Academy 2013
I have been spending this week
working on my final project and it is on
schedule. The
goal is to make a troll head for a town festival
here in Iceland and the troll should have a rotating
eyes. The eyes will rotate according to an input
step response I'll carry in my hands. When someone
touch my left hand the eyes will move to left, if
someone touch my right hand the eyes will go to
right.
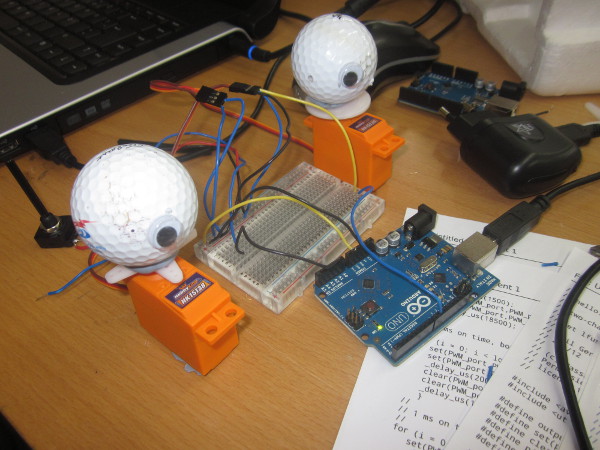
The project is going alright. Now I am trying to make my board control both motors at the same time.
The head is on hold now because I am waiting for the material that I will be using. It will hopefully arrive before the weekend so I will use the time then to cut out the head.
Here are my eyes connected to an Arduino. I am experementing with the codes to see if the motors can move at the same time:
The project is going alright. Now I am trying to make my board control both motors at the same time.
The head is on hold now because I am waiting for the material that I will be using. It will hopefully arrive before the weekend so I will use the time then to cut out the head.
Here are my eyes connected to an Arduino. I am experementing with the codes to see if the motors can move at the same time:
Here are the codes I got so far
to control the motors.
#include <Servo.h>
Servo rightservo; // right eye Servo leftservo; // left eye
int potpin = 0; // analog pin used to connect the potentiometer int val; // variable to read the value from the analog pin
void setup() { rightservo.attach(9); // leftservo.attach(10); // myservo.attach(9); // attaches the servo on pin 9 to the servo object // myservo.attach(10); // attaches the servo on pin 9 to the servo object Serial.begin(9600); // thetta setti eg inn }
void loop() { rightservo.write(90); // starting point for right eye rightservo.write(20); // right eye looks to right
rightservo.write(160); // right eye looks to left
leftservo.write(90); // starting point for left eye
leftservo.write(20); // left eye looks to right
leftservo.write(160); // left eye looks to right
}
#include <Servo.h>
Servo rightservo; // right eye Servo leftservo; // left eye
int potpin = 0; // analog pin used to connect the potentiometer int val; // variable to read the value from the analog pin
void setup() { rightservo.attach(9); // leftservo.attach(10); // myservo.attach(9); // attaches the servo on pin 9 to the servo object // myservo.attach(10); // attaches the servo on pin 9 to the servo object Serial.begin(9600); // thetta setti eg inn }
void loop() { rightservo.write(90); // starting point for right eye rightservo.write(20); // right eye looks to right
rightservo.write(160); // right eye looks to left
leftservo.write(90); // starting point for left eye
leftservo.write(20); // left eye looks to right
leftservo.write(160); // left eye looks to right
}
