 |
|
 |
|
Modular reconfigurable robots are redundant systems which can adopt different shapes (configurations) and move with different locomotion types. This project is called Octoblocks Octoblocks , a modular reconfigurable robot consisting of 3 modules, each one with two degrees of freedom given by two servomotors inside. On the sides, each module has magnets and screws which allows the mechanical and electronical connection with others modules. This robot is to experimenting with differents types of locomotion and research of self-reconfigurable systems. The project has three parts: mechanics, electronics and programation. MECHANICS The modules have two servomotors and two "side cases" with octagonal faces linked to its shafts. The "side cases" have the magnets and screws mentioned above. You can see the design in the following figure. 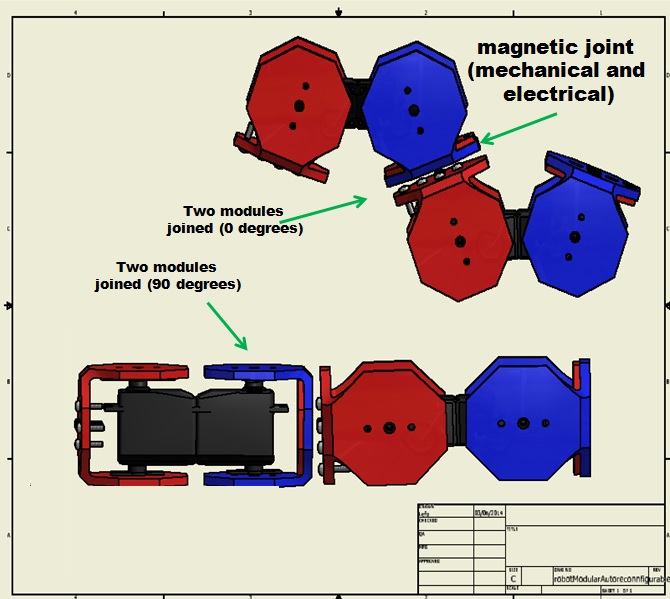
