Input device
TouchpaD_01 / Step Response

This weekly assignment is about measure something: adding a sensor to a microcontroller board that I have designed and read it.
I was interested in step response input and I focused on both the tutorials about the Touchpad and the Capacitive Multitouch to understand the general mechanism and go ahead with my input board.
Design & Making
I started designing my TouchpaD step response input pcb updating the Hello Echo board. The process was super simple: I just added a very high resistor (10 M Ohm) to the schematics making PA3 as input step pin and PA2 as response reference pin in the ATtiny44 microcontroller.
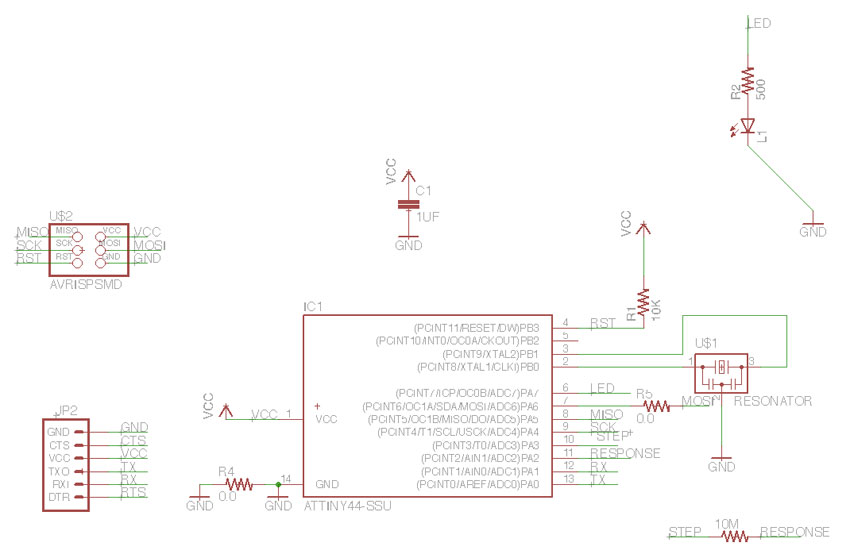
Below the components necessary for the TouchPad board and their related Eagle libraries:
01_FAB_Hello library
- 6pin programming header (PINHD-2x3-SMD Description: PIN HEADER)
- microcontroller attiny44A (ATTINY44-SSU Description: SOIC14)
- Resistor (value 10k / RESISTOR1206/Description: 1206)
- Resistor (value 10 M / RESISTOR1206/Description: 1206)
- Button/6MM_SWITCH6MM_SWITCH Description OMRON SWITCH)
- Ground/GND/Supply symbol
- VCC/Supply Symbol
- LED/LED1206/description 1206
01_SparkFun Library
- FTDI header (ARDUINO_SERIAL_PROGRAMSMD /ARDUINO_SERIAL_PROGRAM)/Description: 1X06-SMD
- 20MHz resonator (RESONATOR SMD)
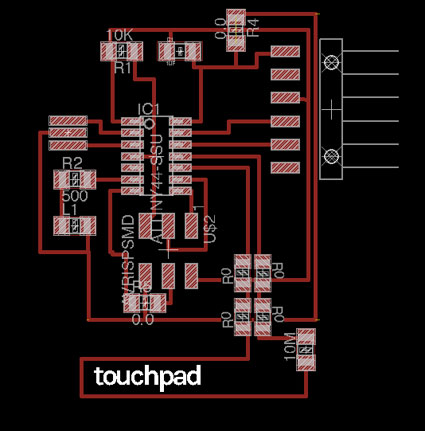
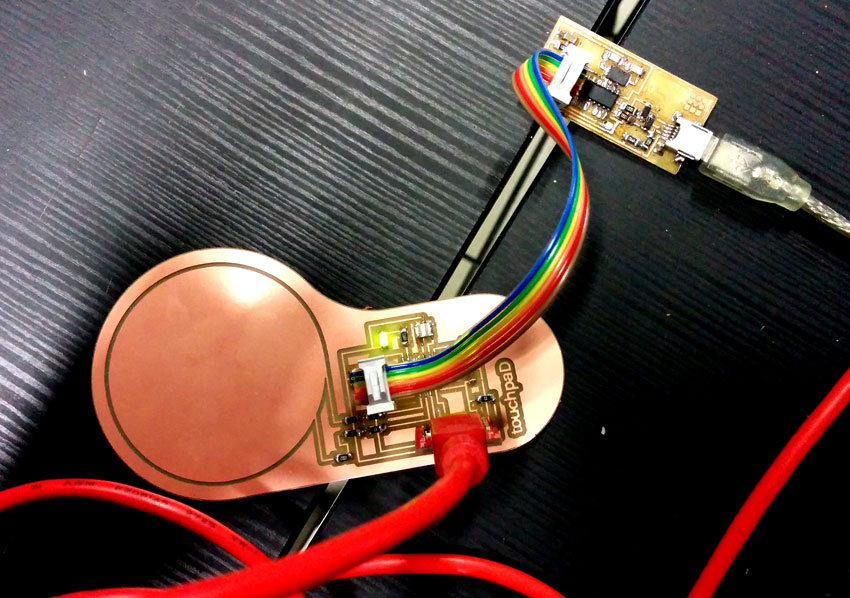
I then milled the board using FabModules settings and the ModelaMDX15 and also soldered components following the Hello Echo board stuffing.

