

CLOCK
As mentioned before
in the concept
page, that I consider time as an
illusion, I's the only constant in our life where it
organizes everything yet it's not tangible it's
more of a perception than a physical quantity
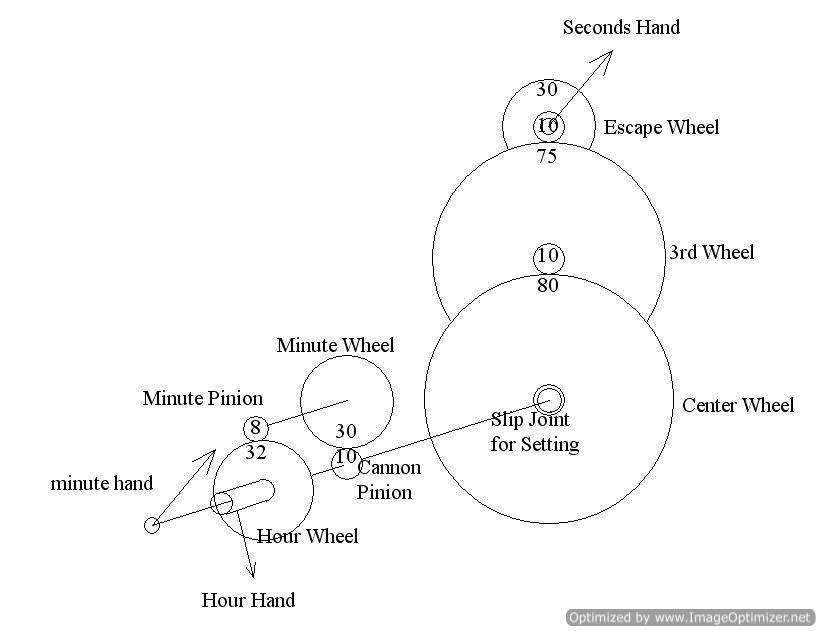
So I started to look
closely at the mechanism of the clock
and how does it interprets time through
mechanical motion.
Whenever you mention clocks, you
defiantly think of gears and that’s
where I started
I was so inspired by DAVID C.
ROY wooden kinetic sculptures while mainly
