 |
|
 |
|
for this assignment I have to design all the mechanics form my final project. My final project is a modular reconfigurable robot consisting in three homogeneous modules, that means that I have to design one module and the others will be the same. the basic idea for a module is to put two servo motors together in opposite directions and place two "side-cases" in their shafts. The basic mechanical components are shown bellow: 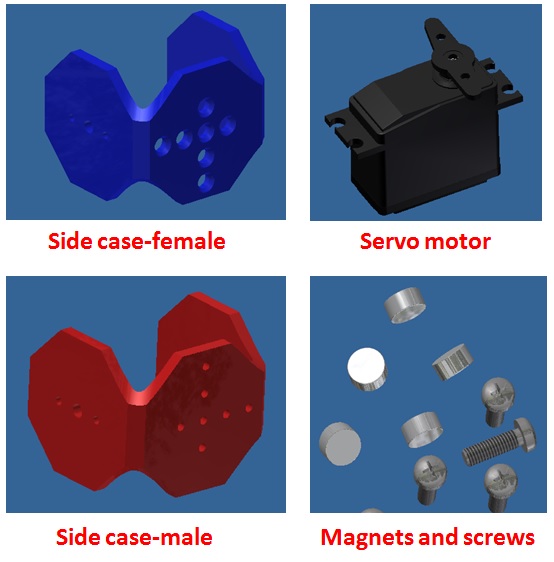 Basic components of the robot The complete design of one module and its assembly is shown in the following pictures: 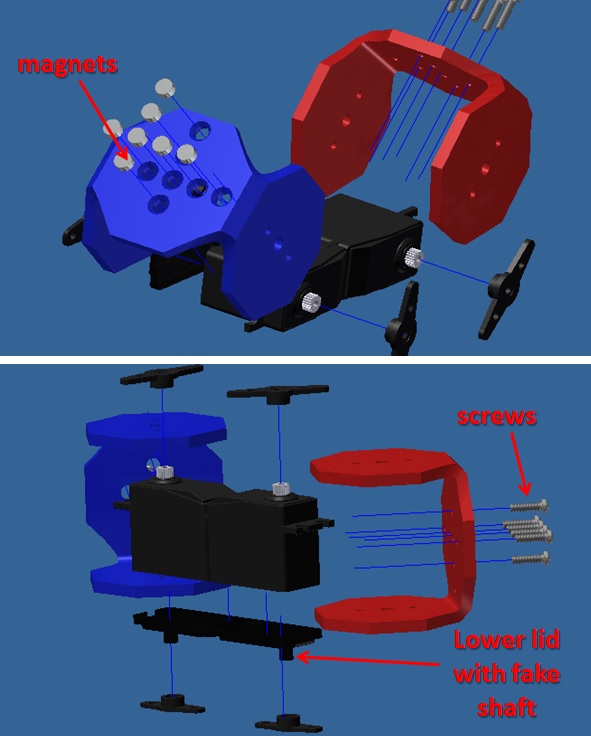
 Photo: One module complete The magnets and screws shown in the pictures above allow to plug the modules each other with 0 or 90 degrees phase. At the same time the magnetic joint allow the electronical connection and the signals pass through the magnets and screws. 