Final Project - Development: LAMPBOT
The Final Week was came. Was time to build the project and pray that all skills I gained during fab academy give desired results.
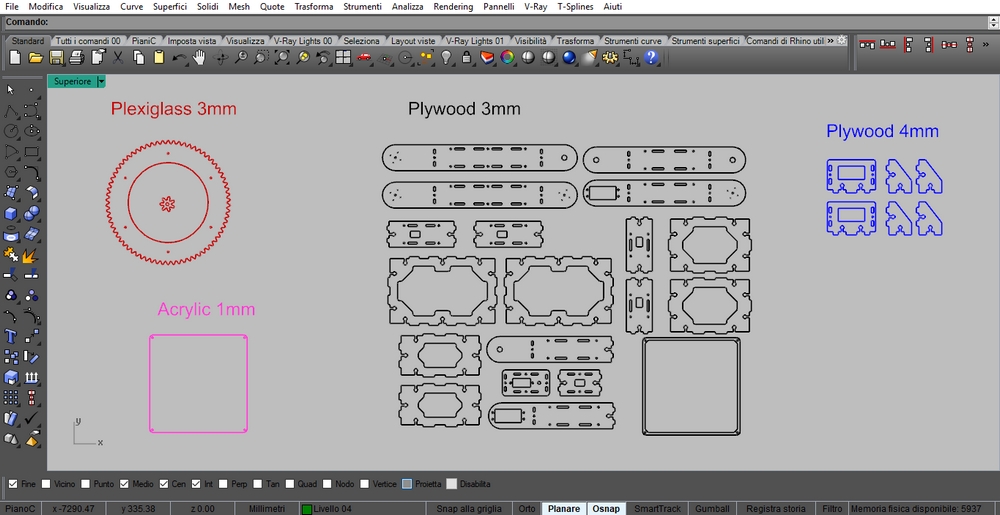
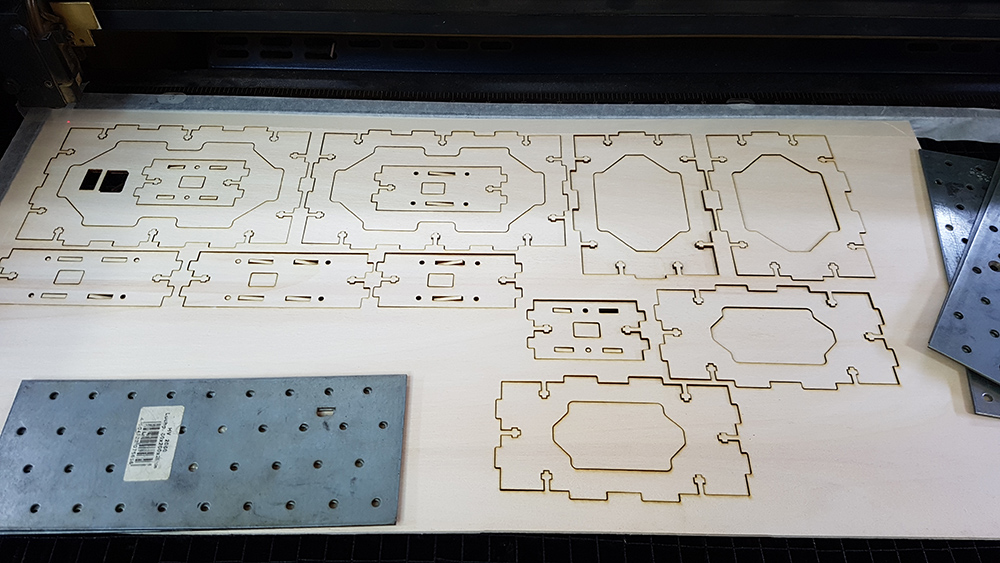
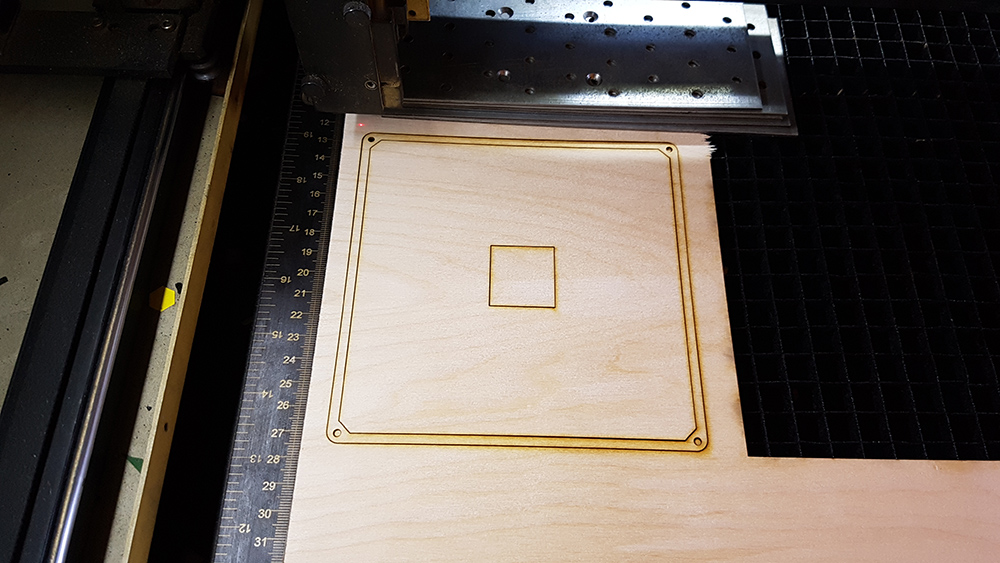
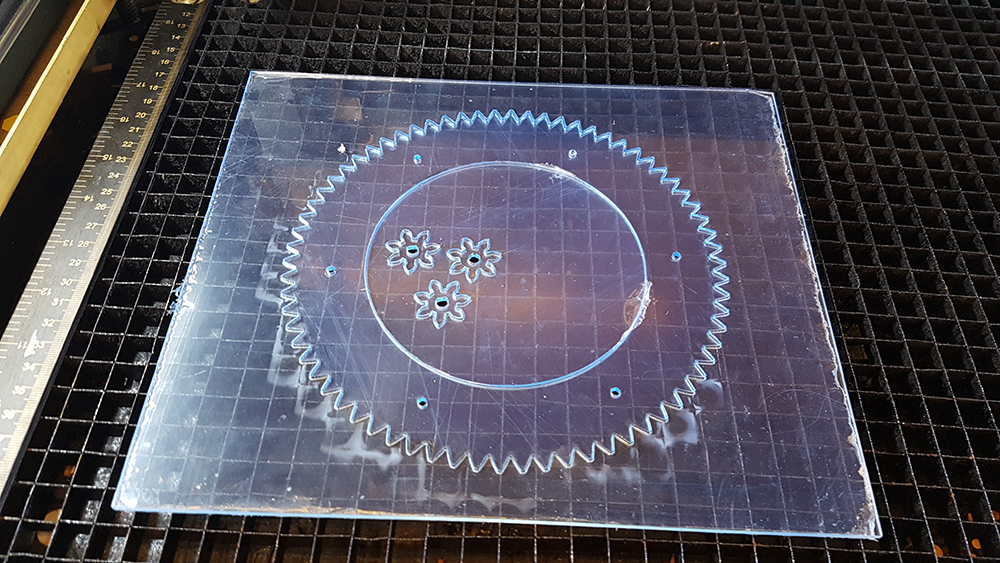
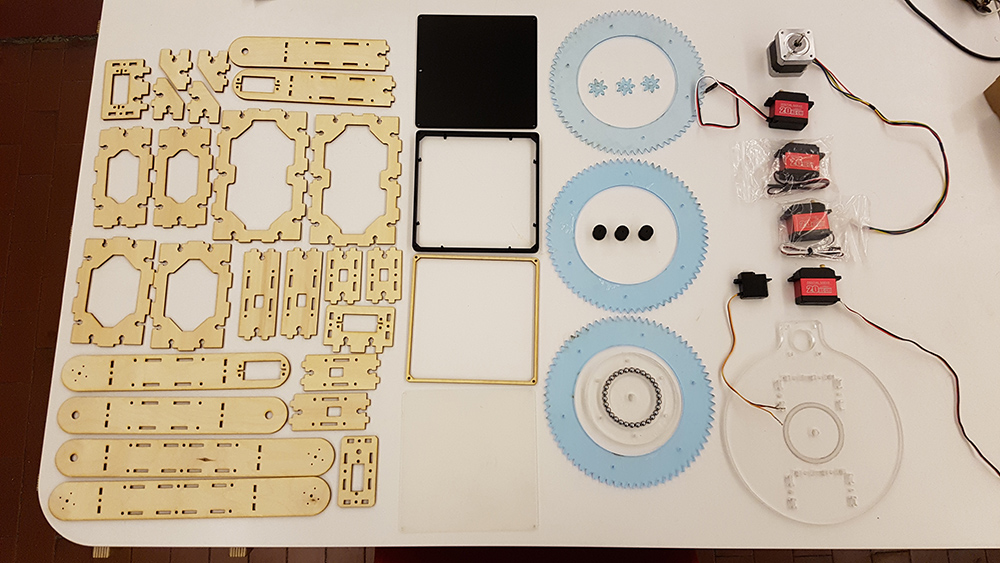
I prepared the dxf files in Rhino and I started to cut the pieces of my lamp's frame on the lasercut. I used 3 mm plywood for lamp frame, 4 mm plywood for the the pieces of servo motor holders at the base. Then I used 3mm plexiglass for gears and 1 mm opaline acrylic for the diffuser. I cut 3 pieces for each gear to reach 9 mm thickness.