the whole mechanism is self-initiated
that last for hours some of them last forever.
Shimmer
was the STAR to me the flow of both layers was
exactly what I had in mind
BLIND description for the project
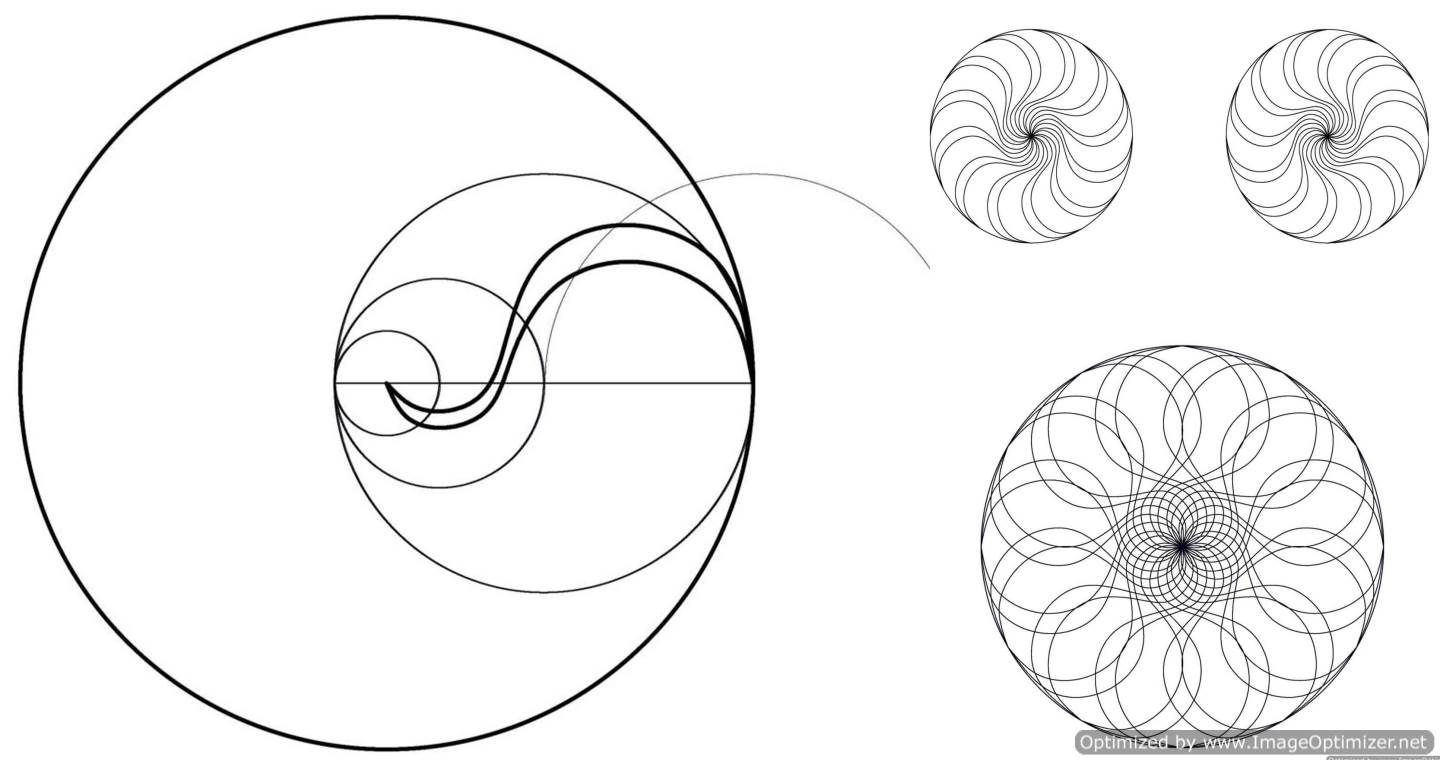
There will be
three layers two with inverted geometrical patterns
while the middle one will tell the clock
so after 6o consecutive revolution of giving a
different layout every minute it will move the layer
behind it (the one that describes the clock in
numbers)
