2013




.
For this assignment I decided to develop in Solidworks, the snake like robot 2 DOF joint including part of the body. I decided to do 2 DOF joint instead of a 1 DOF joint in order. The main idea is that each body will have 2 servos in each of the end. This way, each joint motors will be in both bodies. It is a design based on Shigeo Hirose ACM- R5 amphibious snake like robot.
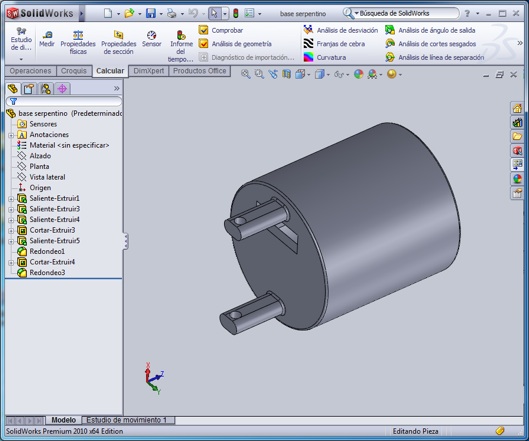
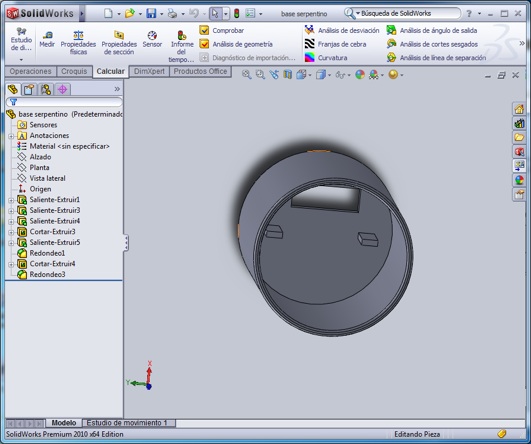
The first thing I did was a basic cylinder as the body, closed on one side. There, I added two supports for a servo, and a hole:
Inside view of the body with supports for servo. Cylinder radio is 4 cm.
Outside view of the body with link supports
In that middle hole, will be attached the following piece that will be attached to the other body.
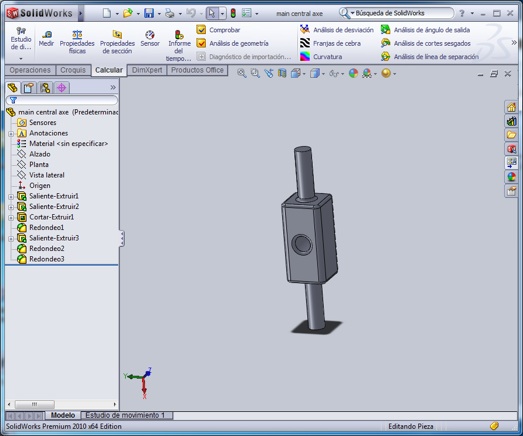
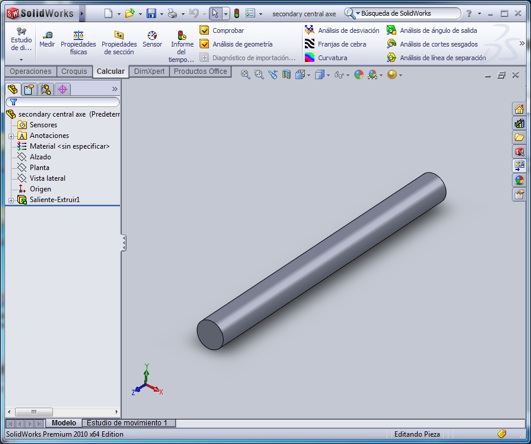
Axle for X-axis rotation
Axle for Y-axis rotation
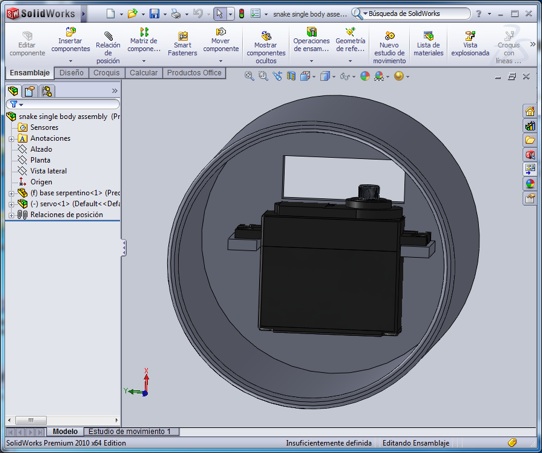
Main body and servo assembly
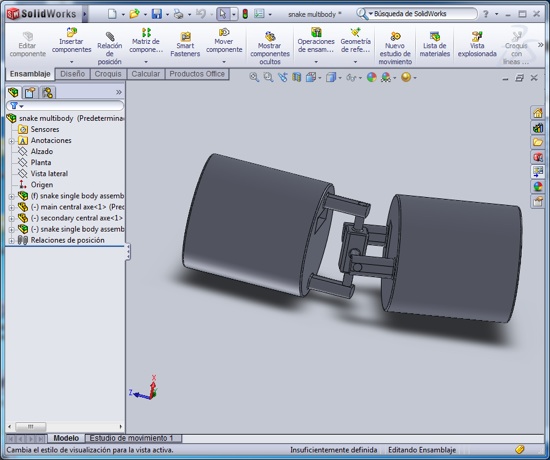
Assembly of the 2 DOF Snake like link. Left body rotates with x axes, and right body with Y-axis
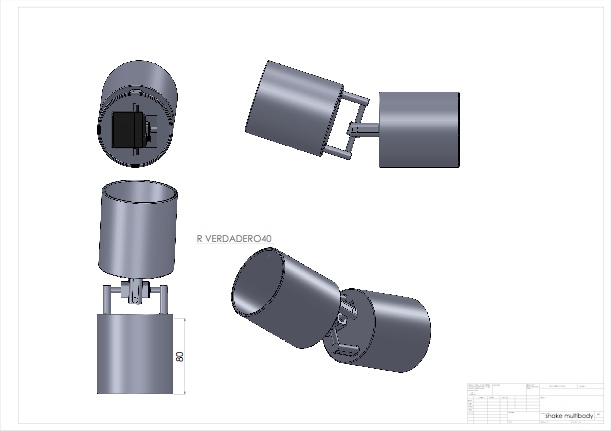
Assembly of the 2 DOF Snake like link from different angles. This has been done with “drawing” in solidworks.

The body will rotate with x axis aligned with the 2 holes seen in previous figure. In those holes will be attached the next piece. This piece has a hole in the middle for the other DOF, and rotation in Y axis. the 2 axis of rotation will intersect in the middle of the following piece.

Then I downloaded a 3D model of a standard servo, in this case a Futaba, and made an assembly with the main body:

Afterwards, I assembled all the pieces:

Assembly from different angles.

ToDo: Think about mini servo vs big servo, in other words, the dimensions of the snake. Also, the mechanism from the servo to the link, could be a gear in servo with half circle gear in link, or with pulley.