2013




.
7 years ago, I did my undergraduate thesis in the inverse dynamic modeling with O(log2(n)) for a snake like robot with a couple of friends. With simulated the algorithm with a program called Robomosp. Robomost is a robot modeling and simulation platform developed in the Pontificia Universidad Javeriana Cali by several researcher assistants and engineering students (including myself). The trajectories were based on Shigeo Hirose’s serpenoid curve. The thing, is that we never built the actual robot, and so, for Fab Academy course project, I want to built it, and hopefully, make it move without wheels.
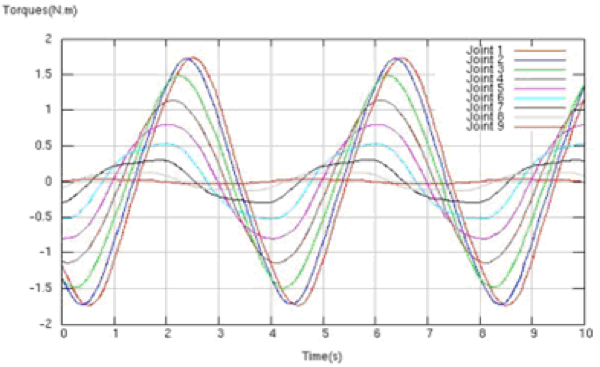
Snake like robot with 10 DOF modeling on Robomosp. Joint Torques
And so, for my course project, I want to design and build a snake like robot to take this to a step further.

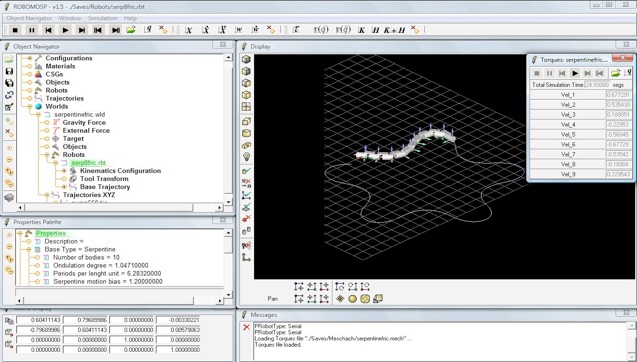
Snake like robot with 9 DOF modeling on Robomosp. In this forward dynamic simulation, the robot is moving with the friction between the bodies and the ground.

If there’s no friction with the ground the robot will not advance, and mass center will stay in same spot. This kind of simulation is called “floating base”

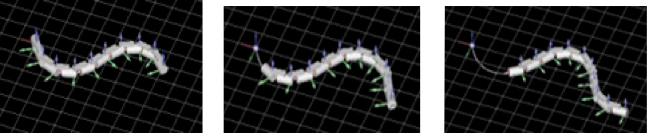

If theres friction with the ground the robot will advance.