Now my robot looks like at video file.
what tasks have been completed, and what tasks remain?
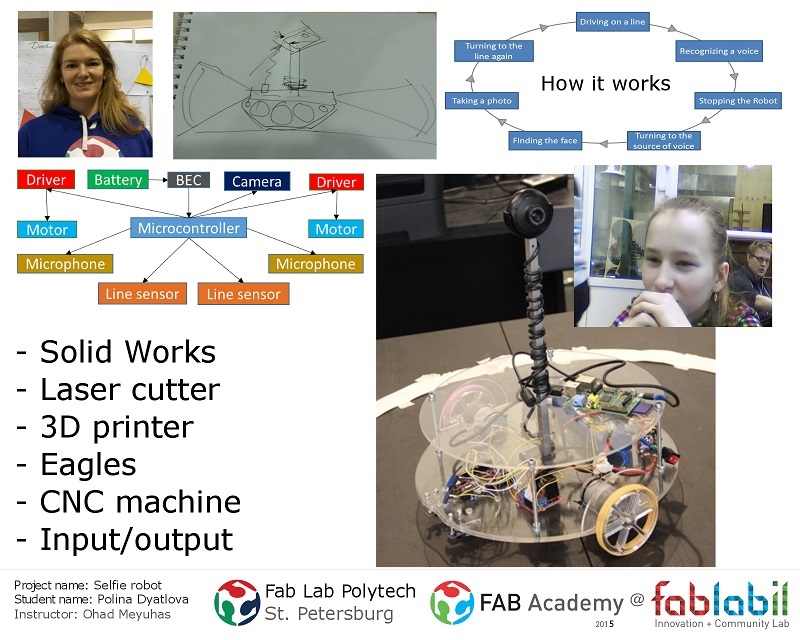
Now the robot moves along the white line and makes photo when recognise the face. I use controller Intel Edison - it allow to combine this two processes - moving and take photos. In future I would like to make the controller by myself and do the robot smaller. My first idea was that robot will caught the human voice and move into it. I know that I can do it.
what has worked?
was solved the problem with connection all electronics components and programming it with Intel Edison.what hasn't?
At this step all using technologies works.what questions need to be resolved?
Recognition of human voice, smaller size.what will happen when?
create a competitiveness model of the robotwhat have you learned?
I learned 2D and 3D modelling, work with 3D printer, CNC machine and laser cutter, work in Eagle and programming in Python, to make my own site/Final project slide
All about my final project is here .