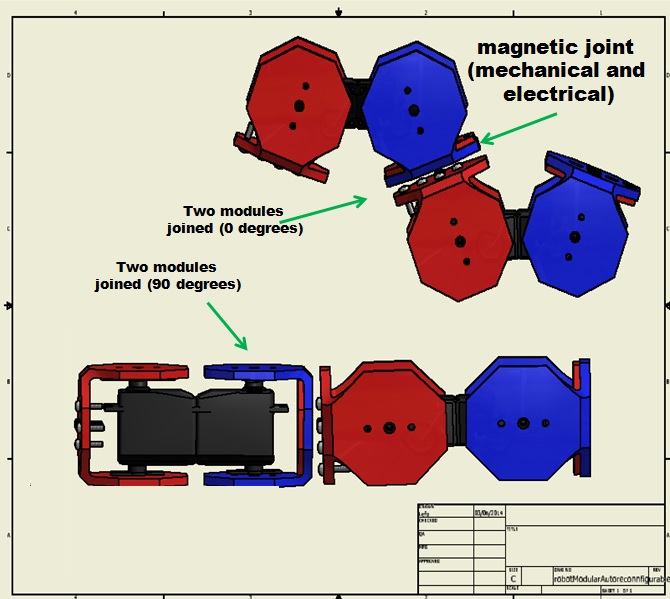 Fabricatión I used 3D printing for most parts of the robot, "side cases", lower lid with fake shaft, servo brackets, nuts holder. 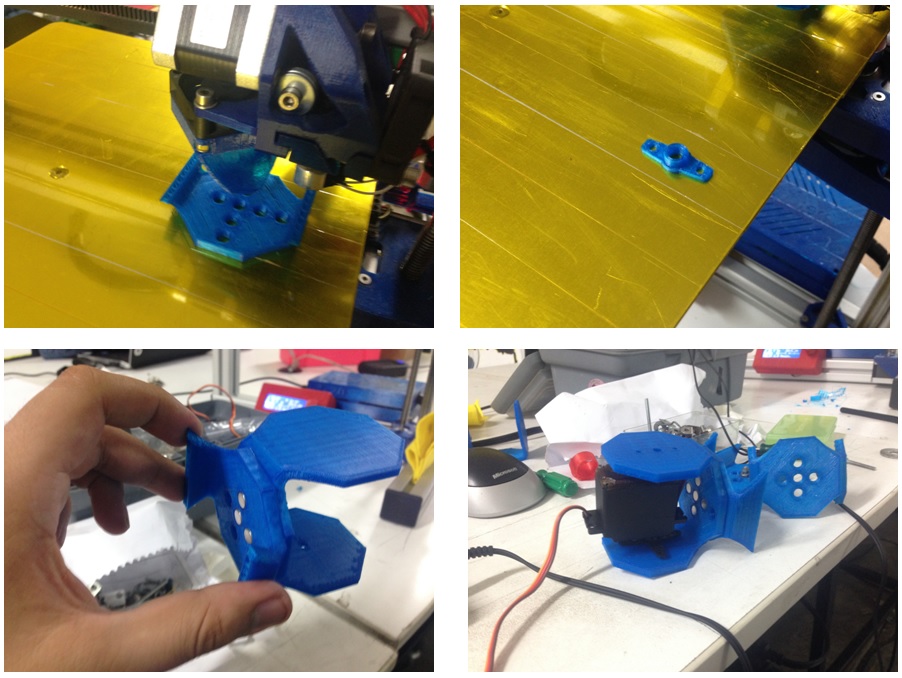 to keep the two servo motors together I designed and printed a "double lower lid with fake shaft" replacement.  for the elctrónical connection I welded wires to nuts which will be in contact with the magnets and then printed a piece to keep the nuts well positioned 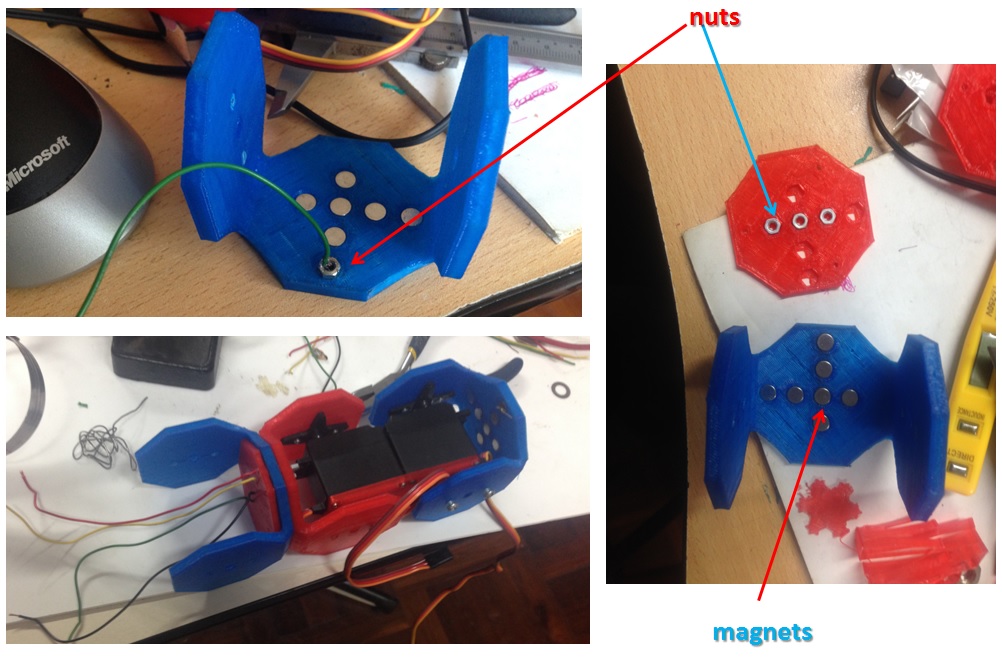 fFinaly the first test... 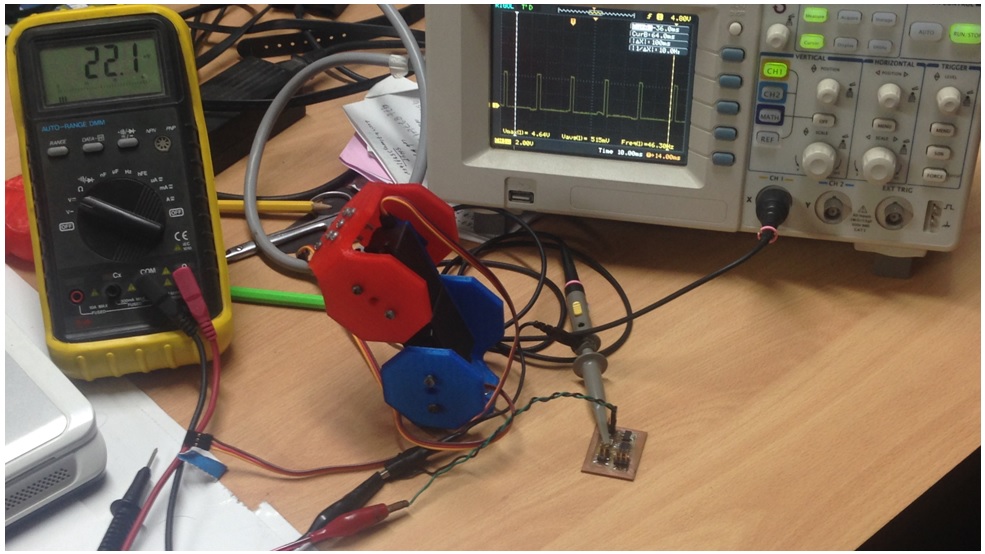 Video Files mediafire https://www.mediafire.com/folder/mn5058esnw6sz/octoblocksGithub https://github.com/lefolindo/mechanicalMachineDesign |