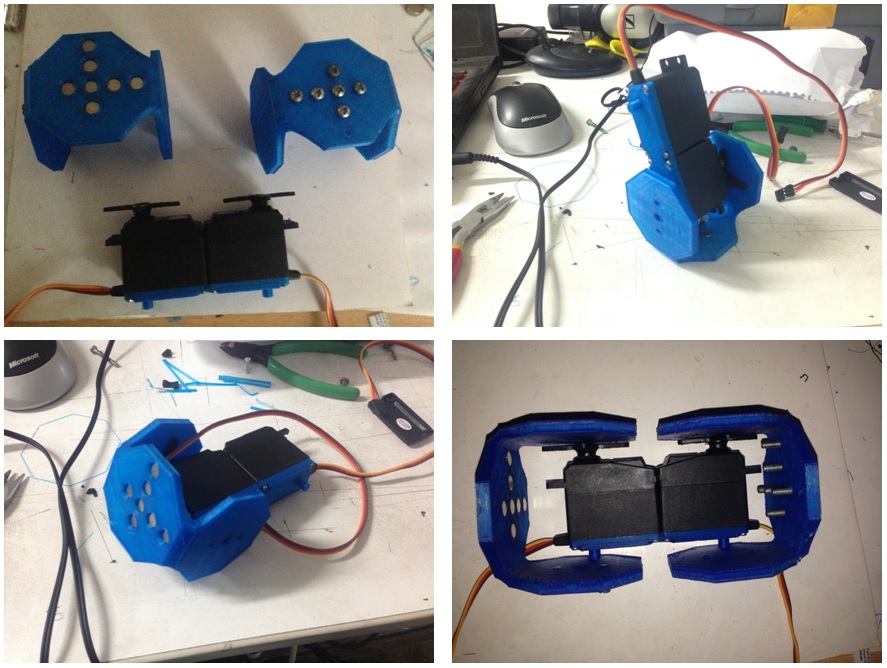 To fabricate the modules I used mainly 3D printing , please , refer to mechanical design for more detalls Here the first Test 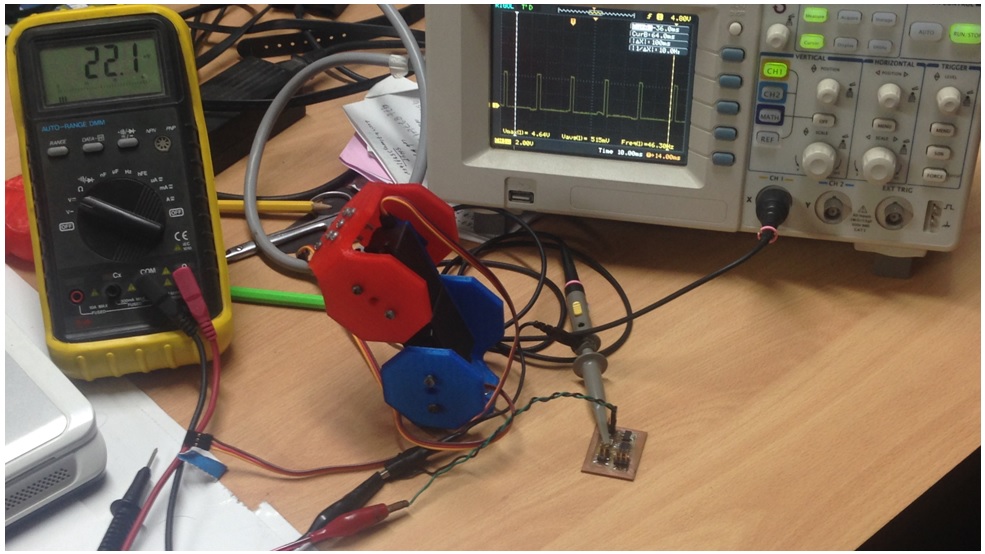 Video
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- ELECTRONICS For electronics I designed and fabricated my own control board considering one input (3 axis accelerometer) and six outputs (servomotors) The accelerometer is to keep the direction of motion when the robot turns  The lay out was a little complicated because I have no all the freedom to move the components, the position of the components are constrained because the interference generated by the movement of the robot. 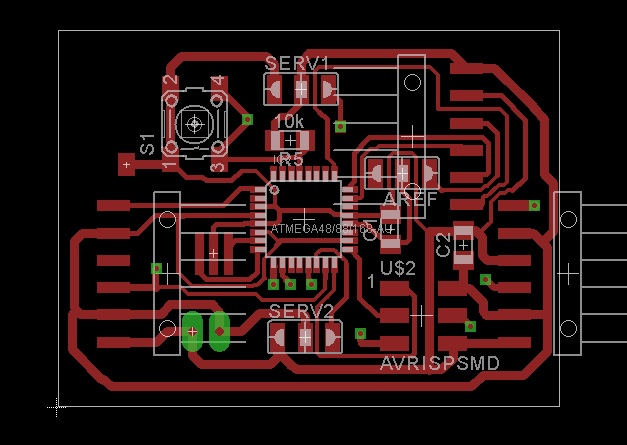 The board are based on a ATMEGA328 Welding process... 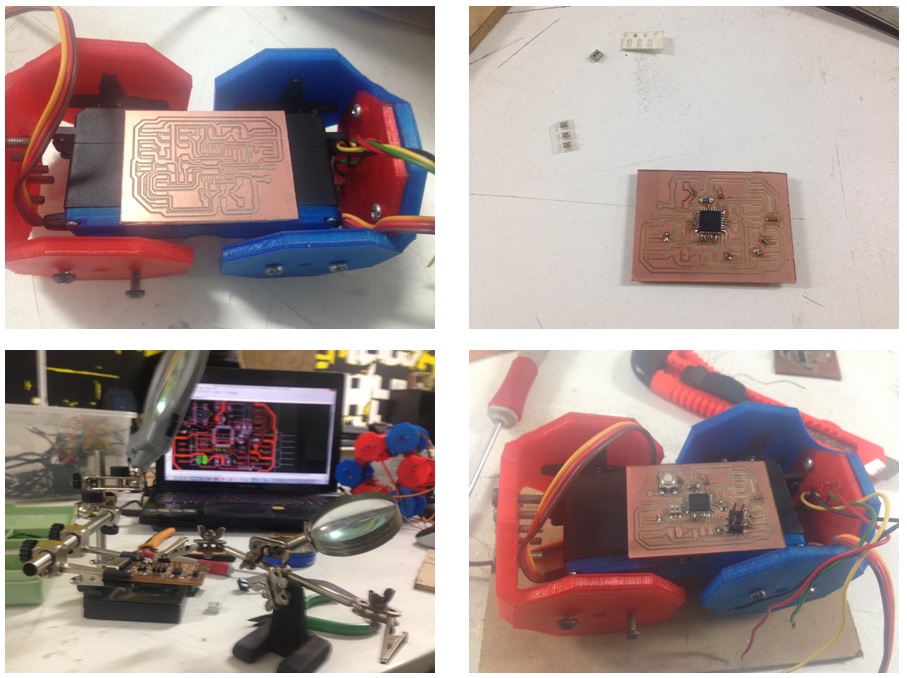 Finaly 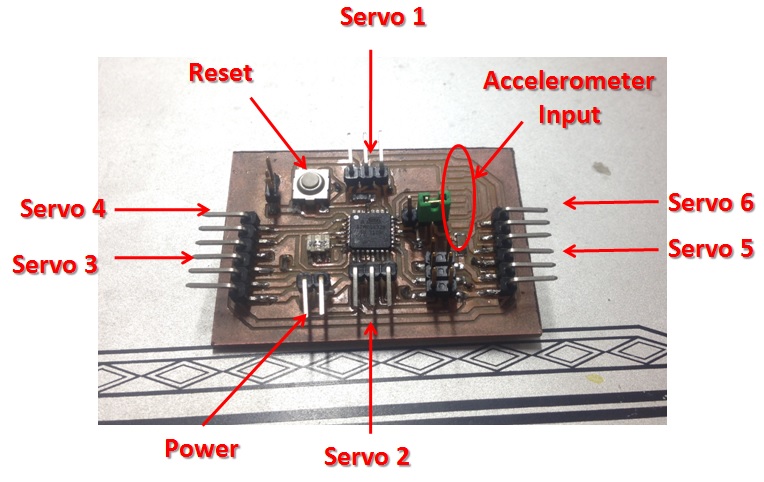 -------------------------------------------------------------------------------------------------------------------------------------------------------------------------- PROGRAMATION The basic algorithm to generate the movements of the robot is shown the figure bellow, a simple flow diagram. Each locomotion cycle have a number of steps (time 0,1..N) and a position for each servo respective 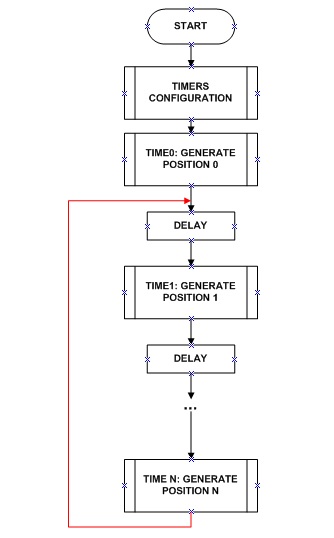 And I based on this simplified model to generate the angles for the "Snake locomotion"  Simplified model of the system I programmed all in assembler for ATmega328. The picture bellow shows an extract of the code for "snake locomotion" (you can get all the code in the link files in the end) 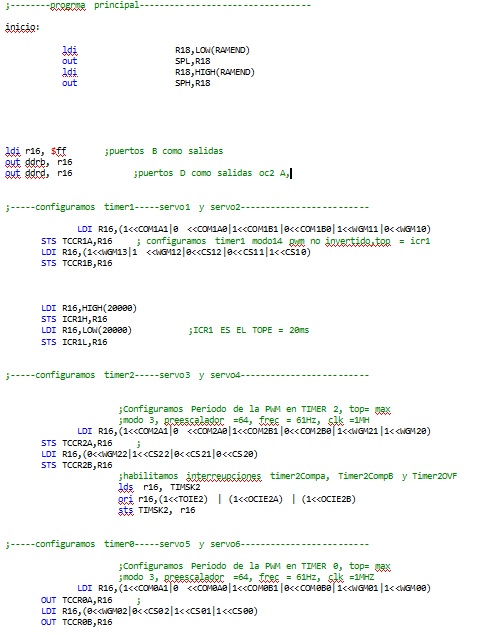 Finaly, some pictures and videos 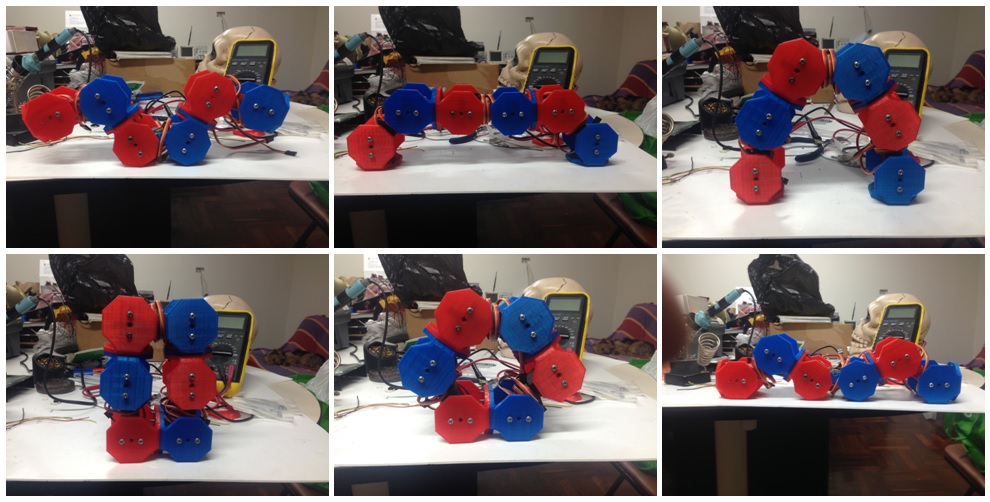

 Files: Mediafire https://www.mediafire.com/folder/mn5058esnw6sz/octoblocksGithub https://github.com/lefolindo/finalrpoject |