John O'Keefe
Week 18 - Project Development
Equipment
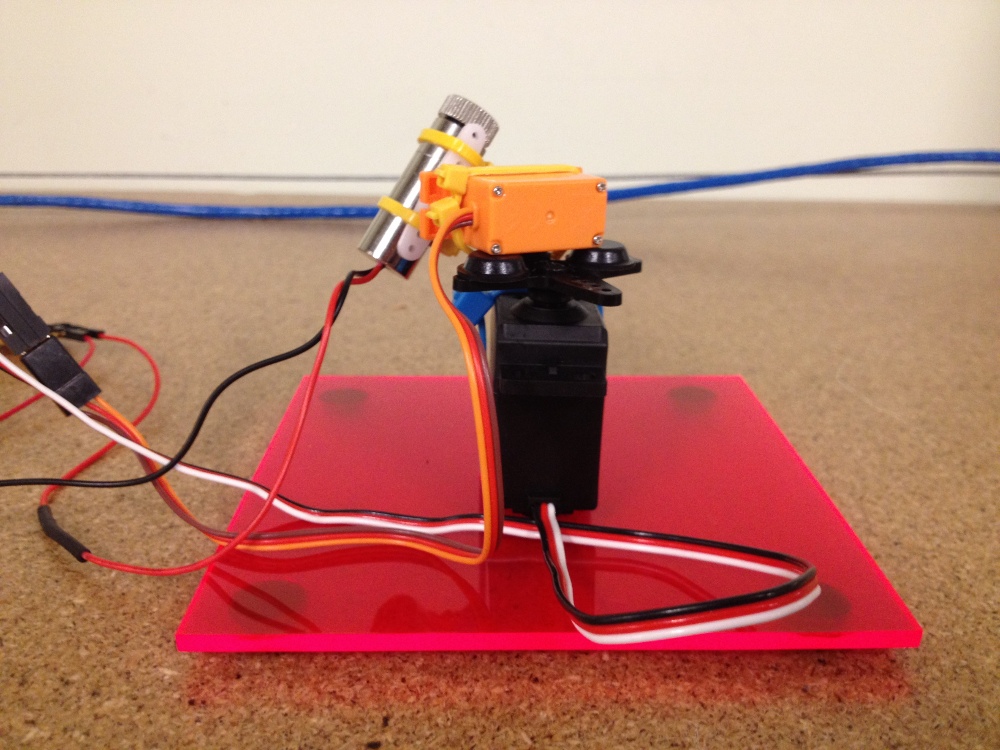
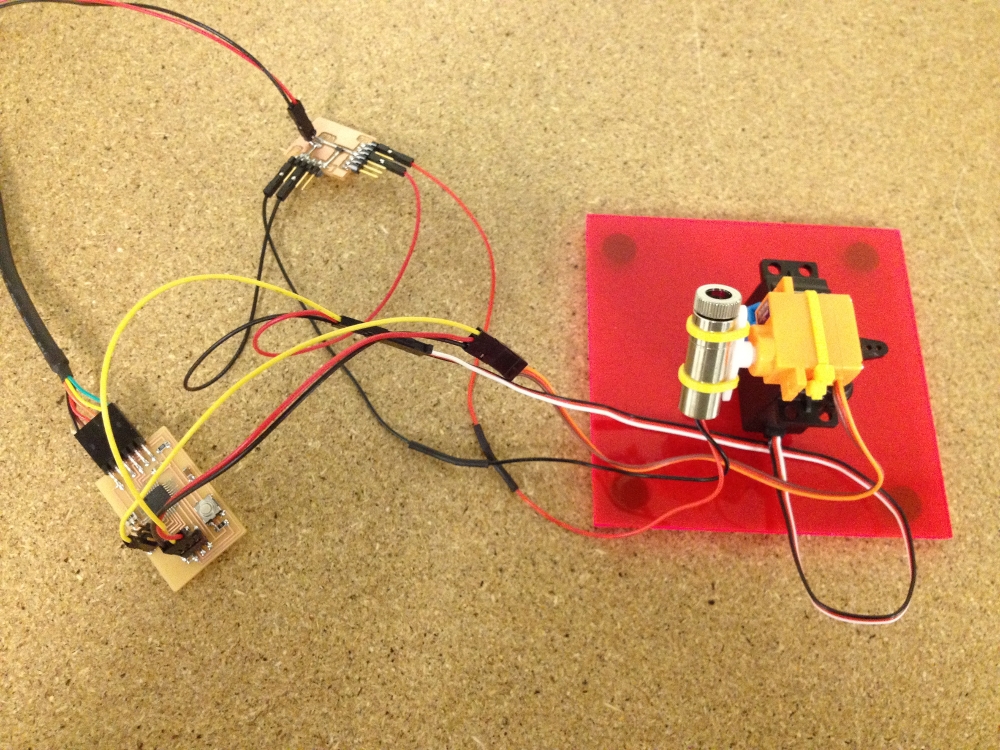 2 Servos, laser pointer, hello arduino, voltage regulator...
2 Servos, laser pointer, hello arduino, voltage regulator...
Arduino
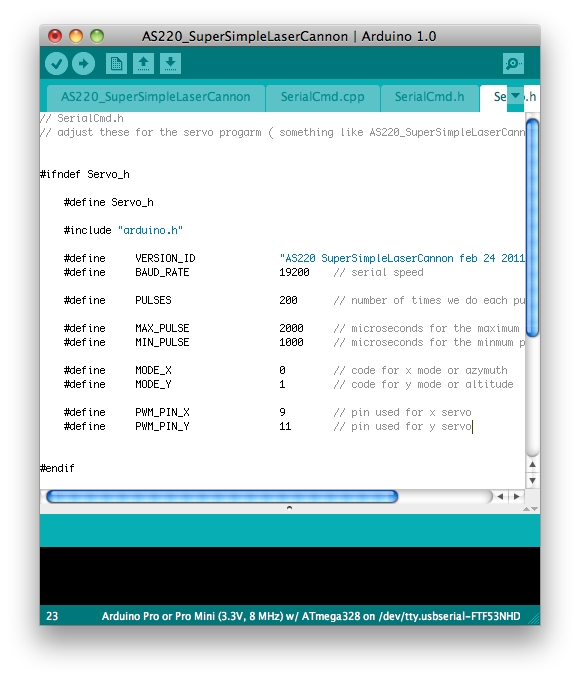 Russ Hensel's code tells the servos/laser to draw a square. Will have to do some math to have control over projection/perspective.
Russ Hensel's code tells the servos/laser to draw a square. Will have to do some math to have control over projection/perspective.
Drawing with the Laser Y axis should be centered directly over X - I believe that's why 'frame' swings up to the left. To do more intricate (and steady) drawings, it appears motors will need to be stronger? Or steppers?
Laser Portal
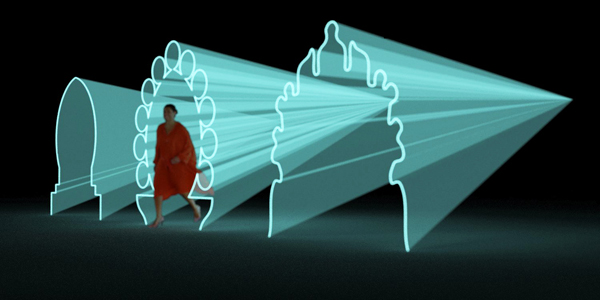 I will need to build a doorframe/scrim to catch laser beam, allow people to walk through. Ideally, a motion sensor will trip the laser, which will draw arabesque doorframes translated from vector (or bitmap like the fab modules) drawings into toolpaths?
I will need to build a doorframe/scrim to catch laser beam, allow people to walk through. Ideally, a motion sensor will trip the laser, which will draw arabesque doorframes translated from vector (or bitmap like the fab modules) drawings into toolpaths?