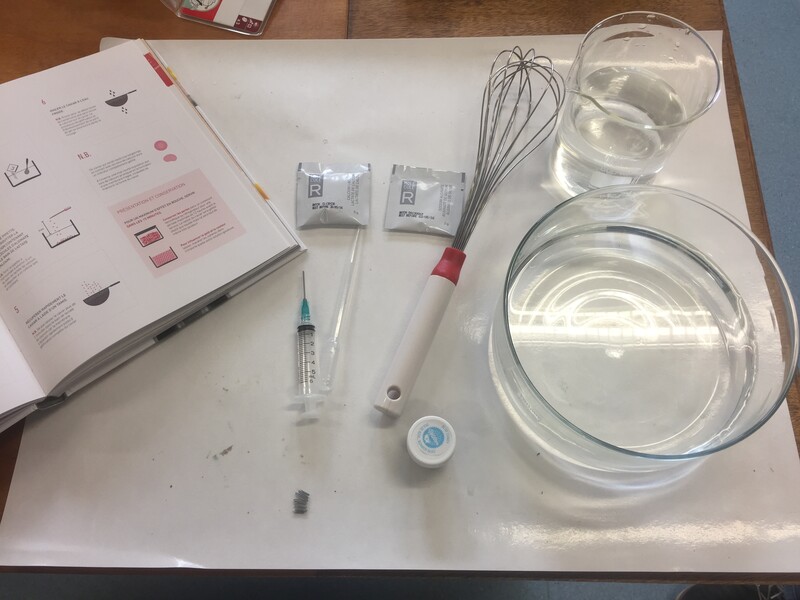
Preparation:¶
Just mix the ingredients of each solutions. You can add anything you want to add taste to the sherification solution. The spherification solution is a little bit more tricky, because the mixing is more compicated. We used magnetic mixer and a vacuum pump to remove the bubbles, but a simple mixer is also good. Once everything is ready, take the spherification in the syringe, and make the spheres by making droplets of the spherification solution in the bath!
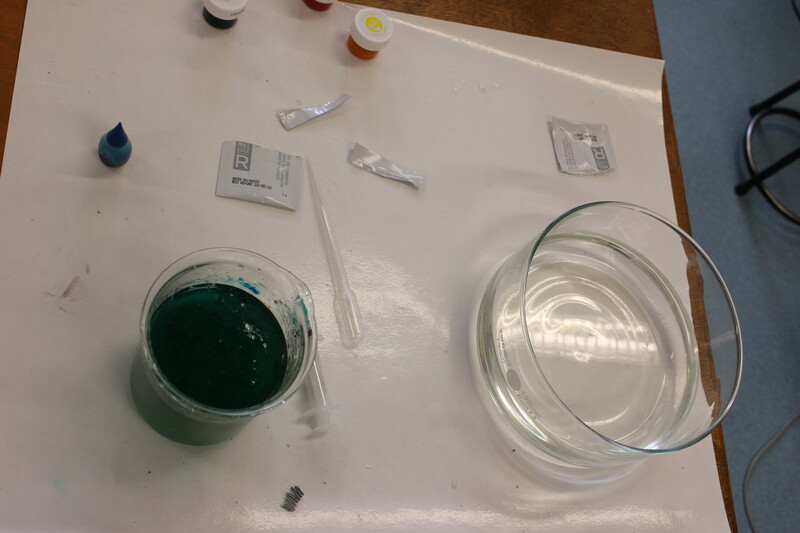
Tested configurations¶
We tested several configurations with the process and solutions desrcibed above:
- Dropping droplets from above the surface: this makes good results!
However, we want to make the droplets by making a continuous release of spherification solution.
- Making a continuous release of spherification solution in the calcium bath:

It makes filaments! It is not what we excepted, but it gives interesting results! By changing the speed and flow of the needle, we change the thickness of the filament.
We also tested non commestible solutions, to try to make our droplets:
- Using a bath of silicone oil 50 and demineralized coloured water:
It gives the expected result, we have a proof of concept!
- Using a bath of silicone oil 50 and coloured ethanol:
Idem, it gives the expected result.
- Using the spherification solution in a silicone oil 50 + calcium lactate bath
We want a solution to make eatable spheres with the same process. We test here with silicone oil, but we’ll have to test again with vegetal oil. It gives bubbles, but the calcium is not miscible in the oil, and the spherification process is not perfect.
Anyway, we have a proof of concept, let’s do the machine!