Programming the board
I first downloaded the hello.load.45.c Neil's code and modified the pin setup definition according to my schematics. Then I created the makefile and run in terminal avr dude commands.
make -f hello.load.45.make
make -f hello.load.45.make program_usbtiny_fuses
make -f hello.load.45.make program_usbtiny
hello.load.45.c
//
// hello.load.45.c
//
// step response loading hello-world
// 9600 baud FTDI interface
//
// Neil Gershenfeld
// 10/27/10
//
// (c) Massachusetts Institute of Technology 2010
// This work may be reproduced, modified, distributed,
// performed, and displayed for any purpose. Copyright is
// retained and must be preserved. The work is provided
// as is; no warranty is provided, and users accept all
// liability.
//
#include
#include
#define output(directions,pin) (directions |= pin) // set port direction for output
#define set(port,pin) (port |= pin) // set port pin
#define clear(port,pin) (port &= (~pin)) // clear port pin
#define pin_test(pins,pin) (pins & pin) // test for port pin
#define bit_test(byte,bit) (byte & (1 << bit)) // test for bit set
#define bit_delay_time 102 // bit delay for 9600 with overhead
#define bit_delay() _delay_us(bit_delay_time) // RS232 bit delay
#define half_bit_delay() _delay_us(bit_delay_time/2) // RS232 half bit delay
#define charge_delay_1() _delay_us(1) // charge delay 1
#define charge_delay_2() _delay_us(10) // charge delay 2
#define charge_delay_3() _delay_us(100) // charge delay 3
#define settle_delay() _delay_us(100) // settle delay
#define char_delay() _delay_ms(10) // char delay
#define serial_port PORTA
#define serial_direction DDRA
#define serial_pin_out (1 << PA1)
#define charge_port PORTA
#define charge_direction DDRA
#define charge_pin (1 << PA3)
void put_char(volatile unsigned char *port, unsigned char pin, char txchar) {
//
// send character in txchar on port pin
// assumes line driver (inverts bits)
//
// start bit
//
clear(*port,pin);
bit_delay();
//
// unrolled loop to write data bits
//
if bit_test(txchar,0)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,1)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,2)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,3)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,4)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,5)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,6)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,7)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
//
// stop bit
//
set(*port,pin);
bit_delay();
//
// char delay
//
bit_delay();
}
int main(void) {
//
// main
//
static unsigned char up_lo,up_hi,down_lo,down_hi;
//
// set clock divider to /1
//
CLKPR = (1 << CLKPCE);
CLKPR = (0 << CLKPS3) | (0 << CLKPS2) | (0 << CLKPS1) | (0 << CLKPS0);
//
// initialize output pins
//
set(serial_port, serial_pin_out);
output(serial_direction, serial_pin_out);
clear(charge_port, charge_pin);
output(charge_direction, charge_pin);
//
// init A/D
//
ADMUX = (0 << REFS1) | (0 << REFS0) // Vcc ref
| (0 << ADLAR) // right adjust
| (0 << MUX4) | (0 << MUX3) | (0 << MUX2) | (1 << MUX1) | (0 << MUX0); // PA2
ADCSRA = (1 << ADEN) // enable
| (1 << ADPS2) | (1 << ADPS1) | (1 << ADPS0); // prescaler /128
//
// main loop
//
while (1) {
//
// send framing
//
put_char(&serial_port, serial_pin_out, 1);
char_delay();
put_char(&serial_port, serial_pin_out, 2);
char_delay();
put_char(&serial_port, serial_pin_out, 3);
char_delay();
put_char(&serial_port, serial_pin_out, 4);
//
// settle, charge, and wait 1
//
settle_delay();
set(charge_port, charge_pin);
charge_delay_1();
//
// initiate conversion
//
ADCSRA |= (1 << ADSC);
//
// wait for completion
//
while (ADCSRA & (1 << ADSC)){
// niente
}
//
// save result
//
up_lo = ADCL;