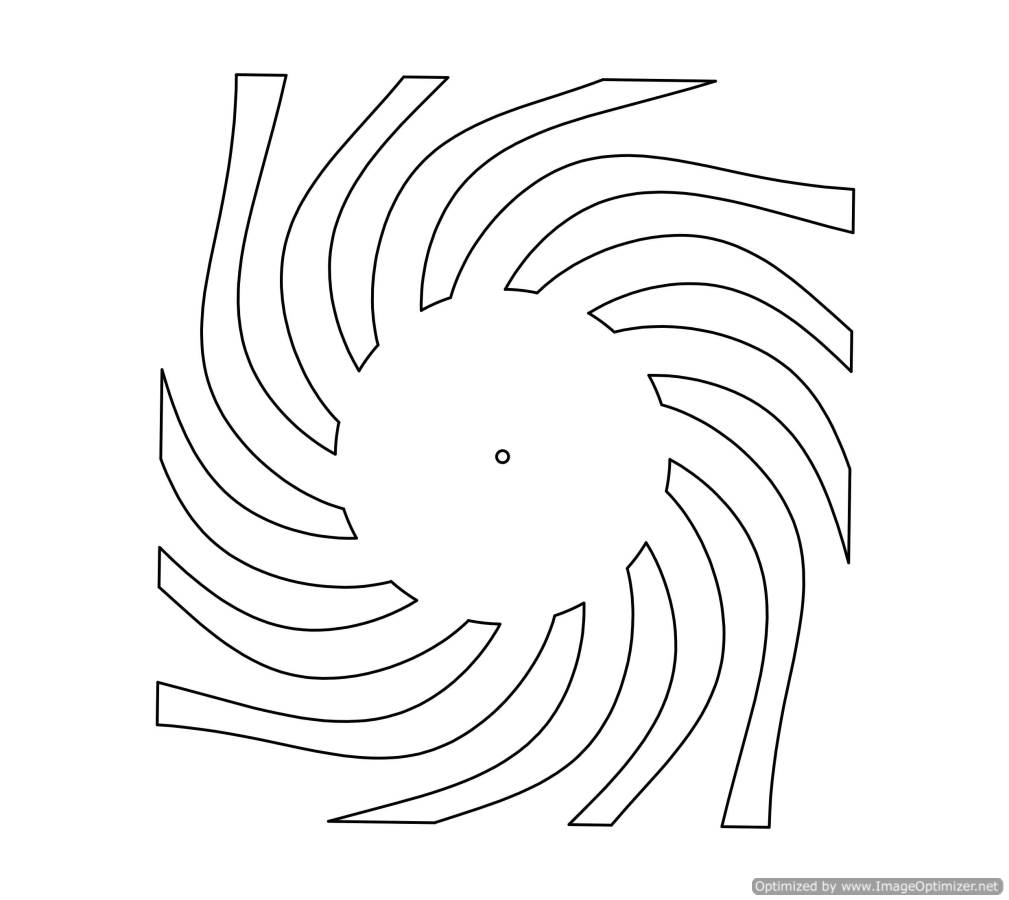
Then the back one with the
inverted geometry will be the one connected to
the proximity sensor, it will sense when someone
is looking at it and revolve
in the opposite direction of the front one
giving a different effect (similar to the
shimmer effect)
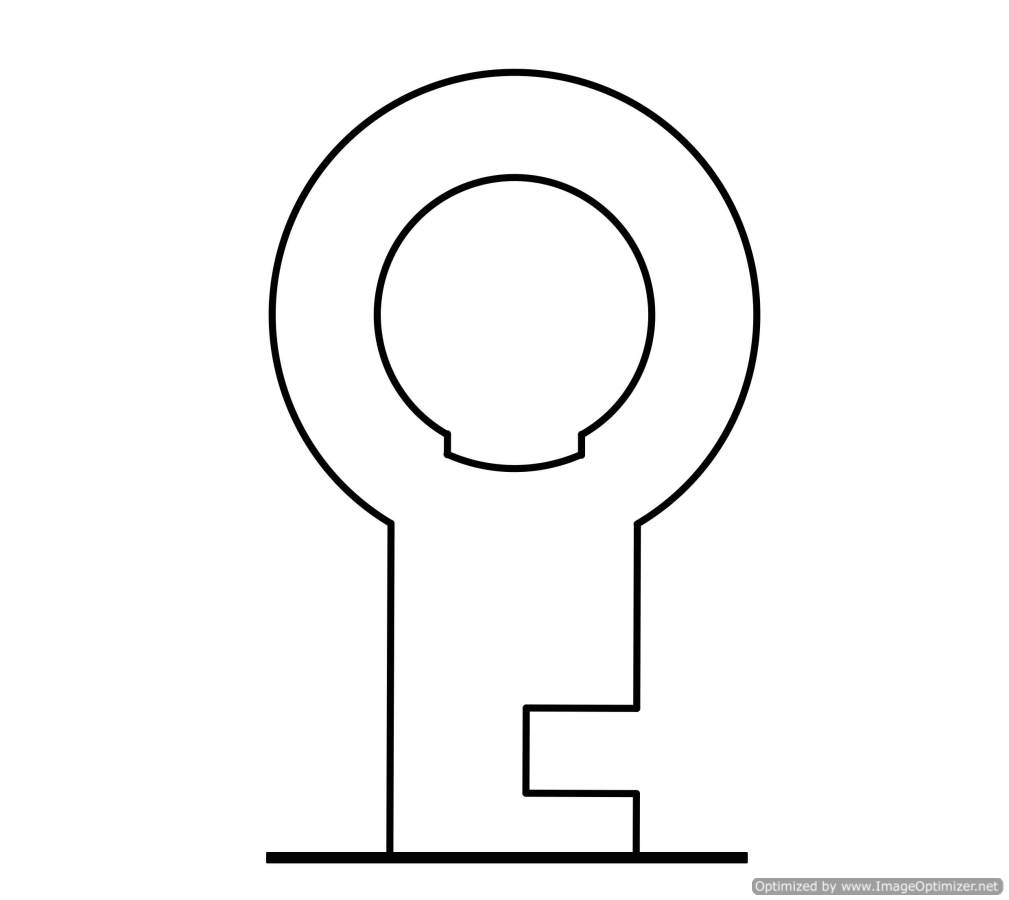
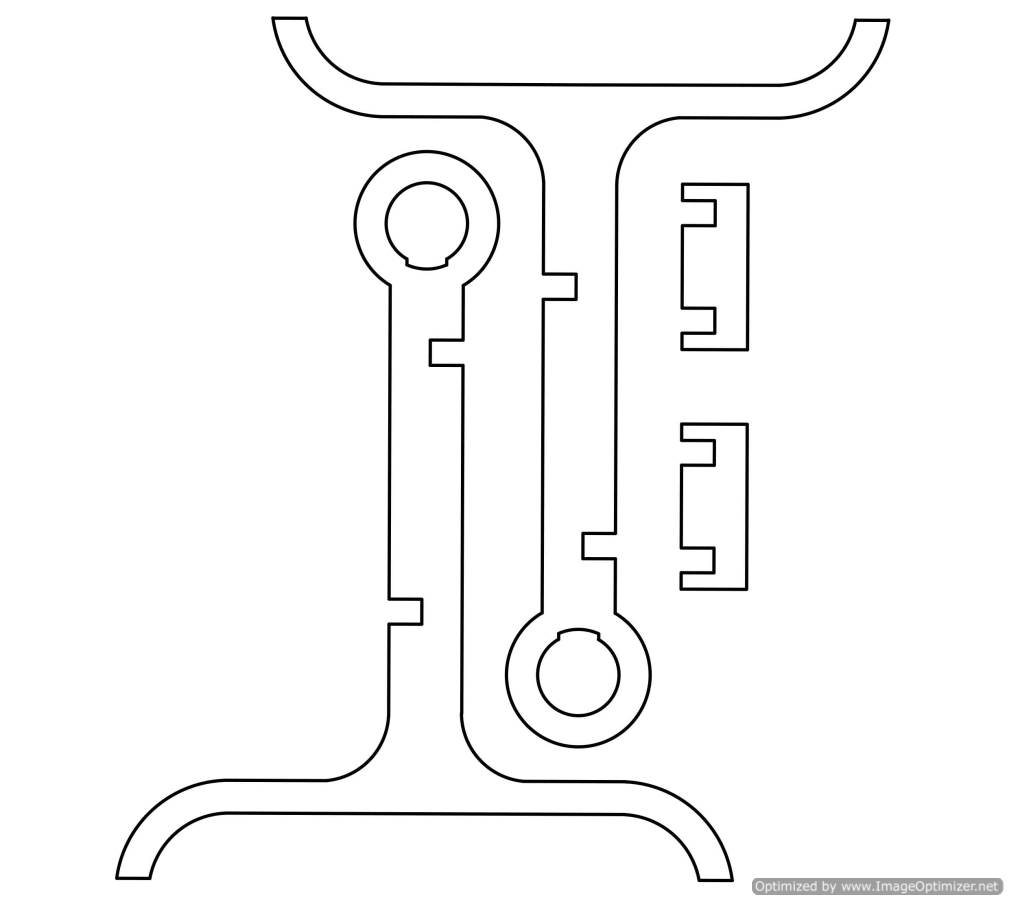
i started by designing the
two gears for the visual effect, i used AUTOCAD
2013 for the 2D form generation
FABRICATION
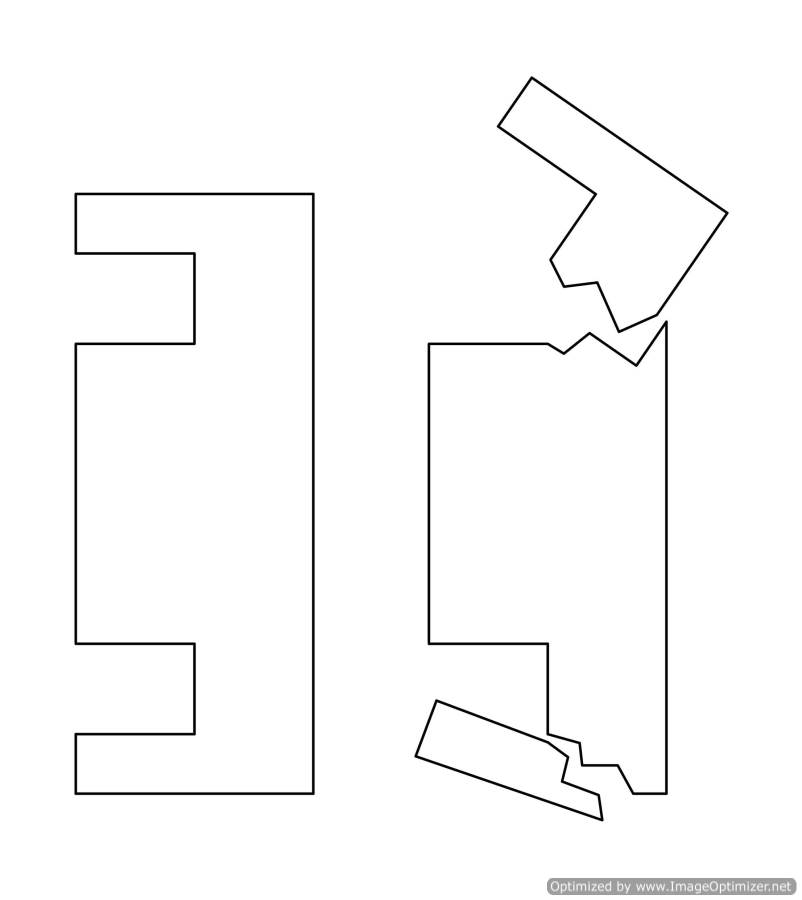