Bill of materials¶
4xiDraw¶
3D printed parts:
| Part pic | Part description | # | stl |
|---|---|---|---|
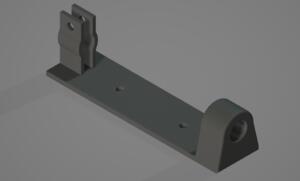 |
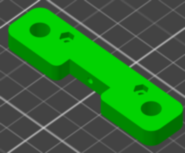
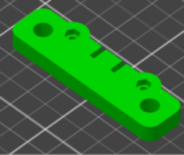
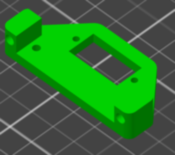
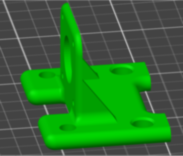
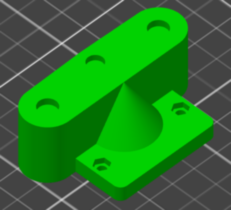
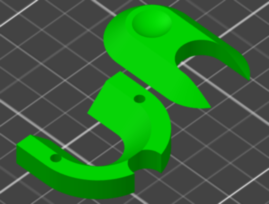
Needle holder | 1 | stl file |
 |
Pen_Carriage with rack and pinion (rack) | 1 | stl file |
 |
Pen_Carriage with rack and pinion (pinion) | 1 | stl file |
 |
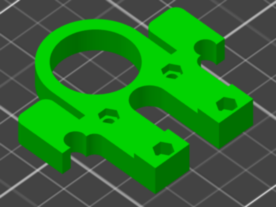
End Y belt holder | 1 | stl file |
 |
End Y2 belt holder | 1 | stl file |
 |
Servo holder | 1 | stl file |
 |
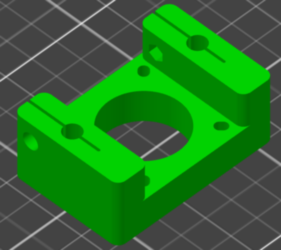
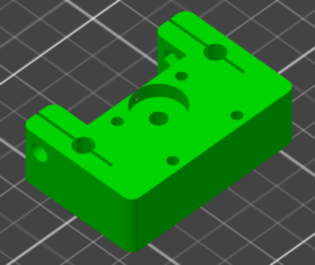
Stepper motor holder | 2 | stl file |
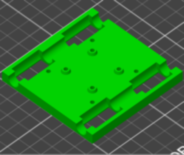 |
Base | 1 | stl file |
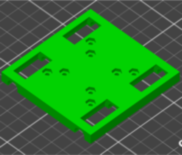 |
Base with nuts | 1 | stl file |
In bold are indicated the custom made pieces(needle holder).
The needle holder is made to be as modular as possible. It is placed the same way than the pen holder in the original design. The needle and connection to the syringe pump are made using Luer lock connector.
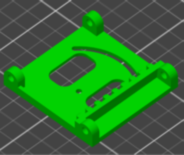
Note that some pieces have been rotated 90° in the slicer for production, in order to improve adherence to the heating plate when using PETG material.
commercial parts:
| Part description | # | Part number |
|---|---|---|
| Luer lock male to female | 1 | |
| Needle Luer lock | 1 | |
| Silicone tubing | 1 | |
| Luer lock to barb connector | 1 | |
| Power supply 12V 2A | 1 | PS1220N |
| Stepper motor | 3 | 17HS15-0404S |
| Arduino UNO Shield CNC | 1 | ARDCNC-K1 |
| Arduino UNO | 1 | |
| Servomotor | 1 | SG90 |
| Steel axis 6x150mm | 1 |
Syringe pump¶
The syringe pump is well documented here. Original 3D files can be found here
3D printed parts:
| Part pic | Part description | # | stl |
|---|---|---|---|
 |
Motor End | 1 | stl file |
 |
Carriage | 1 | stl file |
 |
Plunger Holder base and tab | 1 | stl file |
 |
Body Holder | 2 | stl file |
 |
Idler End | 1 | stl file |
Those pieces have mainly not been modified, but we had to make some custom parts to adapt them to our ball bearing and shaft coupler (we had 9mm external diameter roller bearing and 5m x 8mm shaft adapter). We also had to adapt the carriage for multiple syringes sizes:


Here is link to all the modified and supplementary stl files.
