 |
|
 |
 - what will it do?
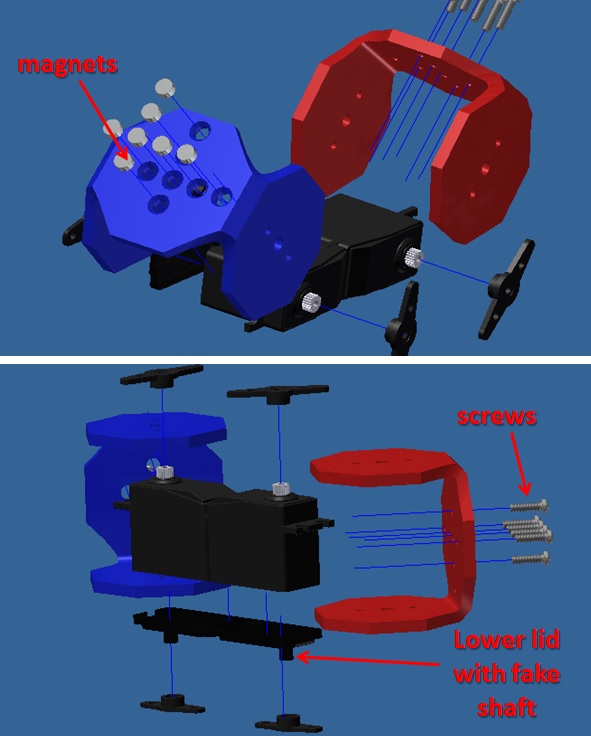
A modular reconfigurable robot should be composed by more than one module and each module should be able to joint other modules to generate configurations and locomotion types. - who's done what beforehand? Mark Yin is the father of modular reconfigurable robotic - what materials and components will be required? - where will they come from? - how much will it cost?  - what parts and systems will be made? Mainly:The lower lid with fake shaft replacement for the servos. The joint system and define the positions of the magnets and screws. A nuts holder to connect the wires to the magnets. The general behavior of the robot - what processes will be used? - Mainly i', going to use 3D printed for the modules,computer controlled machining for pcbs and maybe mold and casting for the lower lid of the servos -what tasks need to be completed? the electronics design and the mechanical joint. - what is the schedule? finish the fabrication of all the mechanics and test the electronics - how will it be evaluated? I would like to my robot could be able to do a self-reconfigurable robot. The magnets force should be stronger enough to keep the modules joined but at the same the the modules should be able to unsnap each other. If the forces are the right ones the robot could joint and move without problems |