Update 2
• Final
Due to the budget limit which i didn’t realised at the very beginning. I have decide to make a new ‘fab academy’ version of my old balanced robot prototype.
This balanced robot prototype was build for racing purpose, thus everything is simplified to extreme. Most of stuff are cheap COTS product. The chassis is made from aluminium board and hold by copper spacer, screws and nuts.
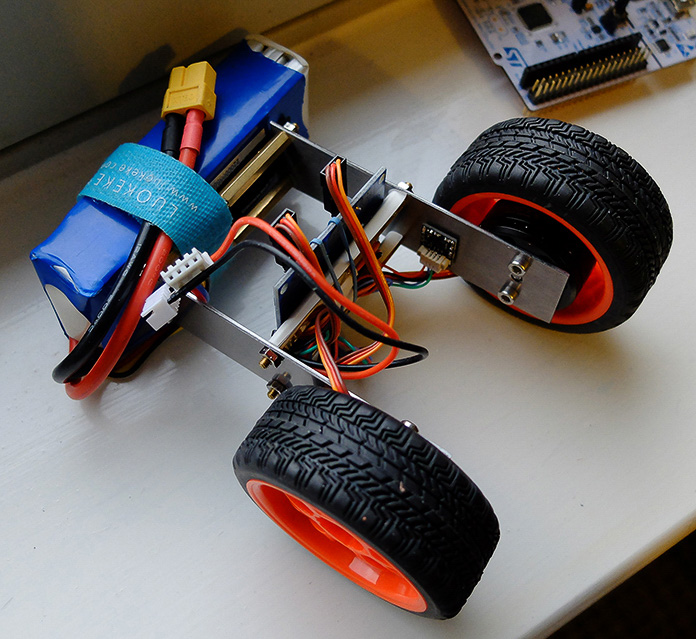
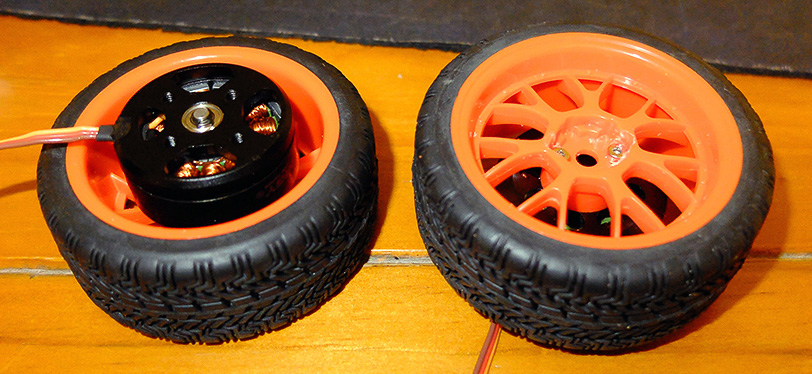
The soft 1/10th scale RC wheels would able to provide great grip on most of surface and damping after ‘airborne’. They are driven by BLDC Gimbal motor directly, shown as follow, which features high torque, fast and precise response.
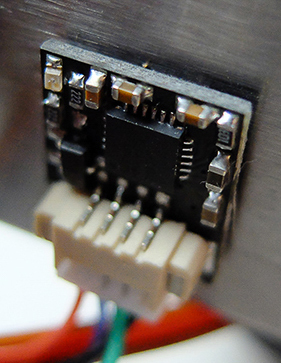
The IMU on this balanced robot is a very common MPU-6050 which comes with the brushless gimbal controller.
Due to the lackness of deadline for this race between my friend and me, this prototype can only stand with some help to find the initial balance point first. Therefore, for fab academy final project, the target is to build a new balanced robot that looks interesting and hopefully can actually be used for racing.
It would features:
-
a new 3D printed or carbon fiber composite body/chassis
-
new controller board that could connect to ESC for gimbal motor and accept input from both PWM and WIFI/Bluetooth
-
new software to make sure that the robot able to stand, walk and run
-
a funny look, for example, android robot