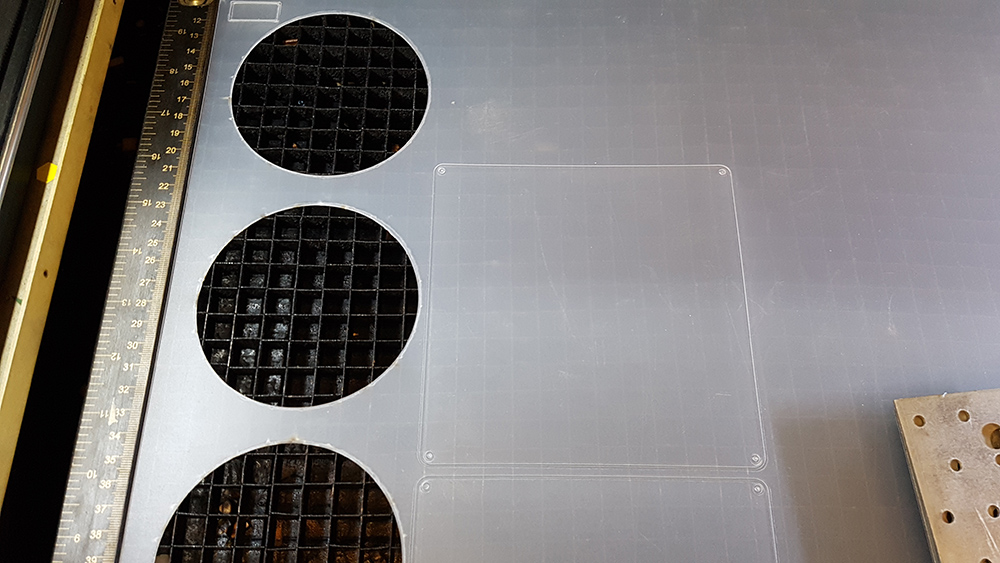
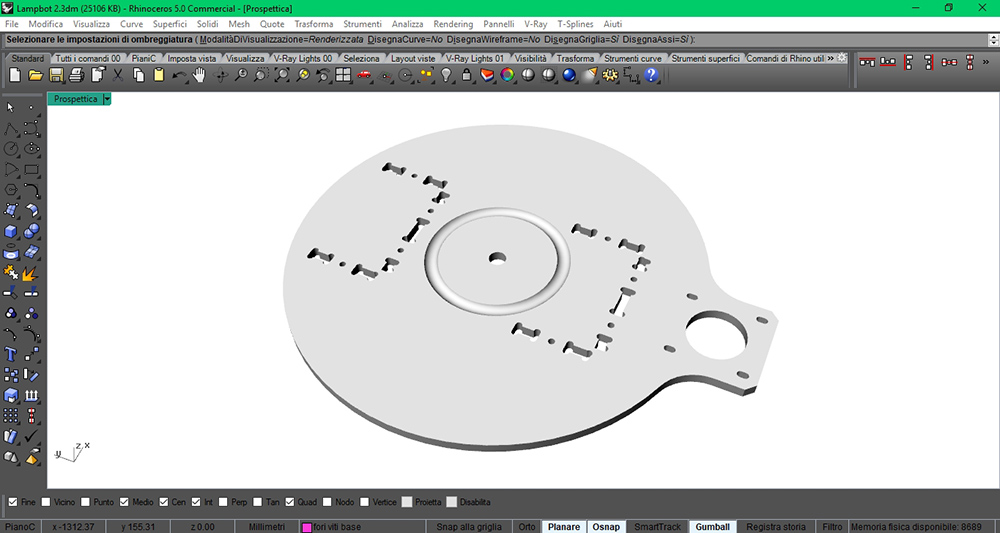
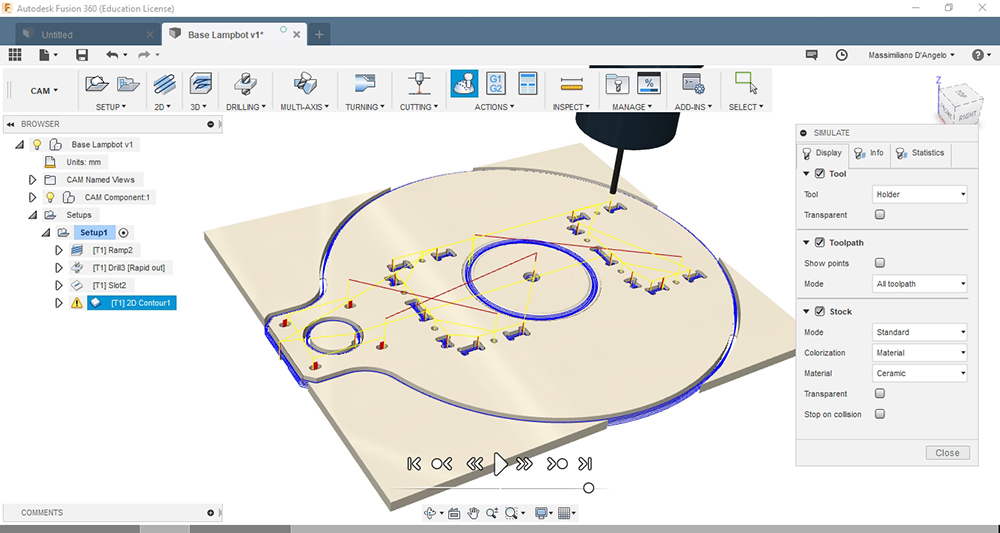
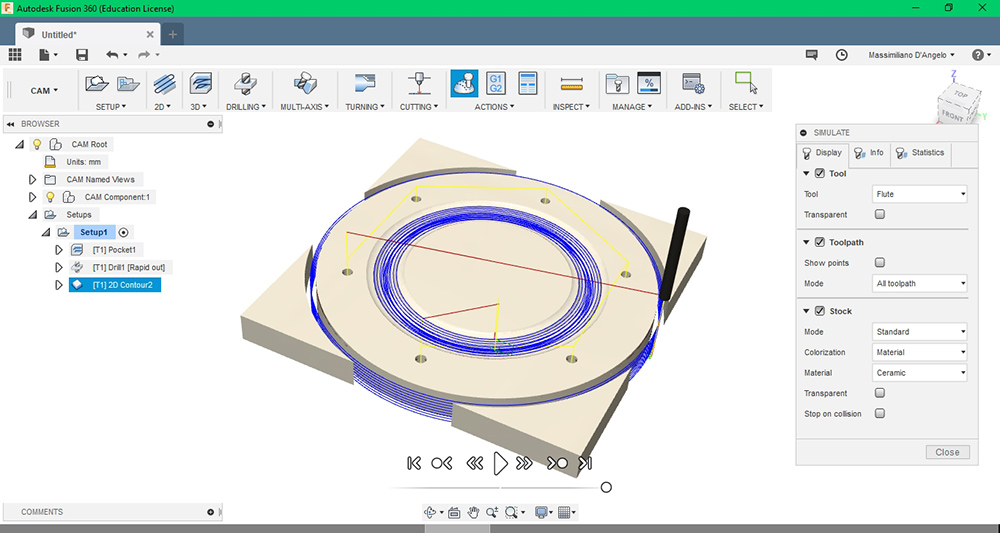
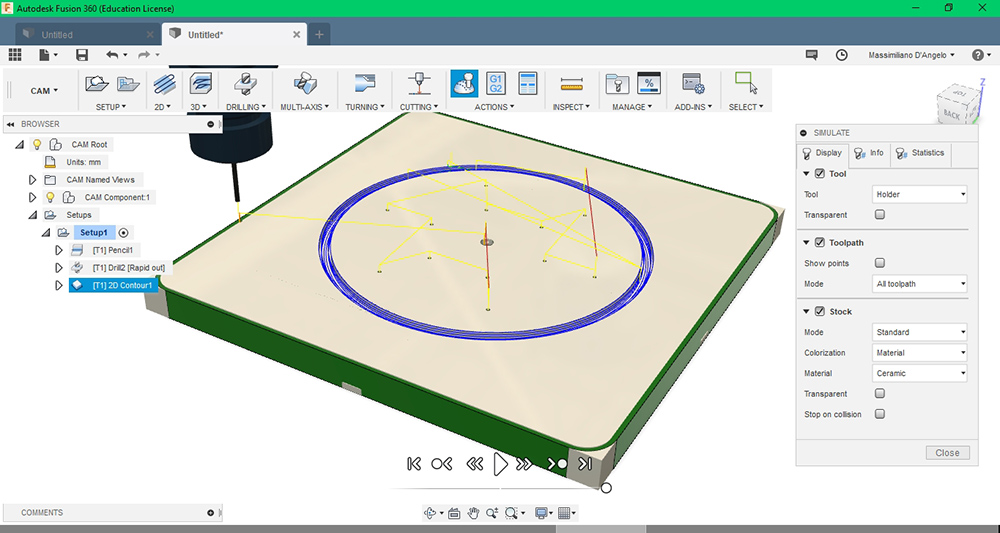
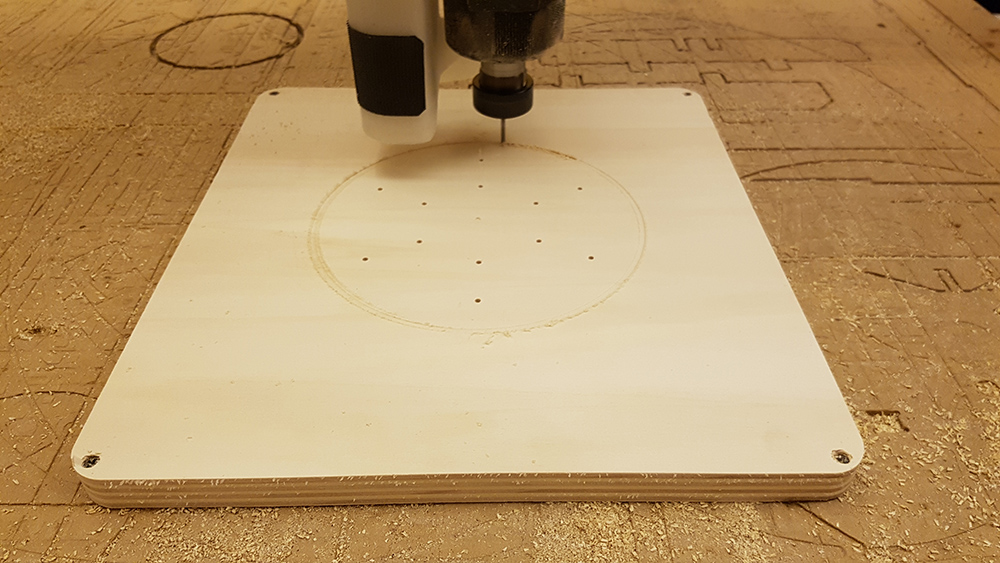
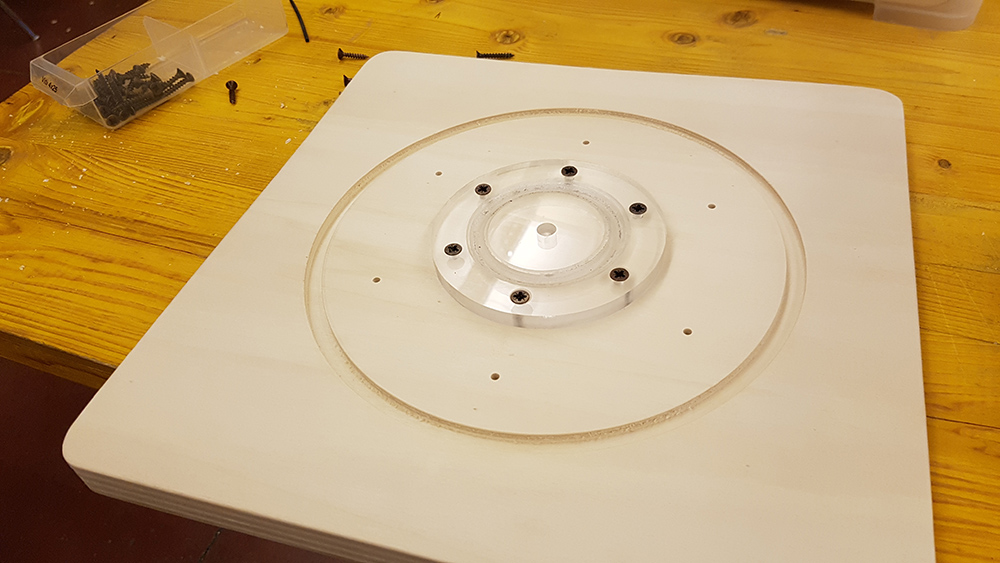
In order to avoid buy expensive bearing, I decided to build one by myself. I prepared on fusion the cam processes for the milling on Shopbot. I