please not that
some documentation were lost that's
why I'm referring to some failed
trials with diagrams instead of real
pictures
I
started using bamboo for both the gears and the
carrying arms where the two gears will revolve on. i
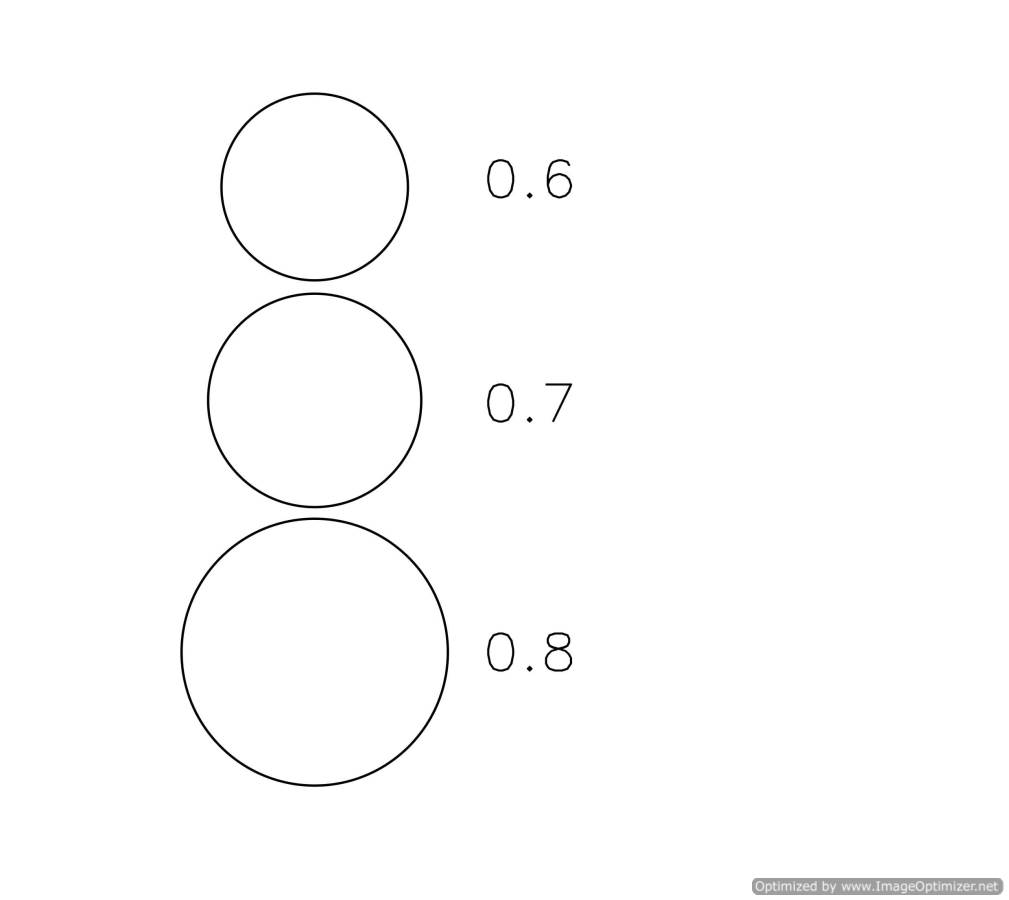
started by testing the hole where the motor will fit
in,
i used three different sizes, examined them on a
small model of the gear, i used the 0.7 as the 0.6
broke while pressing it and the 0.8 was
too loose the gear didn't spin with the motor
.
