2013


.







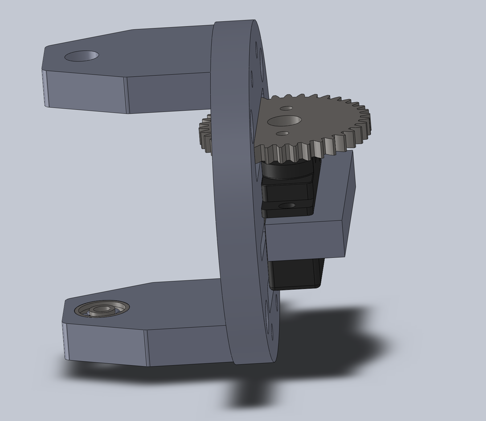
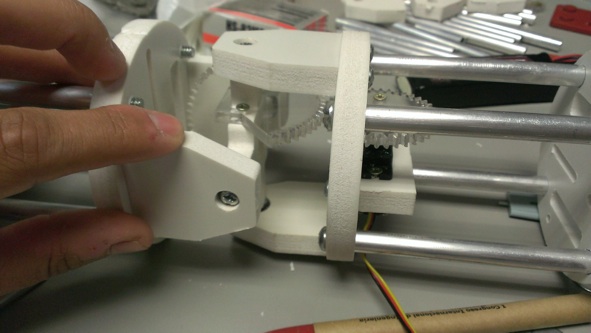
Welcome to my final project presentation. As I said before, the original design had to be changed for fabrication. The design has been done with solidworks. The snake will have 2 DOF joint. Next the end of a body can be seen with the micro-servo attached. Bearings have been added to support the main axle The disks diameter is 8 cm.
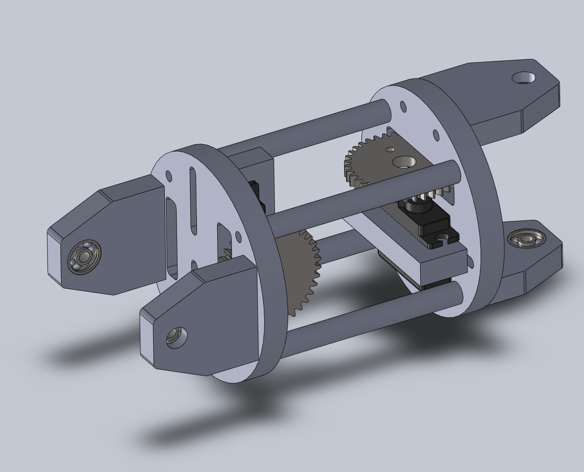
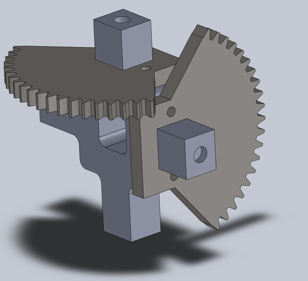


Previous piece is attached with another alike by 4 tubes of 8cm long. Notice how the axis of the 2 servos is inverted. This is a single body.
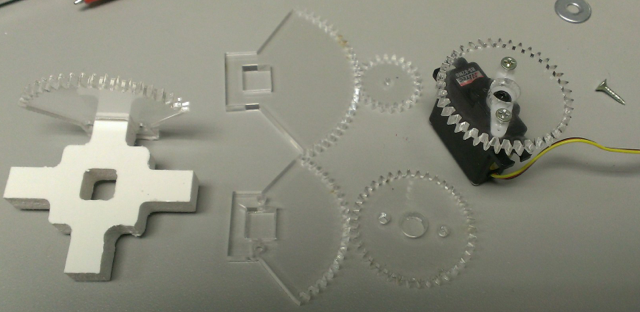

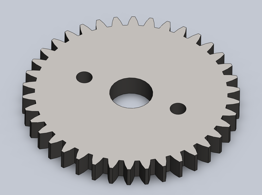
Next I designed the gear. I made a mistake with the ratio because I thought that the servo range was 360 degrees instead of about 110 degrees. Next, the spur (right) and the pinion (left) can be seen with the correct ratio. Solidworks toolbox was used for the design. The gears modules is 1.