bought steel spheres with 6,35mm diameter, and I milled a circular groove on the two parts of the base, with plexiglass 8 mm thick. I used water to avoid overheating of the tool.


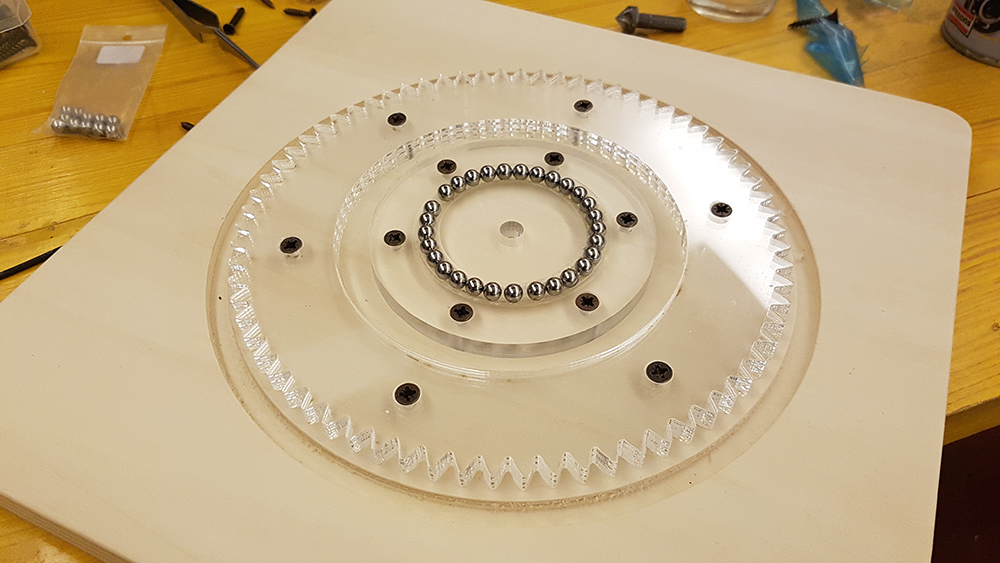
With spheres it worked perfectly.

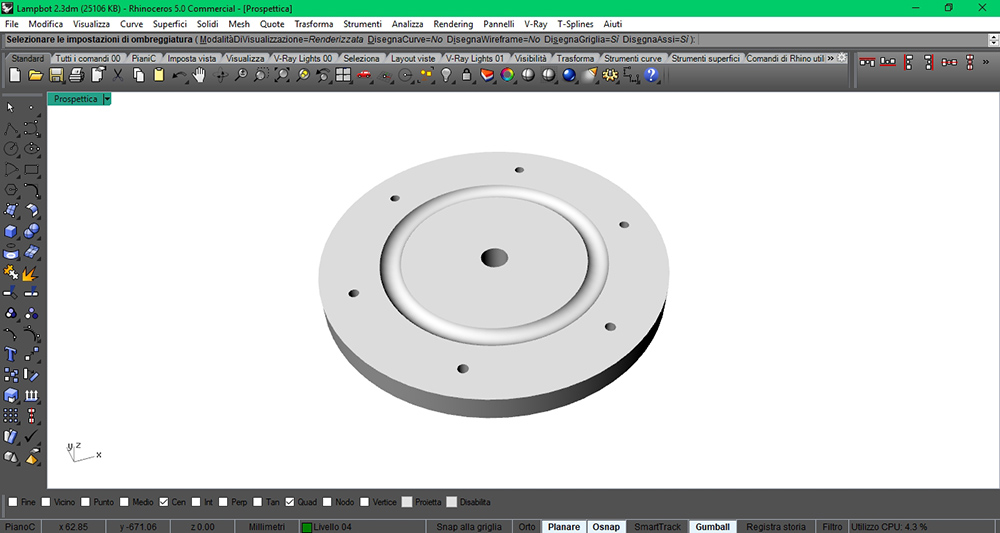
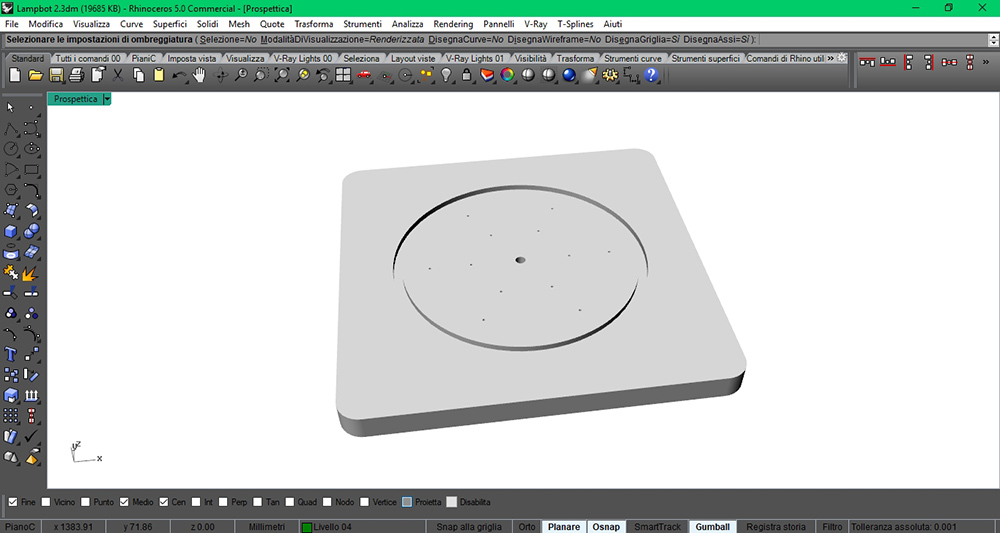
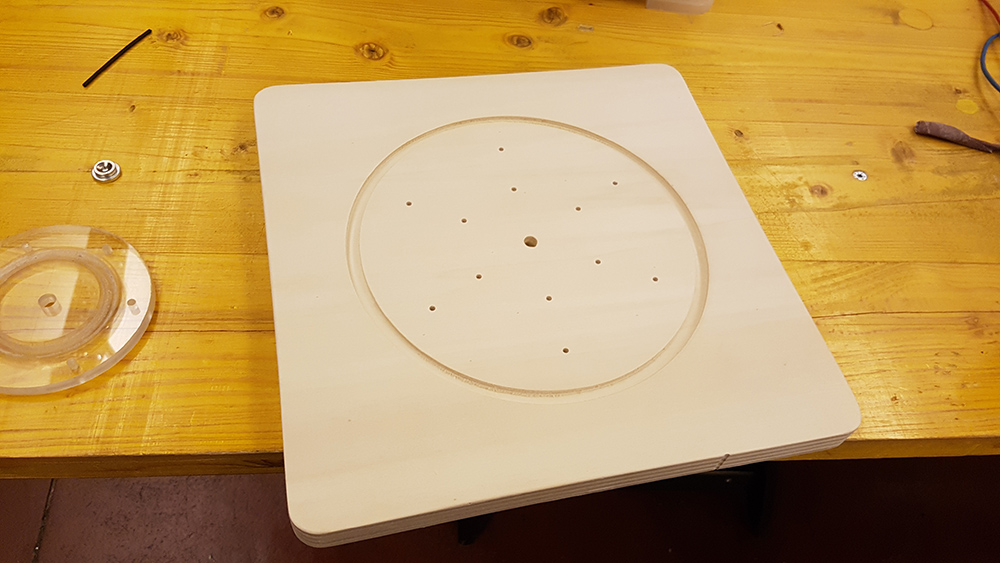
Then I milled the fixed base on the 20 mm wood.