I used the big laser cutter with speed 16 and
power 80 as the thickness of the bamboo sheet
was 5.2mm
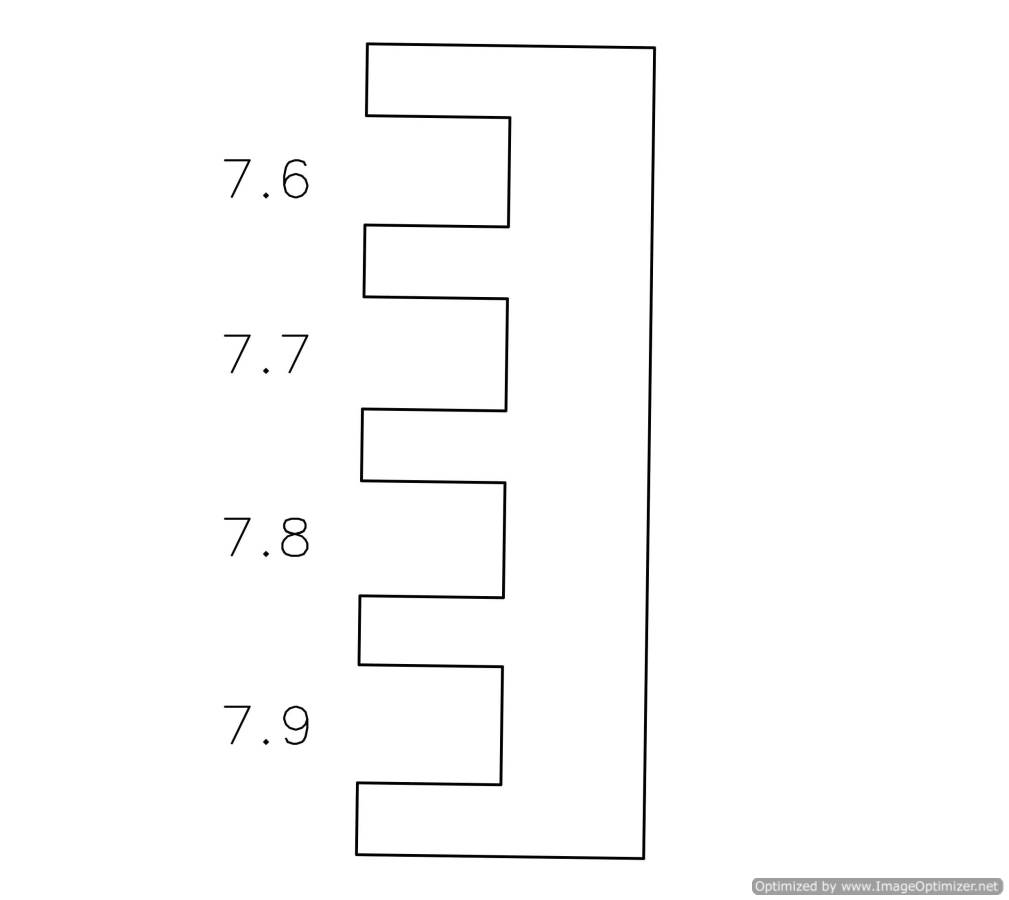
amboo
is a natural fiber that has a direction you cant
use it with thin sections specially if it was
press fit, B
the rapid use, the fibers gets easily
disconnected i tried overcoming that by
changing the section of the arms, they ended up
too wide for the use!
in addition to this they both were too thin
to stabilize
watch
the video
To solve the
problem i had to use a thicker material, i used MDF
wood with thickness 8mm, the thickness helped the
model to stabilize even while
moving the motors and gears. it was better to use the
milling machine with this material but it was busy and
i had no time so i used the same laser cutter
I kept testing the speed and power till it cut through
with speed 8 and power 60 i had
to modify the bed of the motor to fit exactly
the size and allow
the cables to pass behind the supporters.
