 |
|
 |
|
I will start with the firs aproximation of my modular robot. So I decided to explore deeply the Autodesk Inventor software to design the system. The approach of this software is to let you model the parts of your project independently in "part files", then you can create a "assembly file" where you can call all your parts in order to get related positions each other. The following are some photos showing the parts that I modeled on Autodesk Inventor from scratch: 
Photo 1:Inventor interface 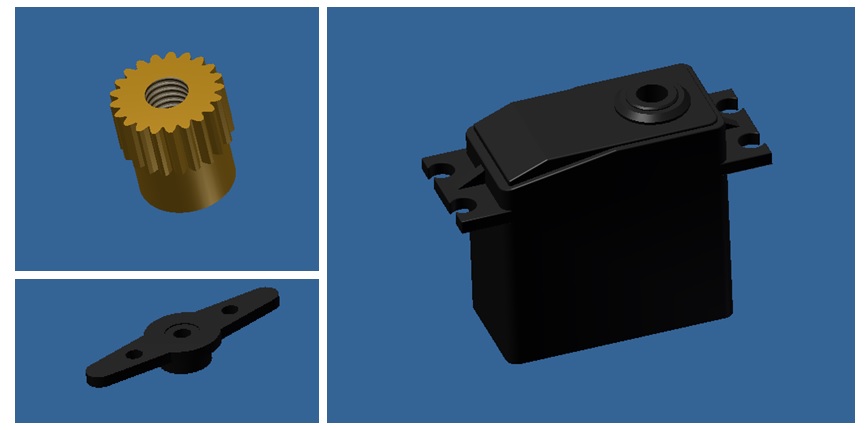
Photo 2:Servomotor parts on Inventor 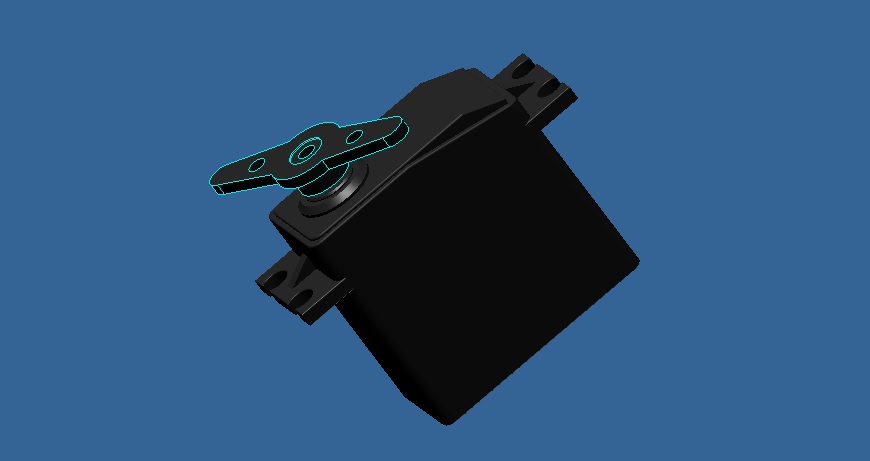
Photo 3:Servomotor assembly on Inventor 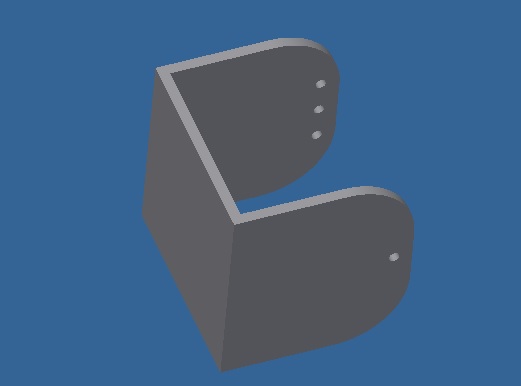
Photo 5:"Side case" to conect with servo motor And finly the assembly: 
Photo 4:First aproximation of a module The next step is modeling one complete module inluding servomotors and the joint system. Files: Mediafire https://www.mediafire.com/folder/s60wndwfh4vs6/CIDGithub https://github.com/lefolindo/cid |