Now was time to print the diffuser and the hinges.
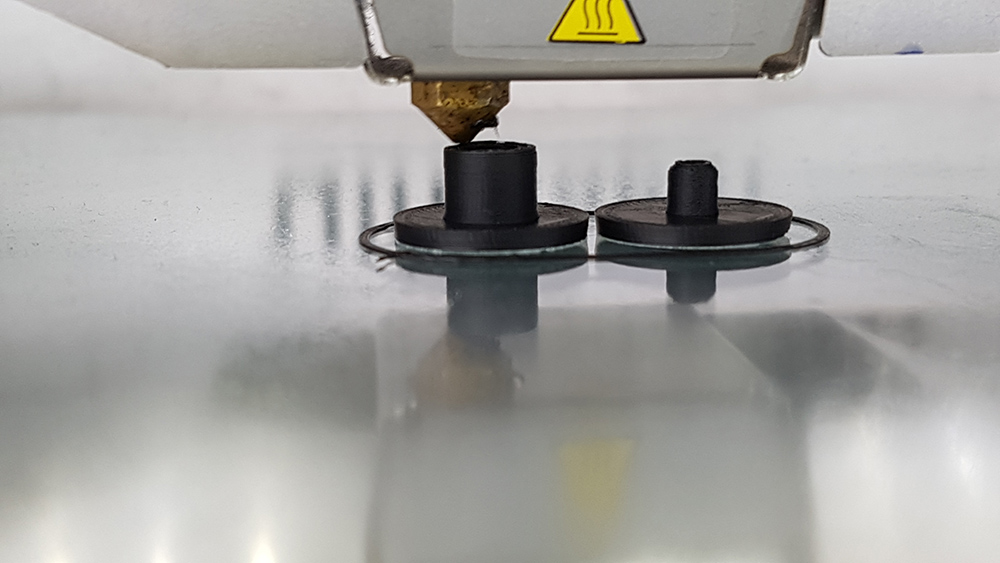
At this point I had almost all the parts to build the lamp.
I started to assembly from the base. I mounted on it the lower part of bearing and the bigger gear.

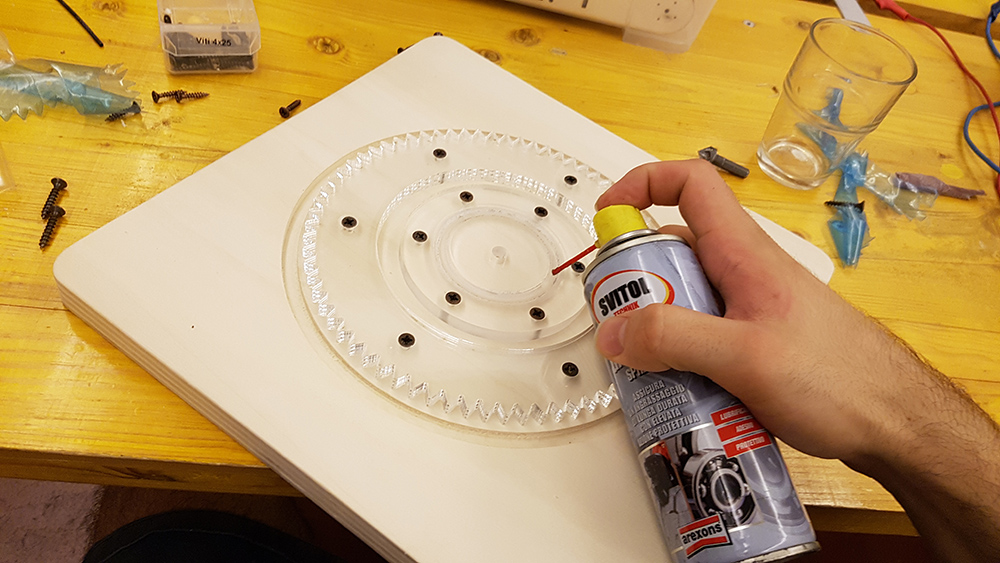
Then I added some grease compatible with plastic and put spheres inside the grooves and
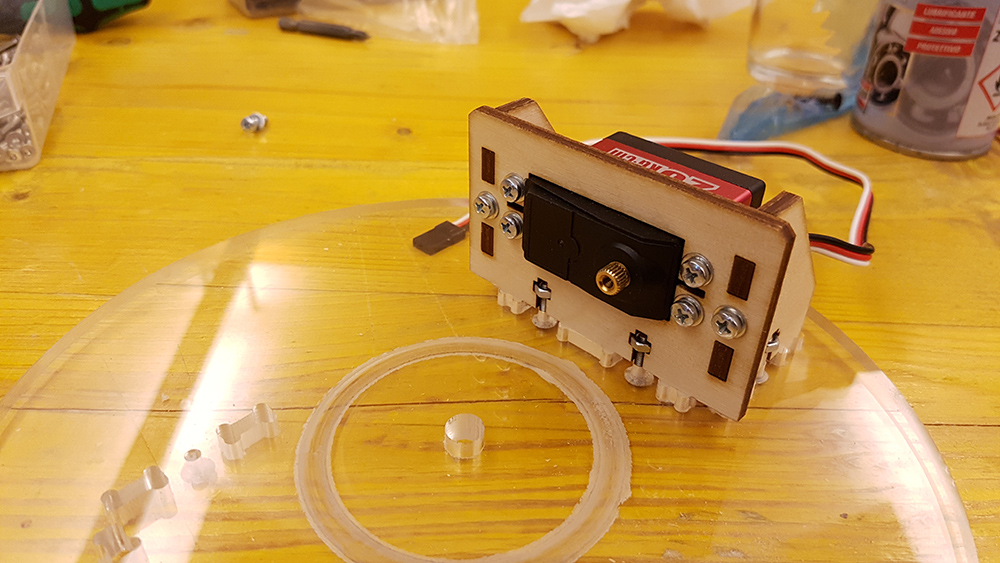
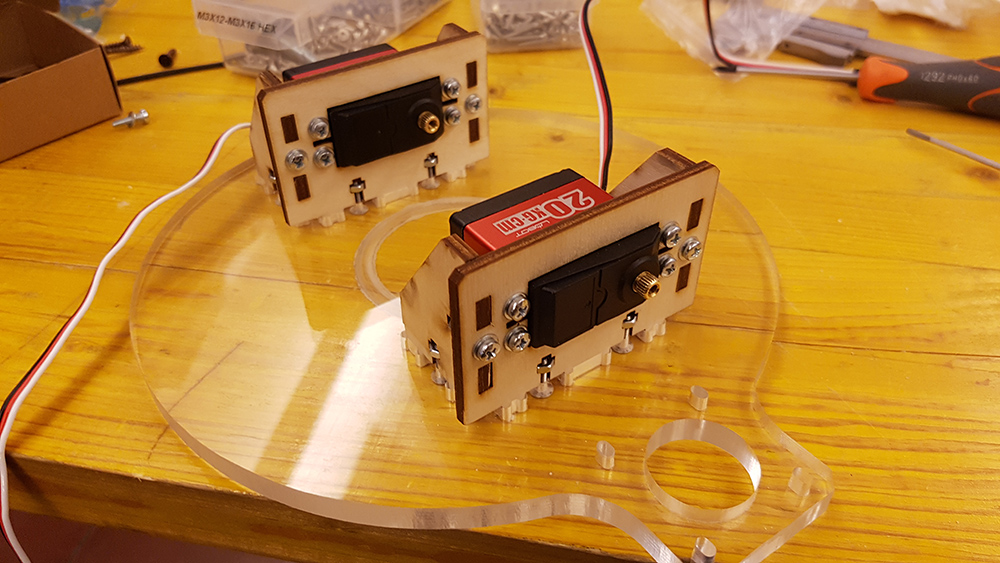
After fixed base, i aseembled the first servo motor holders on the revolving plate at the base.
