Update 1
• Final
My current plan for final project is a MYO controlled 4WD car. And it would allow conventional radio control for more fun.
The rear wheels are driven by BLDC motors directly for a higher top speed. The electronic speed controller (ESC) for them are specially design multicopter ESCs with reverse direction supported.
The front wheels would be driven by special BLDC motors designed for gimbals. This motor features high torque which is necessary for start. The front wheels and motors are connected via a single direction bearing to reduce the drag after start.
Therefore, the car is front wheel drive during the start and rear wheel drive after start.
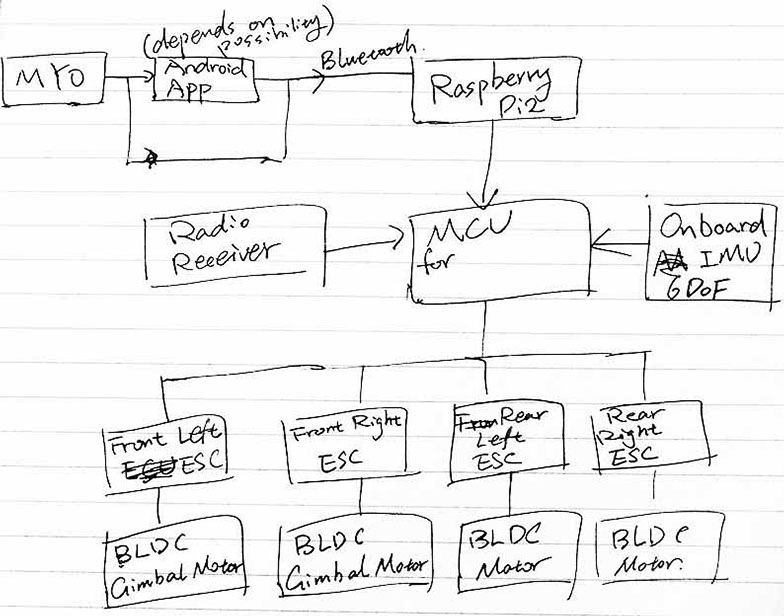
A on-board 6DOF inertial measurement unit (IMU) is used for stability and traction control, apply the break to each wheel when necessary.
All wheel would be fitted with a simple push-rod suspension for better handling.
Overall, this would be a miniature version of modern hypercars, with a lot of fancy electronic systems.
A simple block diagram show below. (which i forgot to add the steering after MCU)