up_hi = ADCH;
//
// settle, discharge, and wait 1
//
settle_delay();
clear(charge_port, charge_pin);
charge_delay_1();
//
// initiate conversion
//
ADCSRA |= (1 << ADSC);
//
// wait for completion
//
while (ADCSRA & (1 << ADSC))
;
//
// save result
//
down_lo = ADCL;
down_hi = ADCH;
//
// send result
//
put_char(&serial_port, serial_pin_out, up_lo);
char_delay();
put_char(&serial_port, serial_pin_out, up_hi);
char_delay();
put_char(&serial_port, serial_pin_out, down_lo);
char_delay();
put_char(&serial_port, serial_pin_out, down_hi);
char_delay();
//
// settle, charge, and wait 2
//
settle_delay();
set(charge_port, charge_pin);
charge_delay_2();
//
// initiate conversion
//
ADCSRA |= (1 << ADSC);
//
// wait for completion
//
while (ADCSRA & (1 << ADSC))
;
//
// save result
//
up_lo = ADCL;
up_hi = ADCH;
//
// settle, discharge, and wait 2
//
settle_delay();
clear(charge_port, charge_pin);
charge_delay_2();
//
// initiate conversion
//
ADCSRA |= (1 << ADSC);
//
// wait for completion
//
while (ADCSRA & (1 << ADSC))
;
//
// save result
//
down_lo = ADCL;
down_hi = ADCH;
//
// send result
//
put_char(&serial_port, serial_pin_out, up_lo);
char_delay();
put_char(&serial_port, serial_pin_out, up_hi);
char_delay();
put_char(&serial_port, serial_pin_out, down_lo);
char_delay();
put_char(&serial_port, serial_pin_out, down_hi);
char_delay();
//
// settle, charge, and wait 3
//
settle_delay();
set(charge_port, charge_pin);
charge_delay_3();
//
// initiate conversion
//
ADCSRA |= (1 << ADSC);
//
// wait for completion
//
while (ADCSRA & (1 << ADSC))
;
//
// save result
//
up_lo = ADCL;
up_hi = ADCH;
//
// settle, discharge, and wait 3
//
settle_delay();
clear(charge_port, charge_pin);
charge_delay_3();
//
// initiate conversion
//
ADCSRA |= (1 << ADSC);
//
// wait for completion
//
while (ADCSRA & (1 << ADSC))
;
//
// save result
//
down_lo = ADCL;
down_hi = ADCH;
//
// send result
//
put_char(&serial_port, serial_pin_out, up_lo);
char_delay();
put_char(&serial_port, serial_pin_out, up_hi);
char_delay();
put_char(&serial_port, serial_pin_out, down_lo);
char_delay();
put_char(&serial_port, serial_pin_out, down_hi);
char_delay();
}
}
As final step, to receive and display loading step response, I donwloaded the Neil's python code hello.load.45.py and the python serial monitor launching in the terminal this instruction:
python load.py /dev/cu.usbserial-A702U58D
01_FAB_Hello library
- 6pin programming header (PINHD-2x3-SMD Description: PIN HEADER) - microcontroller attiny44A (ATTINY44-SSU Description: SOIC14) - Resistor (value 10k / RESISTOR1206/Description: 1206) - Resistor (value 10 M / RESISTOR1206/Description: 1206) - Button/6MM_SWITCH6MM_SWITCH Description OMRON SWITCH) - Ground/GND/Supply symbol - VCC/Supply Symbol - LED/LED1206/description 120601_SparkFun Library
- FTDI header (ARDUINO_SERIAL_PROGRAMSMD /ARDUINO_SERIAL_PROGRAM)/Description: 1X06-SMD - 20MHz resonator (RESONATOR SMD)hello.load.45.c
// // hello.load.45.c // // step response loading hello-world // 9600 baud FTDI interface // // Neil Gershenfeld // 10/27/10 // // (c) Massachusetts Institute of Technology 2010 // This work may be reproduced, modified, distributed, // performed, and displayed for any purpose. Copyright is // retained and must be preserved. The work is provided // as is; no warranty is provided, and users accept all // liability. // #include
hello.load.45.py