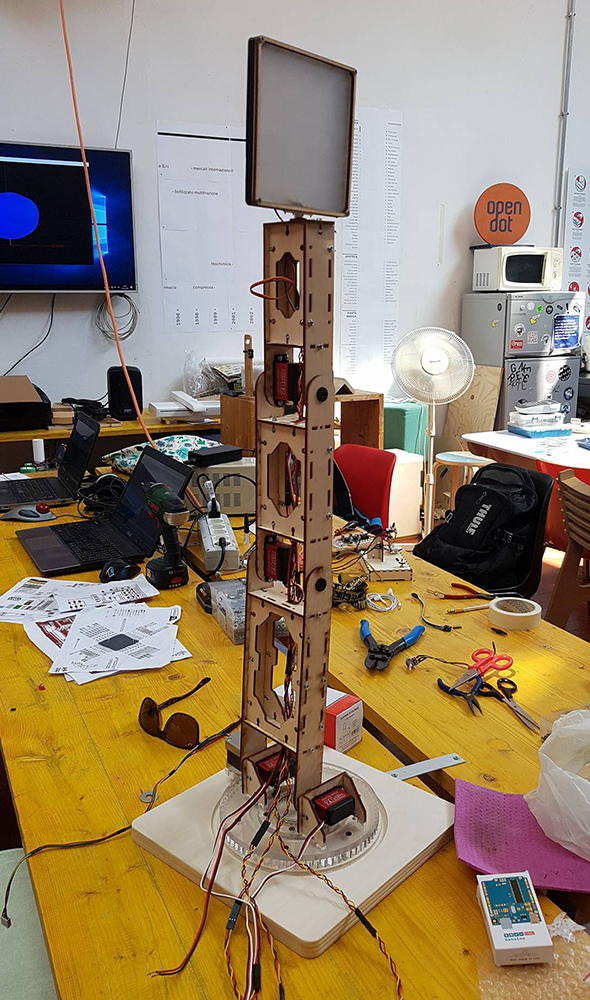
I continued assembling the frame of lamp.

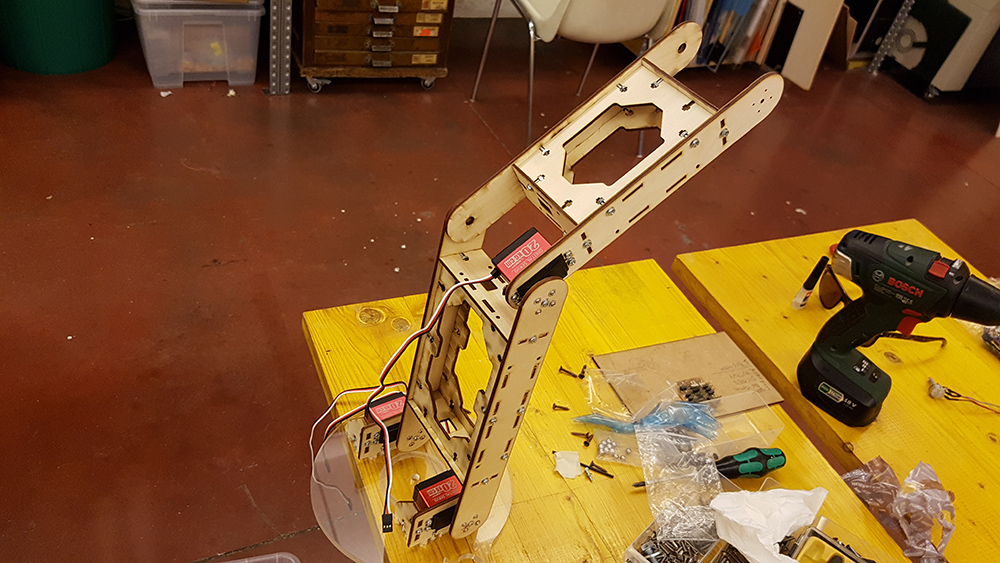
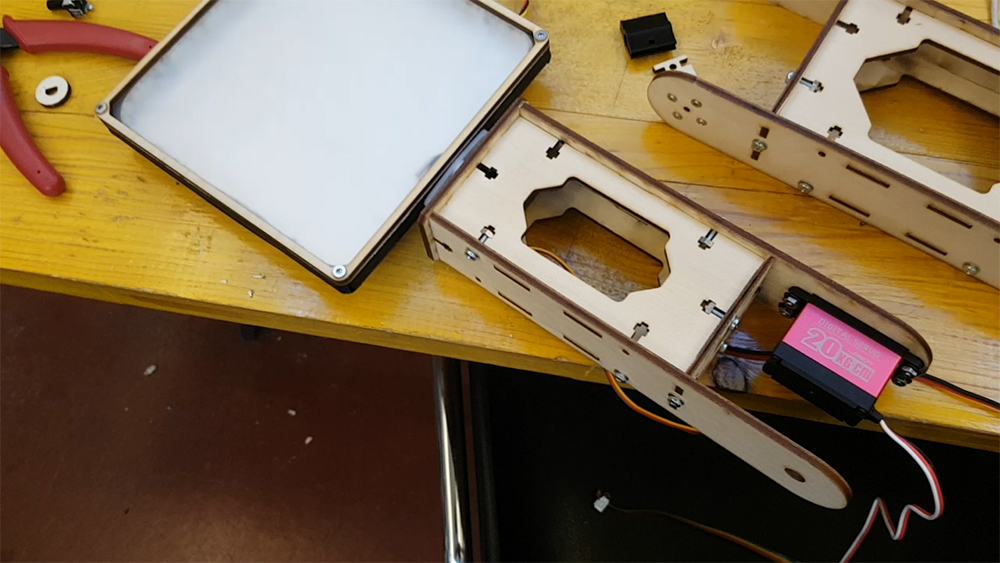
The last arm of lamp, support the diffuser of lamp. So I assembled it apart.
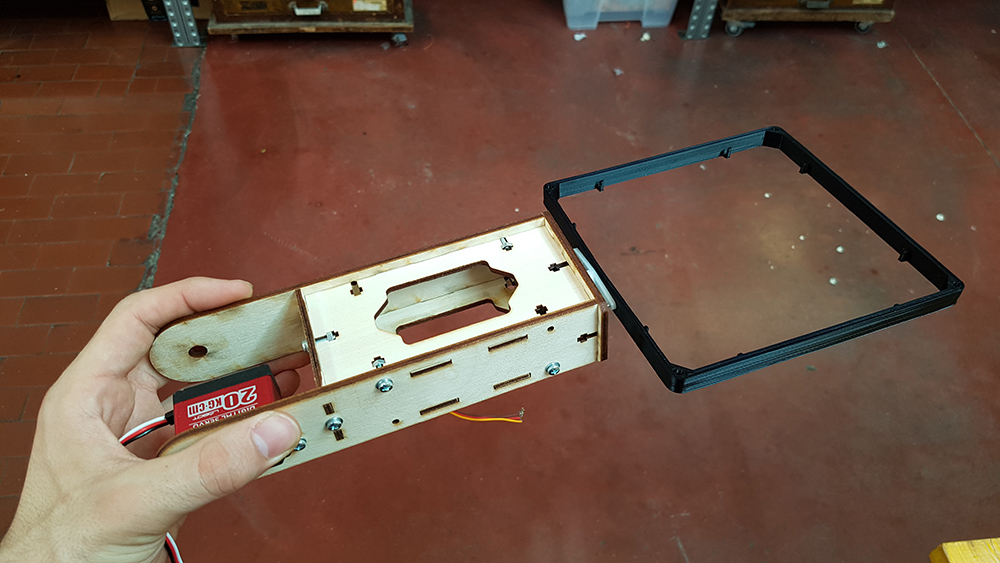

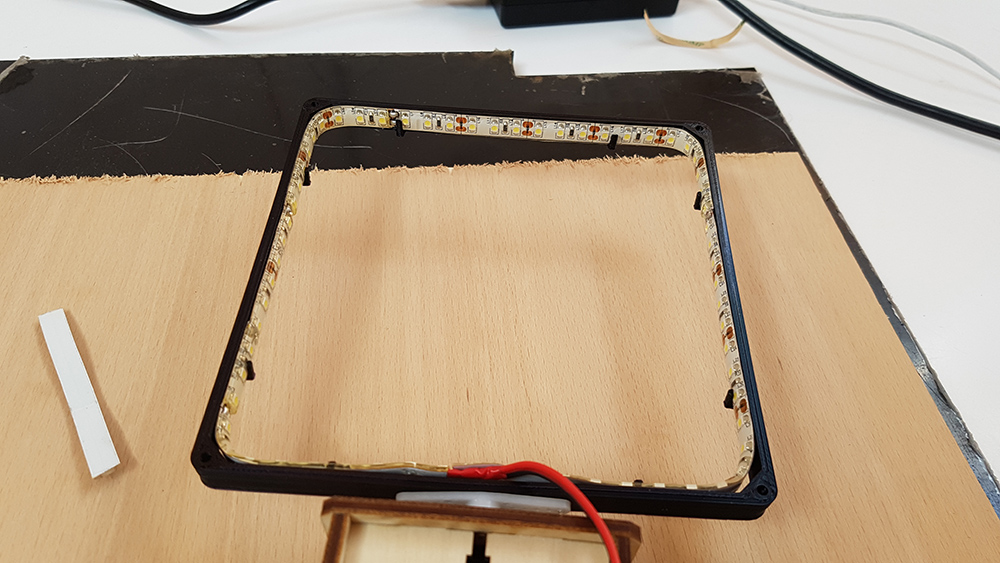
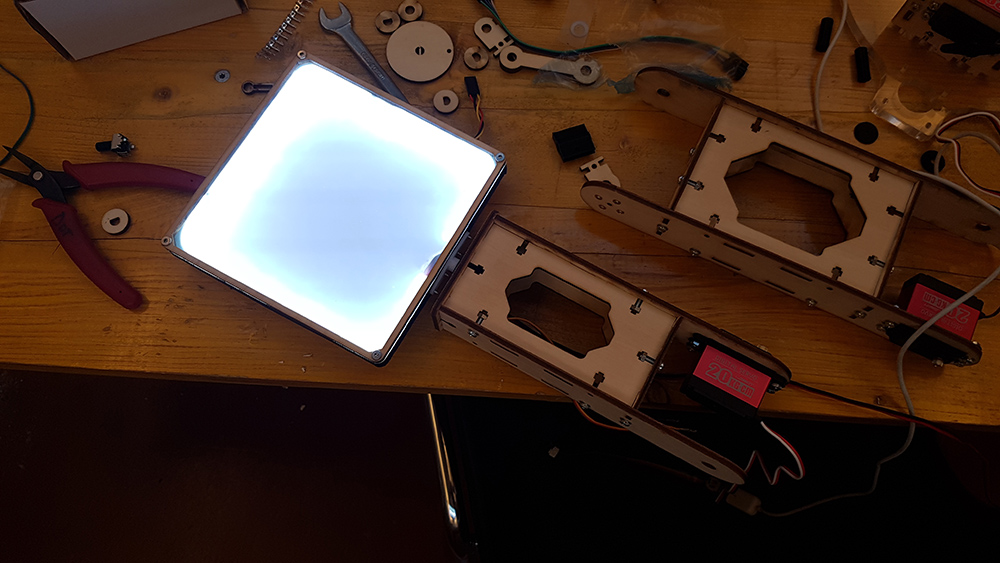
On the frame of diffuser I attached the stripled. I used the system that is used in LED panel tecnology. That allow me to obtain a soft and uniform light, very close to a little soft box effect. So I put the opaline acrylic piece on the front of the diffuser.