ELECTRONICS
at the I didn’t want to use the ready
proximity sensor I wanted to design my own one,
with references I managed to make the infrared one
that
worked with a transmitter and a receiver LEDs with
the metal isolator between them. the sensor worked
and it was reading but the results were
poor in difference, I wasted
sometime trying to develop it but then i
ended up using my light sensor ready board
from the input
devices week
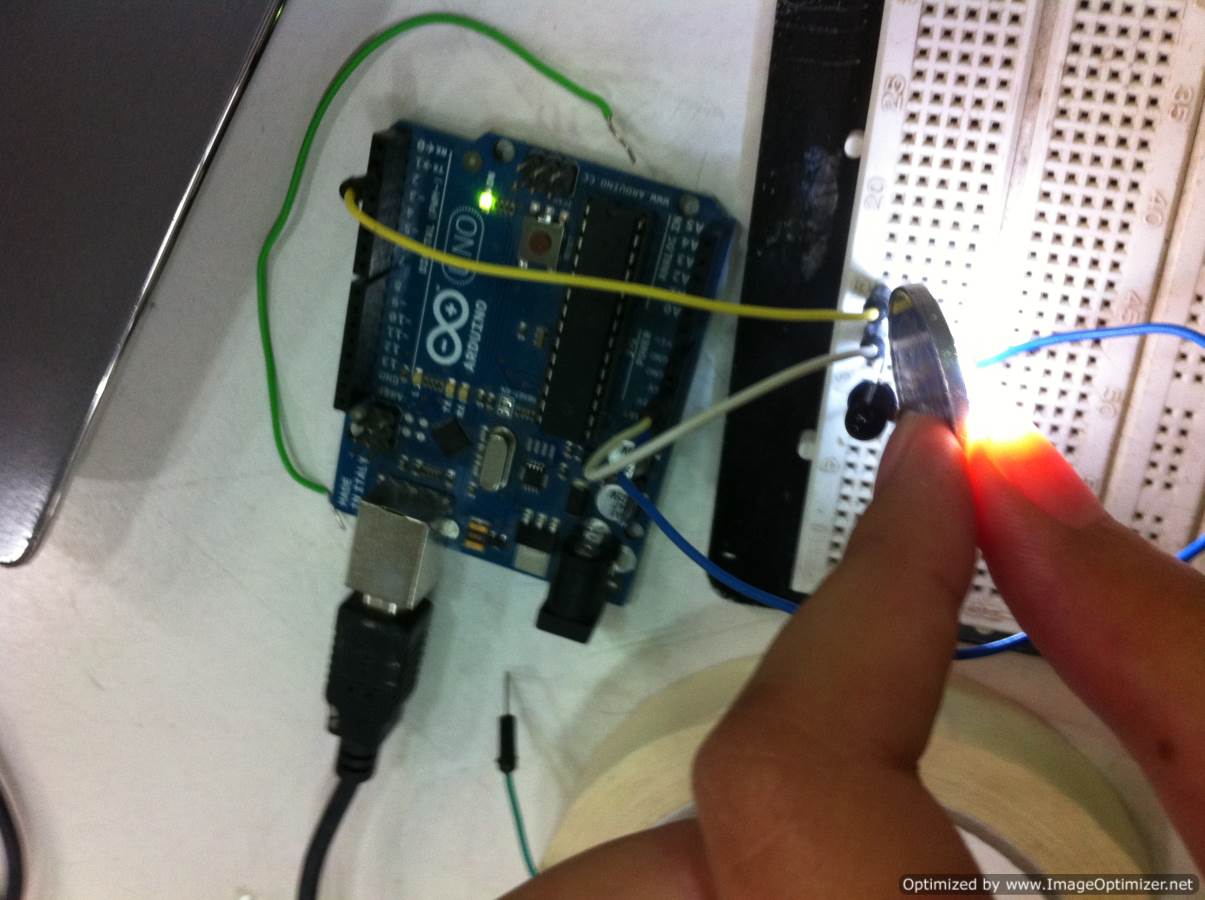
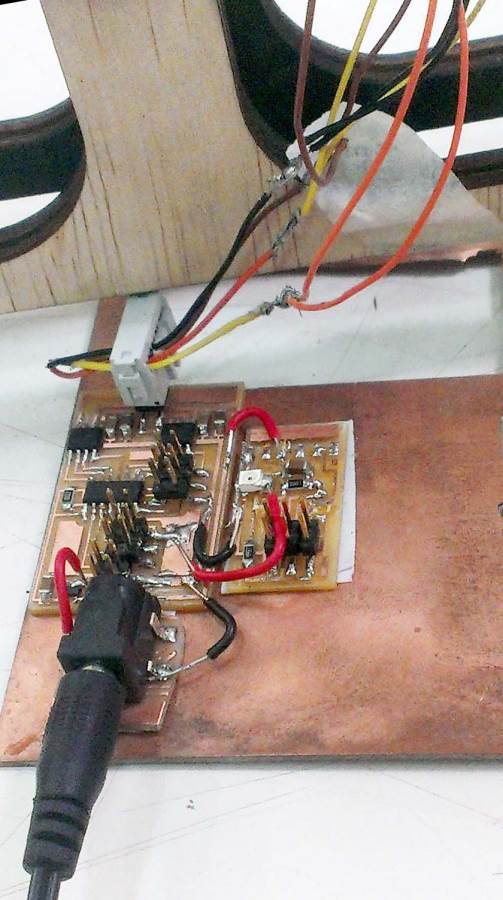
The board was simply designed to input the values
from the sensor and translate them to control the
motor's speed
Choosing the components?