This gears were cut with a laser cutter using acrylic. A picture of the 2 different sets of gears can be seen next, with their mounts on servo and main axle.

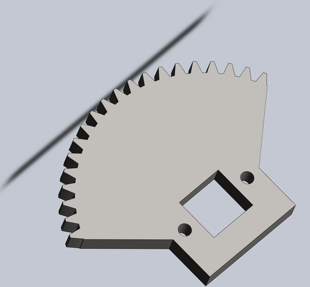
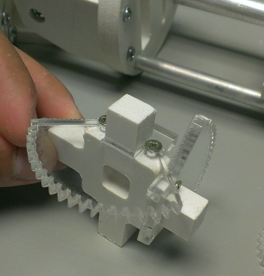
The main axle has been designed with a square cut in order to fix the gear. This peace has been done using PVC sheets of 9mm and a CNC router. Next, a screenshot of the model and the actual piece with gears can be seen.

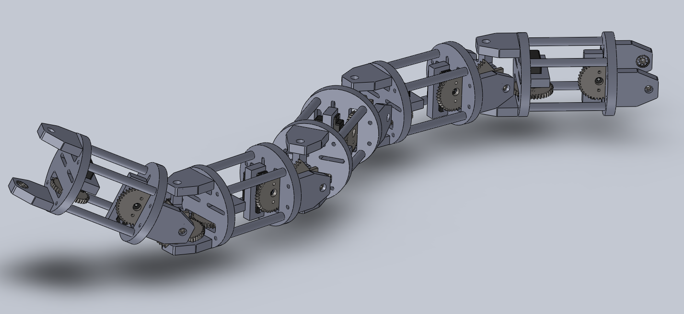
The complete design can be seen next with 4 links. In the future, it will have at least 10 links

Next, the disk cut can be seen with the CNC router. Almost all the pieces were fabricated this way

Then, the assembly started

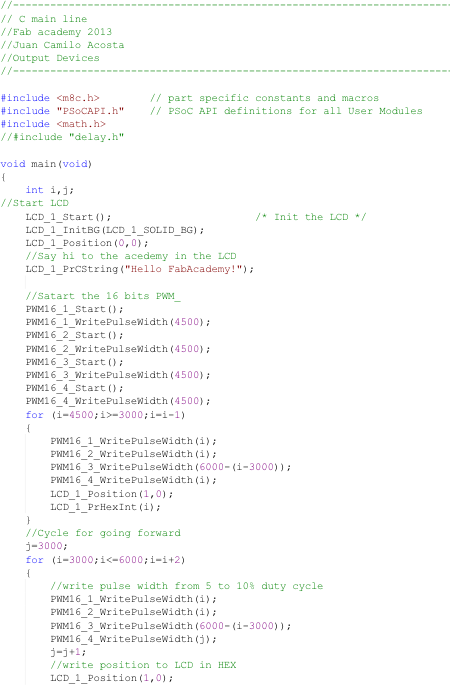
PSOC was used to control the servos. The same 2 boards were used. The code can be seen at the end of the page. Next the complete assembly can be seen followed by some videos of the first test.
Of the 3 links, only 1 has 2 servos, the other 2 have only 1 serve leaving the other degree of freedom unlocked allowing the snake to accommodate to the floor surface..
This is a long therm project, some things still need to be done. First, add more modules, then program a snake trajectory like sidewinding, serpenoid curve (S. Hirose) or worm style. After, see how the body can be closed and pick a good material for friction optimization.
In therms of electronics, this PSOC 1 supports 8 PWM of 8 bits or 4 PWM of 16 bits. Without changing the board, PSOC 1 can be upgraded to support twice that amount. However for 10 links (20PWM) a new board needs to be made using PSOC 5.
The following code puts the joints to oscillate just to test mechanics. In order to make the snake advance, a trajectory need to be programmed