{kind=link}

Then I made a test to see if LEDs work well. I connect to power supply and... I had the light!!!
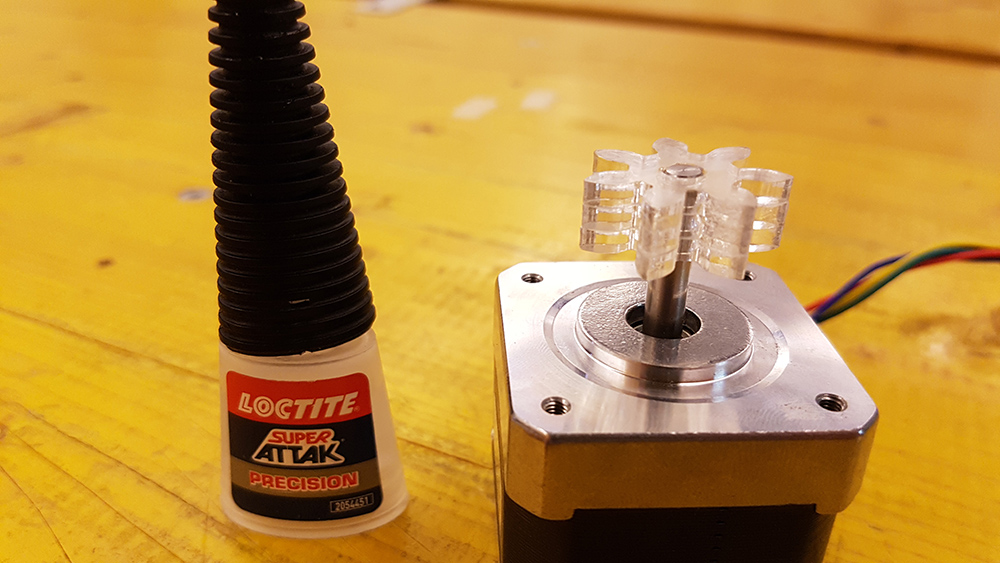
At last I glued the small gear pieces and put them on the stepper.
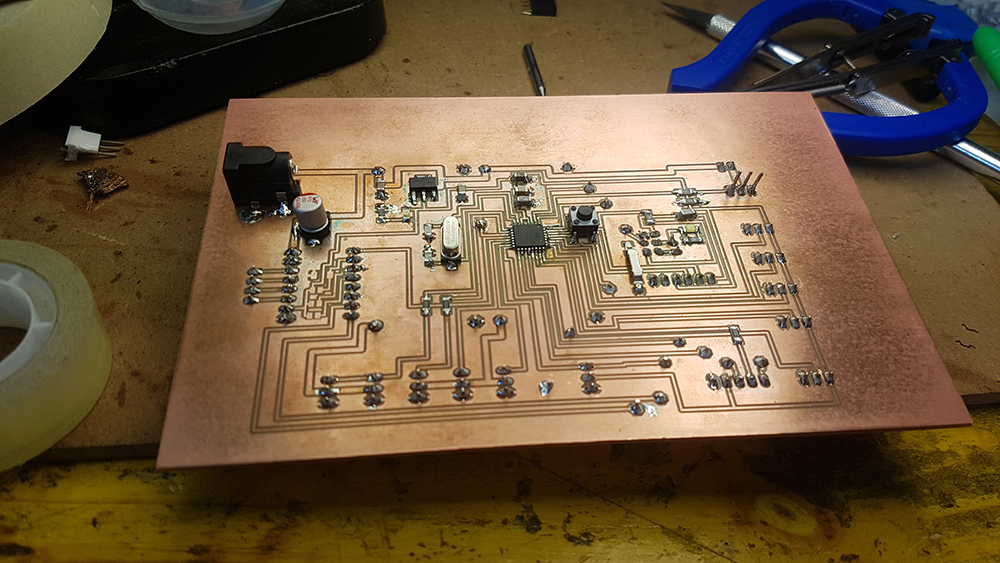
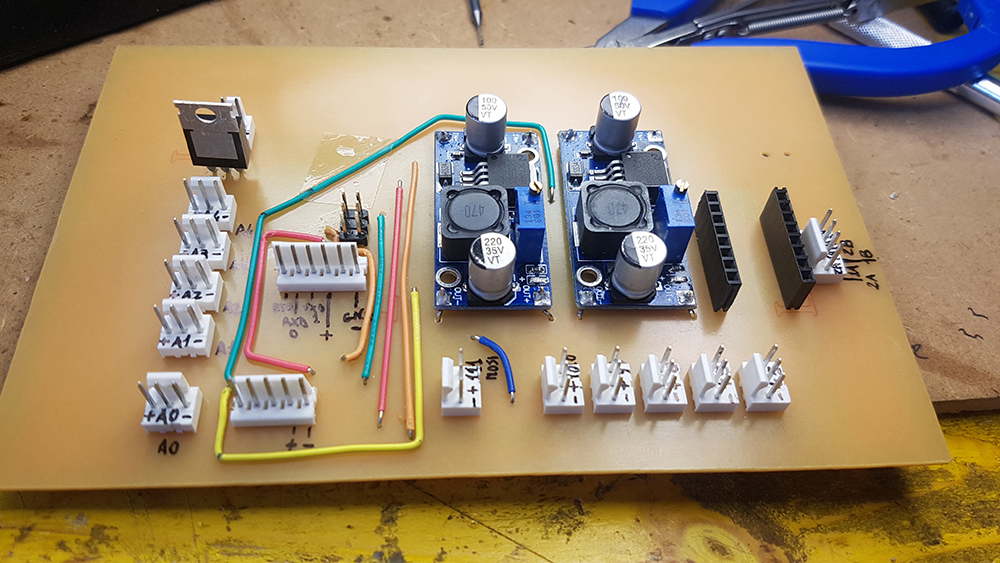
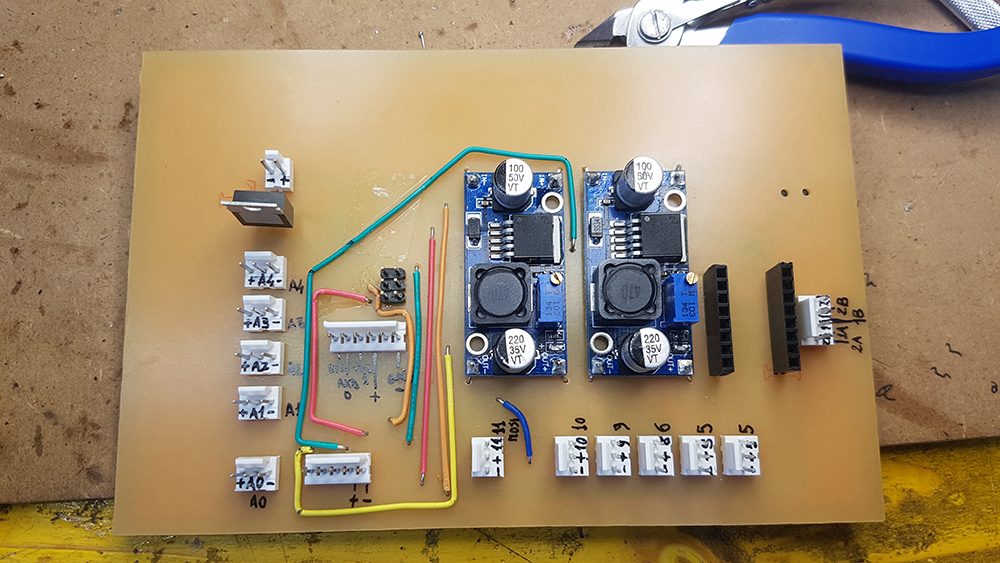
Now was time to made the electronic board. I designd it in Eagle, by this time I was a very expert in Electronic design. I start from satshakit by Daniele Ingrassia. I choose to use through hole pin header connectors, because they are more resistant that smd ones. I used both the faces od the PCB. On the face with copper layer I put all smd components and the reset button and status and power LED. On the other side face I put all the connectors and the DC /DC converters, so that i can use just this face for all the connections. I needed DC/DC connectors because the servos works at 6,5 Volts and have absorption peaks until to 1.0 Ah when i quickly change the direction of rotation. So I buyed two LM2596 DC/DC converter that can reduce voltage from an input 4 - 35 V to an output 1.23 - 30 V and support until to 3 Ah. I setted them to work at 6,5 Volts, that was a good tension for my Servos.