please
note that during the first final round i
didn't have time to design the board on
eagle so i used the ready ones i've
already made from the past
weeks,i added jumpers and they worked
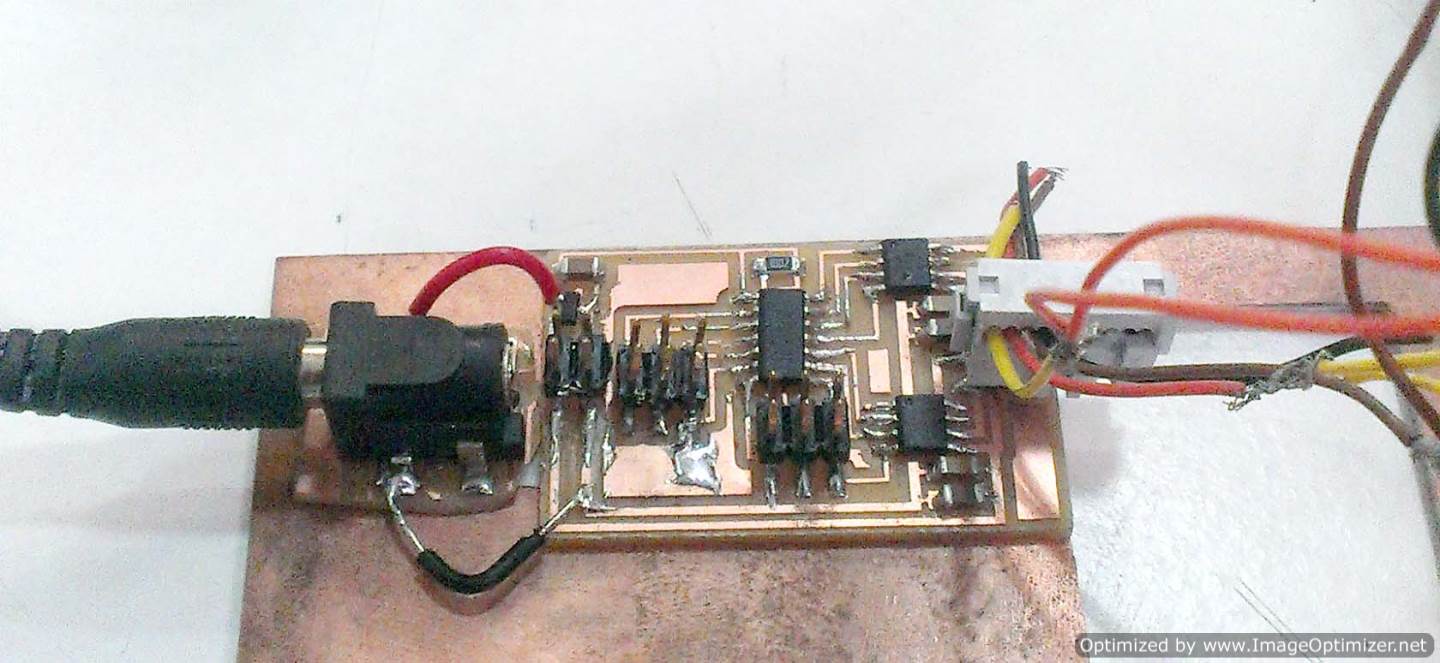
fine, later on after the first submission
i had time to design the board with the
same components on one board
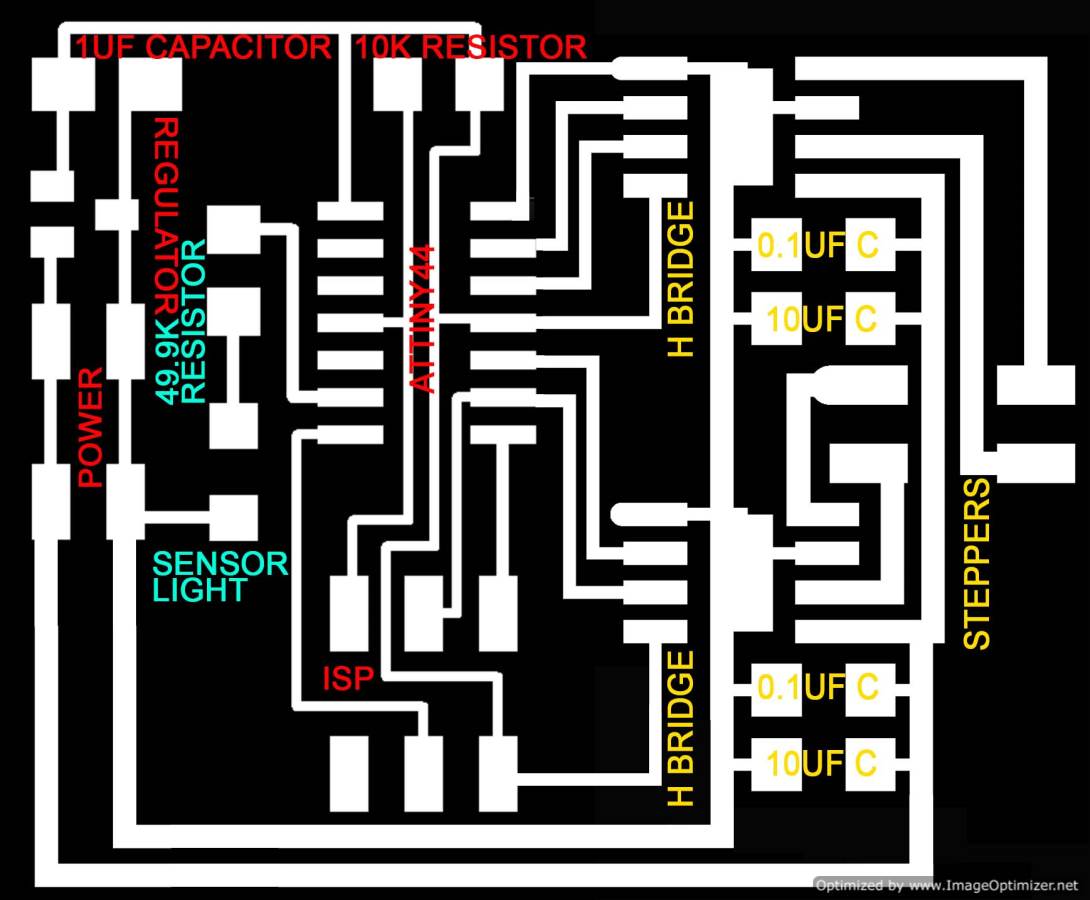
The micro controller: ATTINY44 was the choice
as for the number of pins and the memory it has is
suitable to store the program and run it efficiently
The
light sensor: it needs
a resistance along with it so I used the
49.9k. It also needs to be connected to a reading
pin in the microcontroller so I used PA7
The
steppers: I used
unipolar steppers but by excluding two wires I was
able to use them as bipolar as they proved through
research that they have more torque
with high speed The idea with the motors was to turn
both motors from the same board, so I arranged the
coil cables identically so that when they are
placed back to back they spin
in the different direction (watch
the video)

Power supply: in order
to turn both motors at the same time I needed a
voltage higher than 9v so that when I added the