commercial parts:
| Part | # |
|---|---|
| NEMA17 motor | 1 |
| 5mm x 5mm shaft coupling | 1 |
| 625z ball bearing | 2 |
| LM6UU linear bearing | 2 |
| M3 x 10mm socket head cap screw | 6 |
| M3 x 20mm socket head cap screws | 4 |
| M3 x 40mm socket head cap screws | 4 |
| M3 hex nut | 13 |
| M5 hex nut | 5 |
| M5 threaded rod 0.2 m | 1 |
| 6mm A2 tool steel 0.2 m | 2 |
Assembly¶
Assembly of the 4xiDraw¶
The assembly process is well described here
(Awaiting the delivery of the commercial pieces)
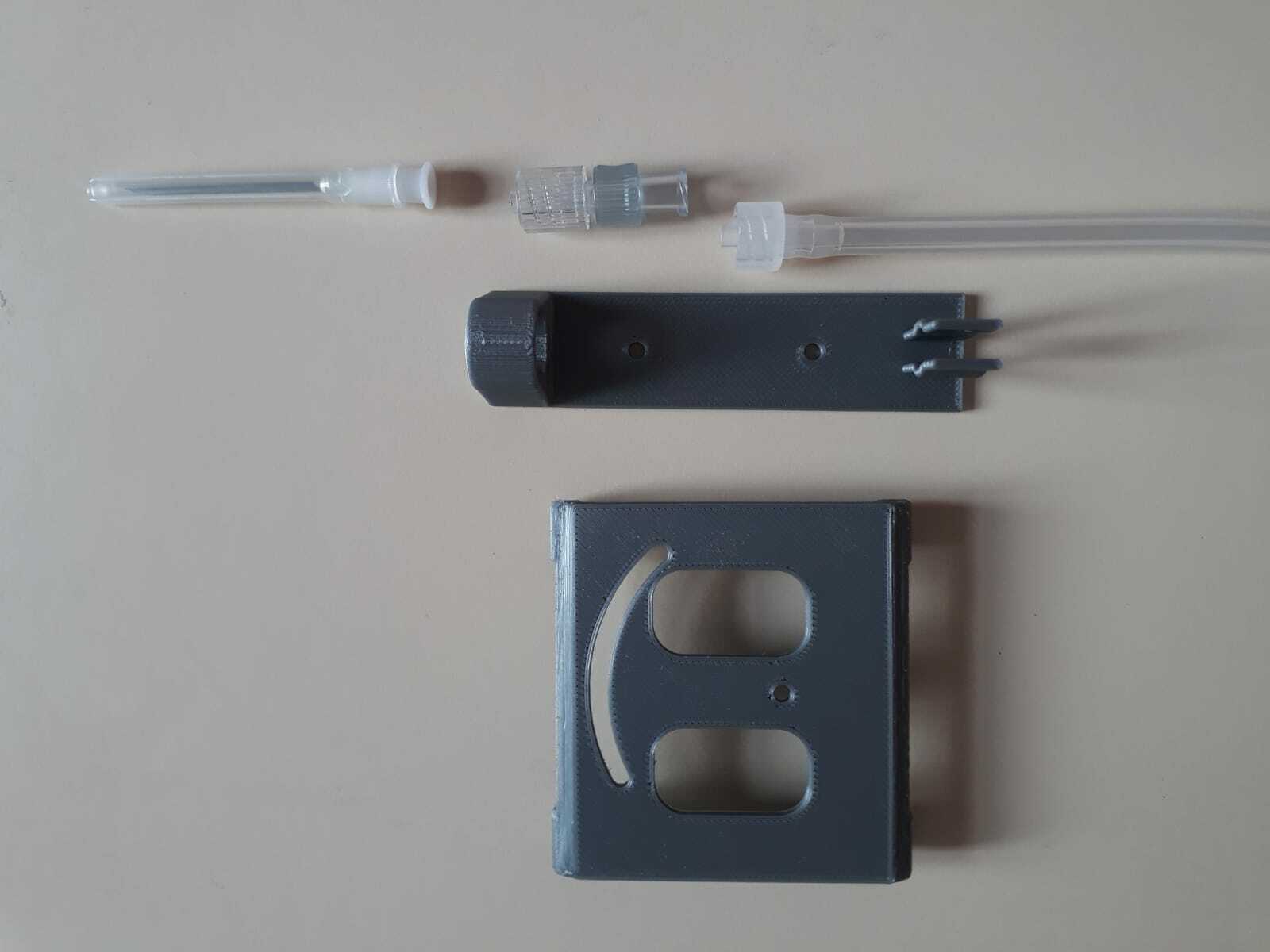
Assembly of the needle Holder¶
Below is illustrated the (very simple) assembly process for the needle holder:


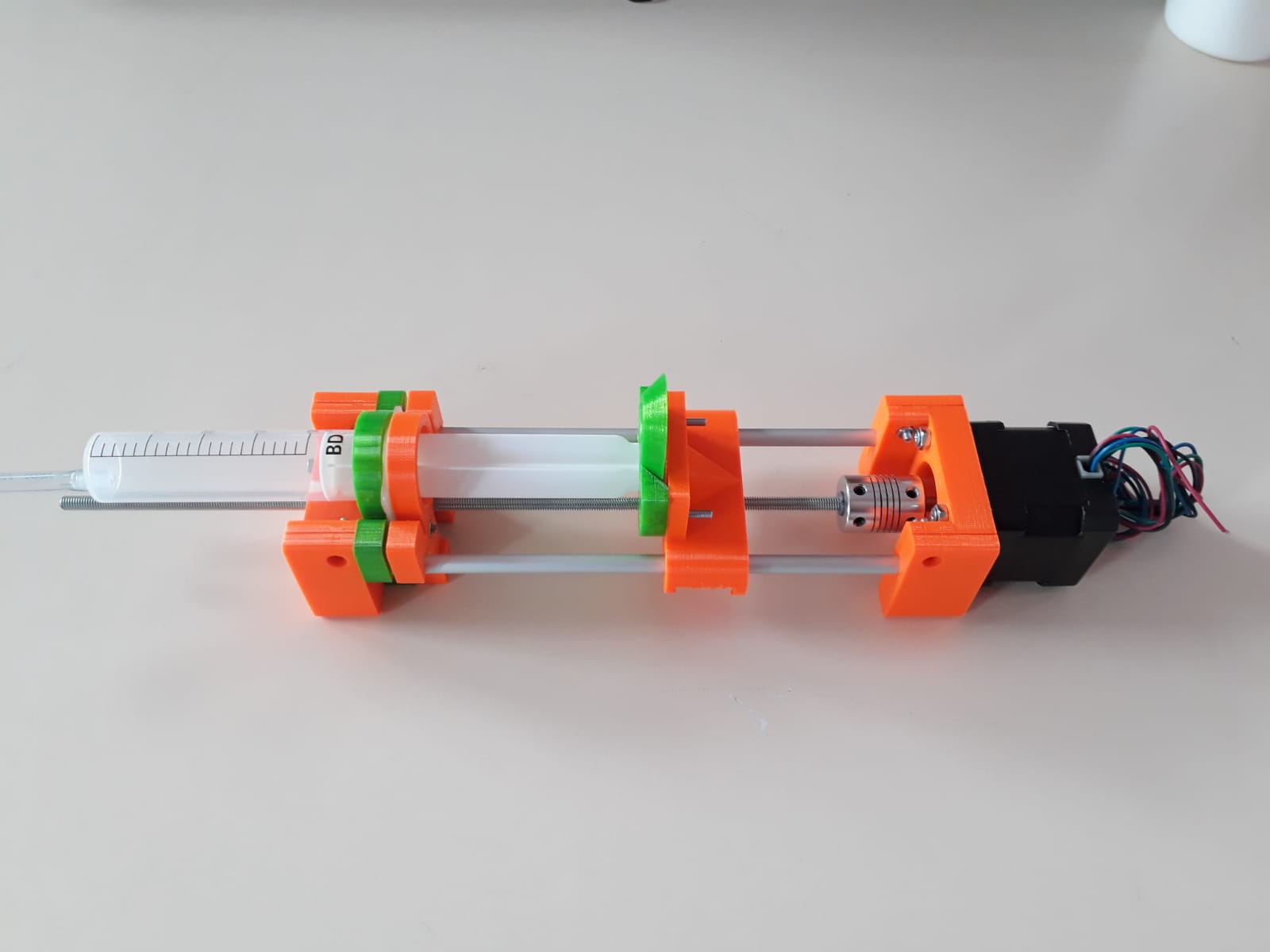
Syringe pump¶
The syringe pump assembly process is well documented here and quite simple. Here is an image of the assembled syringe pump:
Mechanical tests¶
4xiDraw¶
Syringe pump¶
We tested the syringe pump by actating the shaft manually: It works perfectly!