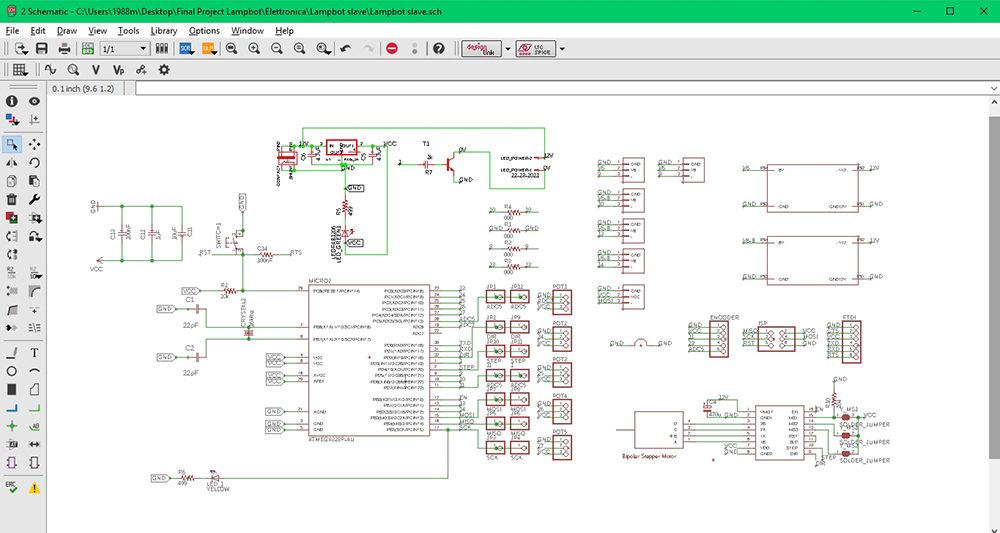
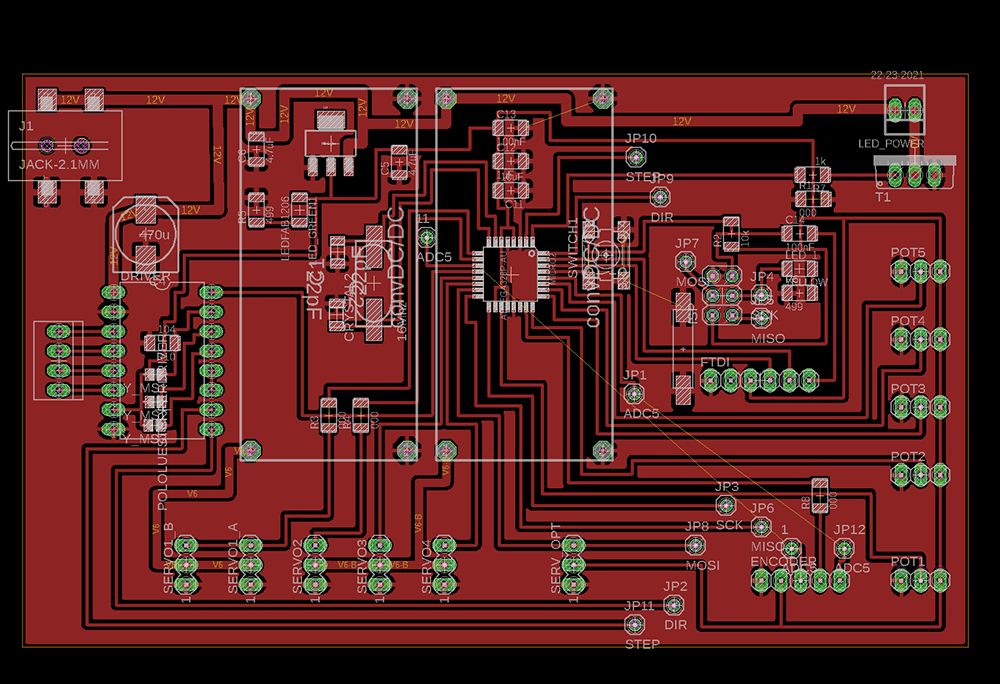
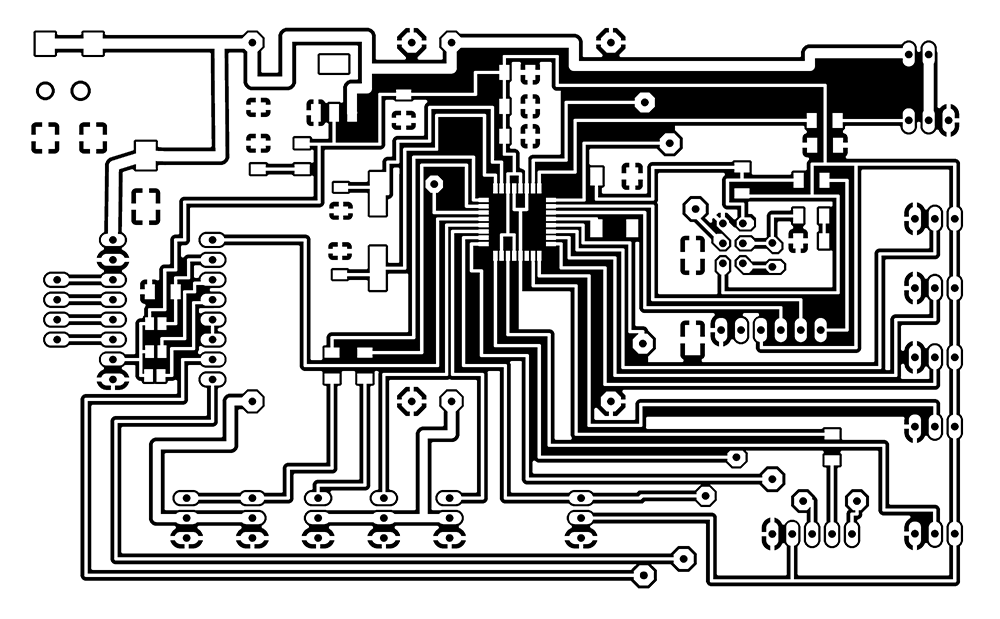
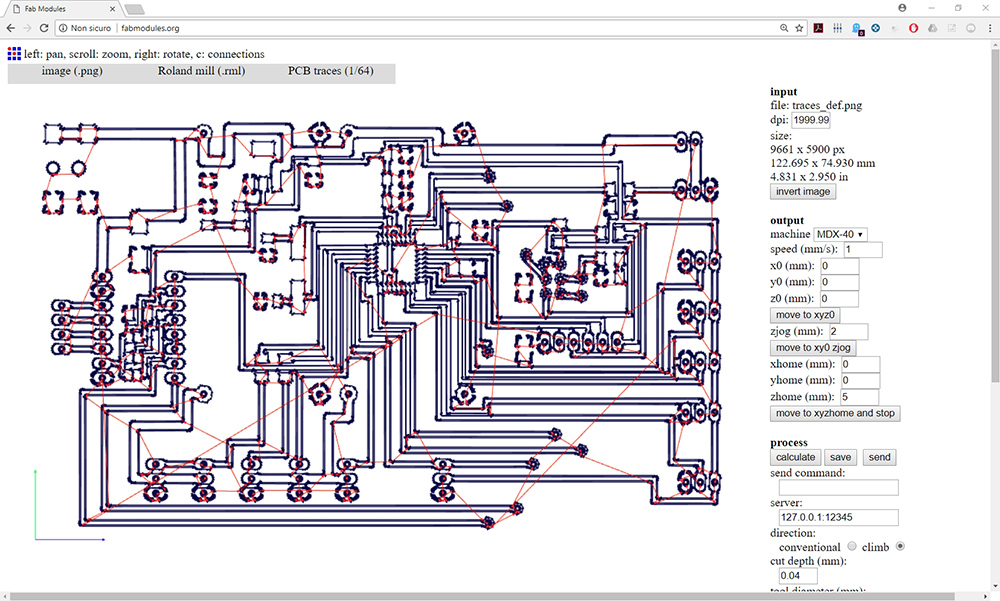
Then I processed it on fab modules and milled it on the Roland MDX-40. I had a great result.
