Week 14: Mechanical Design, Machine Design
Hi everyone. For this week assignment I really don't have a mechanical design for my final project. My final project is a soft robot with four limbs, made out of silicone that has embedded in it the electronics that have shape memory wires attached to it in order for the robot arms to bend. The only thing I could consider mechanical is the structure where I have my shape memory wires attached to, because the wires will not contract the robot arms unless they have some structure where the wires can make the pull strength to bend them.
So, for this assignment I will take the suggestion of Anna Kaziunas for the final project requirements and leave you with a diagram of the physical project layout:
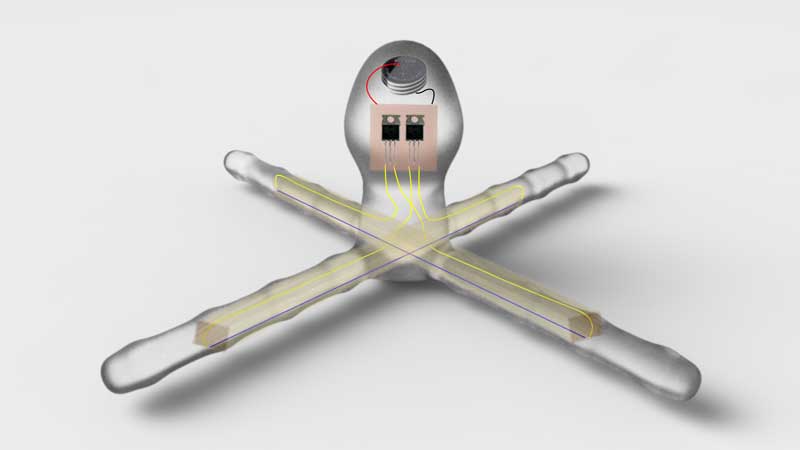
Looking into the image you can see the circuit where the two MOSFETs are. So, above the circuit is the battery connected to the circuit trough VCC (red) and GROUND (black). 3 batterys of 3V each that makes 6V. Then you can see two wires (yellow) that are normal jumper wires coming out of each MOSFET where both ends are attached to the shape memory wire (blue). Each time current passes trough the shape memory wires due to the MOSFETs, they will contract and make the soft robot arms bend in pairs.
Shape memory wire is not solderable, so i order to attach it to your jumper cables, you will need to silver crimp beads to do so. First get some crimp beads and make the wire pass inside it. With some pliers, crush the crimp bead with the wire inside. This way the wire will be touching the crimp bead and then you can solder the bead to the jumper wire. Since it is made from silve, it is an excellent electrical conductor. A really good suggestion is after you crush your bead with the wire inside, crush it again in every corner in a 45 degree angle. This way you will assure that the wire will not escape from your bead while you are maneuvering it. They seem to be very well crushed, but in fact shape memory wire is so thin that it escapes easily. Be always sure to crush your wire perfectly.
The wooden slabs, wires, circuit and battery will be inserted in the silicone while you are pouring the same to the molds. You will have to think on what will be the best way to do this. In my case I decide to insert the slabs with the shape memory wire attached to them and the jumper wires coming out first and then let it dry for a day. After a day you will have your silicone ready with the jumper wires coming out of. Careffuly solder your wires to the circuit with the battery attached to it as well. Now it's time to pour the rest of the silicone to make the robot head. While you are doing this, carefully place the circuit inside and let it dry for another day. You're done.
Project Files
Here you can download the PSD and the AI for the making of the this image diagram. Hope this can serve you as an example for future similar projects.
Final Project Body + Circuit Diagram
Thank you for watching everyone!