# hello.load.45.py # # receive and display loading step response # hello.step.45.py serial_port # # Neil Gershenfeld # CBA MIT 10/29/10 # # (c) Massachusetts Institute of Technology 2010 # Permission granted for experimental and personal use; # license for commercial sale available from MIT # from Tkinter import * import serial WINDOW = 600 # window size eps = 0.5 # filter time constant filter1 = 0.0 # filtered value filter2 = 0.0 # filtered value filter3 = 0.0 # filtered value def idle(parent,canvas): global filter1, filter2, filter3, eps # # idle routine # byte2 = 0 byte3 = 0 byte4 = 0 ser.flush() # # find framing # while 1: byte1 = byte2 byte2 = byte3 byte3 = byte4 byte4 = ord(ser.read()) if ((byte1 == 1) & (byte2 == 2) & (byte3 == 3) & (byte4 == 4)): break # # read and plot # up_low1 = ord(ser.read()) up_high1 = ord(ser.read()) down_low1 = ord(ser.read()) down_high1 = ord(ser.read()) up_low2 = ord(ser.read()) up_high2 = ord(ser.read()) down_low2 = ord(ser.read()) down_high2 = ord(ser.read()) up_low3 = ord(ser.read()) up_high3 = ord(ser.read()) down_low3 = ord(ser.read()) down_high3 = ord(ser.read()) up_value1 = 256*up_high1 + up_low1 down_value1 = 256*down_high1 + down_low1 up_value2 = 256*up_high2 + up_low2 down_value2 = 256*down_high2 + down_low2 up_value3 = 256*up_high3 + up_low3 down_value3 = 256*down_high3 + down_low3 value1 = (up_value1 + (1023 - down_value1))/2.0 value2 = (up_value2 + (1023 - down_value2))/2.0 value3 = (up_value3 + (1023 - down_value3))/2.0 filter1 = (1-eps)*filter1 + eps*value1 filter2 = (1-eps)*filter2 + eps*value2 filter3 = (1-eps)*filter3 + eps*value3 x1 = int(.2*WINDOW + (.9-.2)*WINDOW*filter1/1023.0) x2 = int(.2*WINDOW + (.9-.2)*WINDOW*filter2/1023.0) x3 = int(.2*WINDOW + (.9-.2)*WINDOW*filter3/1023.0) canvas.itemconfigure("text1",text="%.1f"%filter1) canvas.itemconfigure("text2",text="%.1f"%filter2) canvas.itemconfigure("text3",text="%.1f"%filter3) canvas.coords('rect11',.2*WINDOW,.05*WINDOW,x1,.2*WINDOW) canvas.coords('rect12',x1,.05*WINDOW,.9*WINDOW,.2*WINDOW) canvas.coords('rect21',.2*WINDOW,.3*WINDOW,x2,.45*WINDOW) canvas.coords('rect22',x2,.3*WINDOW,.9*WINDOW,.45*WINDOW) canvas.coords('rect31',.2*WINDOW,.55*WINDOW,x3,.7*WINDOW) canvas.coords('rect32',x3,.55*WINDOW,.9*WINDOW,.7*WINDOW) canvas.update() parent.after_idle(idle,parent,canvas) # # check command line arguments # if (len(sys.argv) != 2): print "command line: hello.load.45.py serial_port" sys.exit() port = sys.argv[1] # # open serial port # ser = serial.Serial(port,9600) ser.setDTR() # # set up GUI # root = Tk() root.title('hello.load.45.py (q to exit)') root.bind('q','exit') canvas = Canvas(root, width=WINDOW, height=.75*WINDOW, background='white') # canvas.create_text(.1*WINDOW,.125*WINDOW,text="1",font=("Helvetica", 24),tags="text1",fill="#0000b0") canvas.create_rectangle(.2*WINDOW,.05*WINDOW,.3*WINDOW,.2*WINDOW, tags='rect11', fill='#b00000') canvas.create_rectangle(.3*WINDOW,.05*WINDOW,.9*WINDOW,.2*WINDOW, tags='rect12', fill='#0000b0') # canvas.create_text(.1*WINDOW,.375*WINDOW,text="2",font=("Helvetica", 24),tags="text2",fill="#0000b0") canvas.create_rectangle(.2*WINDOW,.3*WINDOW,.3*WINDOW,.45*WINDOW, tags='rect21', fill='#b00000') canvas.create_rectangle(.3*WINDOW,.3*WINDOW,.9*WINDOW,.45*WINDOW, tags='rect22', fill='#0000b0') # canvas.create_text(.1*WINDOW,.625*WINDOW,text="3",font=("Helvetica", 24),tags="text3",fill="#0000b0") canvas.create_rectangle(.2*WINDOW,.55*WINDOW,.3*WINDOW,.7*WINDOW, tags='rect31', fill='#b00000') canvas.create_rectangle(.3*WINDOW,.55*WINDOW,.9*WINDOW,.7*WINDOW, tags='rect32', fill='#0000b0') canvas.pack() # # start idle loop # root.after(100,idle,root,canvas) root.mainloop()
TouchpaD_01.2, a better version
A newer version of TouchpaD is donwloable here as PNG for the milling machine. I had no time so far to test if it is better working than the documented version. I guess it should: indeed, the second version differs from the first just for the enlarged touch area, which was definitely too small in TouchpaD01. The overall dimension of the TouchpaD_V_1.2 is not over the FR1 big sheet size.