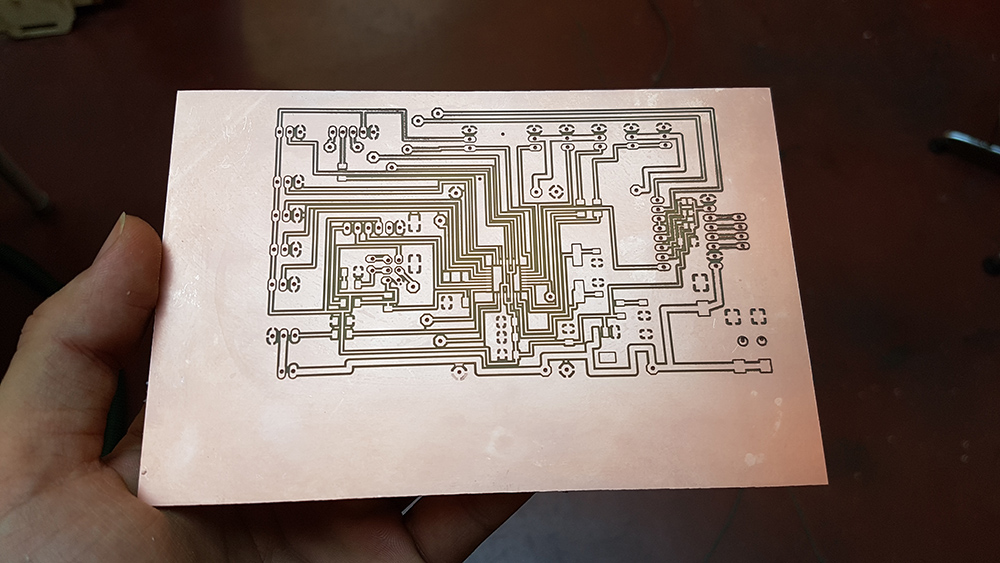
Finally I started soldering all the components.
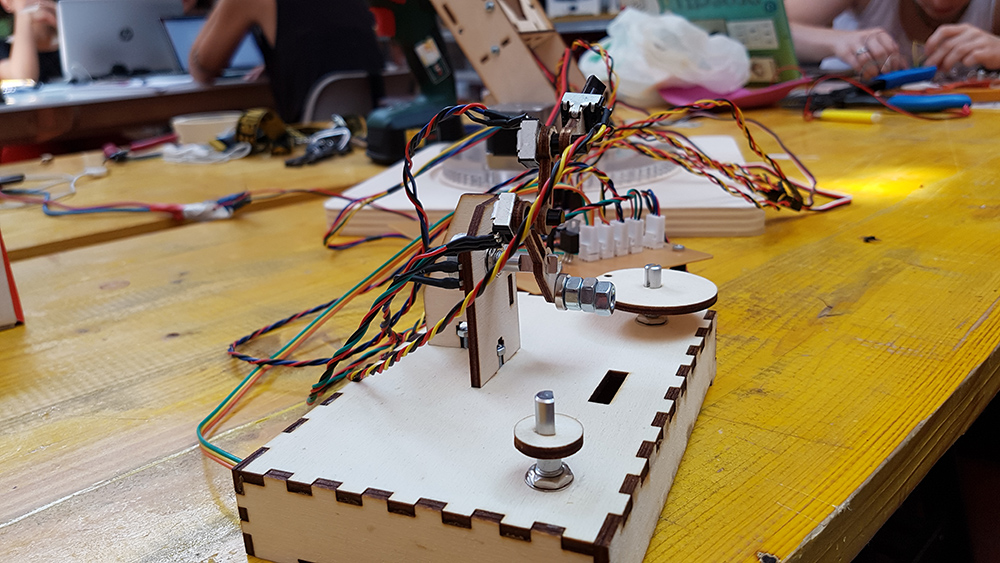
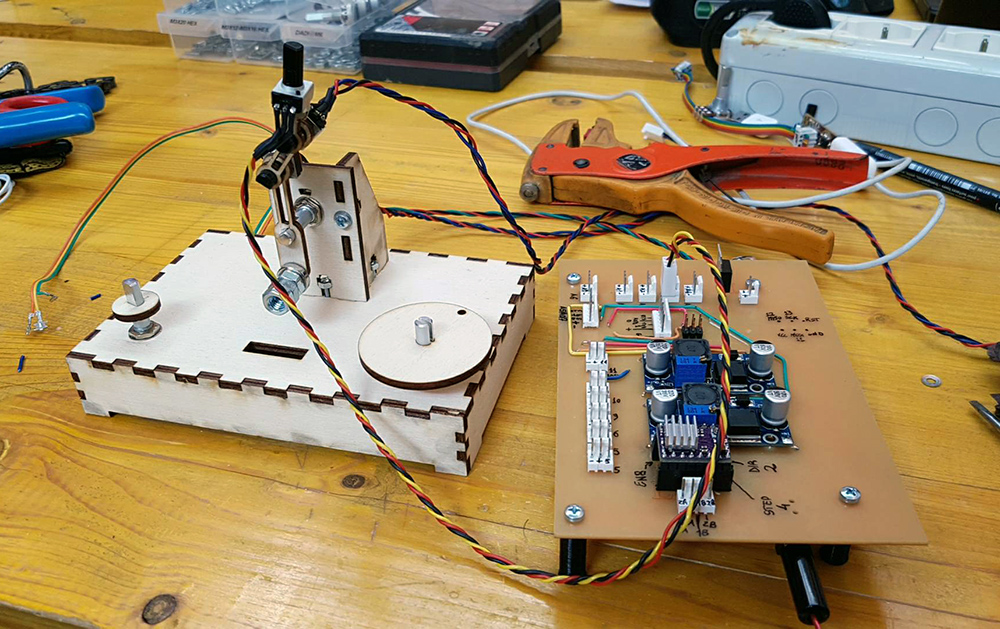
After that, I designed the controller. I used the same linkage and proportion between arms as on the lamp, but here I put potentiometers in the revolving joint, so that moving it i can move the lamp in the same way. The potentiometers had a very low friction, so I needed to design the arm linkage very very light. on the first arm i put some nuts as counterweights, to mantein the position when you remove your hand by the controller. On the box of controller i put a wheel for the potentiometer that control the LED brightness and an encoder for the stepper position on the base.
After that I start to write the code. I was able to write a code for controll Servos and the LED, and another one for controll the stepper. They work well when uploaded stand alone on mictrocontroller. Unfortunately I didn't find the way to match the two codes in a single one, but i know I can solve this problem using "millis" variable instead of "delay" and creating an interrupt in which run the encoder script. In the future I will develop this part.
Here the code of Encoder
#define stepPin 4
#define dirPin 2
#define outputA A0
#define outputB A5
int counter = 0;
int angle = 0;
int aState;
int aLastState;
void setup() {
// Sets the two pins as Outputs
pinMode(stepPin,OUTPUT);
pinMode(dirPin,OUTPUT);
pinMode (outputA,INPUT);
pinMode (outputB,INPUT);
aLastState = digitalRead(outputA);
}
void loop() {
aState = digitalRead(outputA);
if (aState != aLastState){
if (digitalRead(outputB) != aState) {
counter ++;
angle ++;
rotateCW();
}
else {
counter--;
angle --;
rotateCCW();
}
if (counter >=30 ) {
counter =0;
}
}
aLastState = aState;
}
void rotateCW() {
digitalWrite(dirPin,LOW);
digitalWrite(stepPin,HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin,LOW);
delayMicroseconds(2000);
}
void rotateCCW() {
digitalWrite(dirPin,HIGH);
digitalWrite(stepPin,HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin,LOW);
delayMicroseconds(2000);
}
And here the code for control servos and LED, reading potentiometers
#include
Servo myservo1;
Servo myservo2;
Servo myservo3;
Servo myservo4;
Servo myservo5;
Servo myservo6;
int potpin = A6;
int potpin1 = A1;
int potpin2 = A2;
int potpin3 = A3;
int potpin4 = A4;
int knobvalue;
int val;
void setup()
{ pinMode(3, OUTPUT);
myservo1.attach(5);
myservo2.attach(6);
myservo3.attach(9);
myservo4.attach(10);
}
void loop()
{
knobvalue = analogRead(potpin4);
knobvalue = map(knobvalue, 0, 1023, 0, 255);
analogWrite(3, knobvalue);
val = analogRead(potpin);
val = map(val, 0, 1023, 0, 250);
myservo1.write(val);
delay(15);
val = analogRead(potpin1);
val = map(val, 0, 1023, 0, 250);
myservo2.write(val);
delay(15);
val = analogRead(potpin2);
val = map(val, 0, 1023, 0, 250);
myservo3.write(val);
delay(15);
val = analogRead(potpin3);
val = map(val, 0, 1023, 0, 250);
myservo4.write(val);
delay(15);
}
At the end I assembled all the lamp and connected the cables, I programmed the board and the lamp worked very great, with my great satisfaction :D .
Video:
Download
You can download DXF files here:
You can download 3D files here:
You can download Eagle files here:
You can download Arduino codes here: