 |
|
 |
|
My final project is a modular reconfigurable robot. The goal is to build 3 modules each one with 2 degrees of freedom given by 2 servo motors inside, The modules will be provided with magnets on the sides in order to be able to connect each other mechanically and electronically. Once the modules are plugged, the system must be able to move in a coordinated way The maximun goal is to do a self-reconfiguration using the three modules. 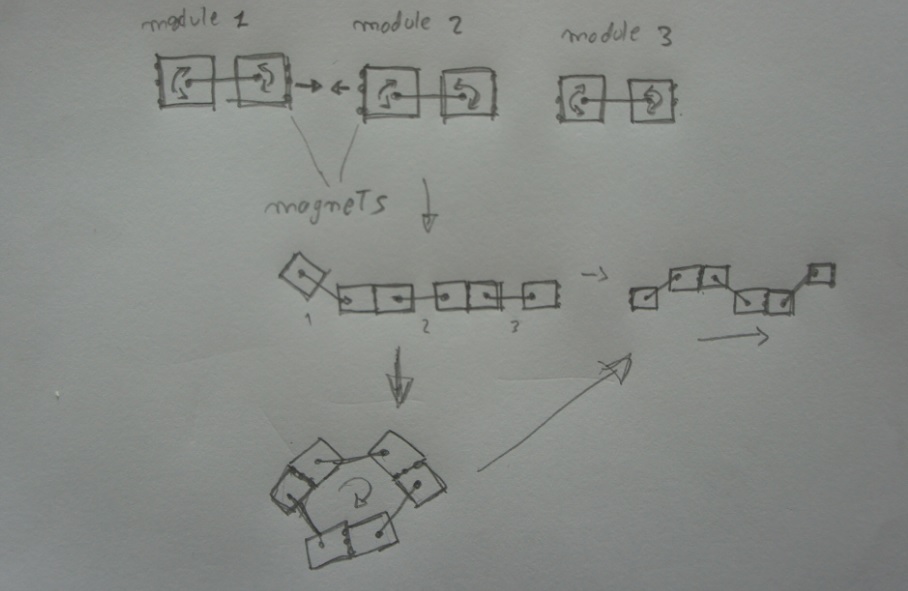
... |