power jack. The power jack has
direction,
the one I used had a metal bar from the side that
indicates the positive input
The
regulator: along with the power supply came the 5v
regulator to regulate the current coming from the
power jack and fix it to maximum 5v
Capacitor:
it's advised to use a capacitor before the
regulator in the power line to keep it cool and
avoid burning it with high current

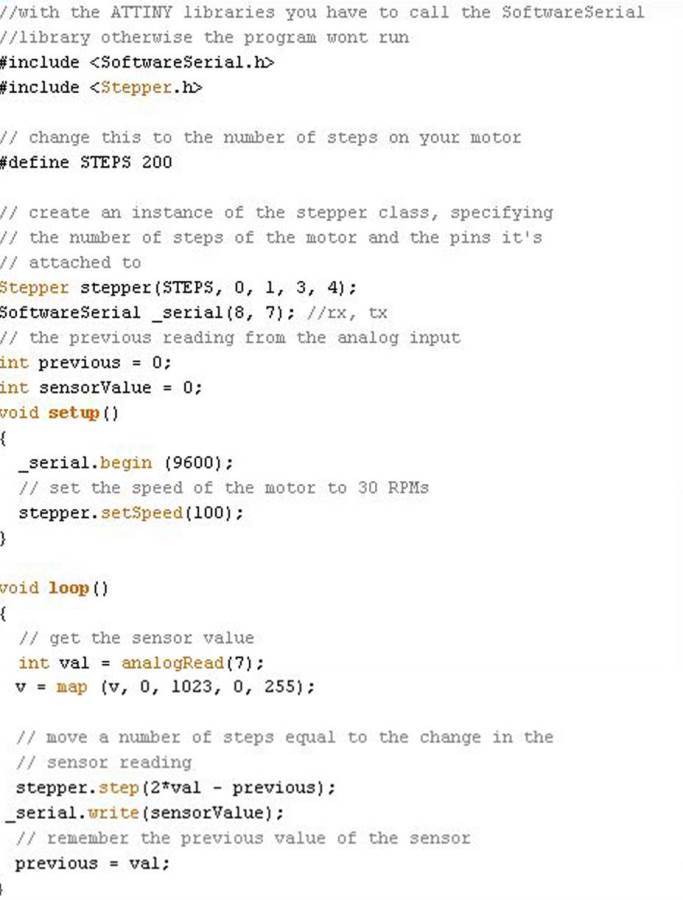
i used Arduino to program this microcontroller, i modified the stepper code, to read input from the light sensor added at it
at the beginning the sensor value were so wide for the motor to read, so i mapped them with a math equation then they worked fine
watch
video one
watch
video two
IN THE END!
I didn't
come up with an invention that changed the world
but in fact i did change my life, 6 months ago I
knew nothing
about clearly EVERYTHING, so I'm grateful to
every one, my gurus, my class mates, and even to
Barcelona for this life time experience
FROM CAIRO
>About
>Proposal
>Digital model
>Laser Cutting
>Electronic
production
>3D Scanning
& Printing
>Electronic Design
>Molding & Casting
>Embedded programing
>Computer-controlled
machining
>Input devices
>Composites