
The machine will pick a smd device from a dispenser and place it on a pcb. The purpose is to automate the stuffing of the circuit boards, enhancing precision and confiability, and saving time also.
There are commercial machines (which are expensive) and also DIY machines.This machine is in the concept of the MTM machines, ie low cost machines that can be made with the tools available in a Fab Lab. By the type construction this machine is also known as MTM snap.
Figure 1. Commercial (1st and 2nd) and DIY pick and place machines (Red frog DIY PnP Machine)
The machine cabinet is based in the MTM machine snap lock system, we have changed the form of the cabinet (proposed in assignment 2) to allow ease of positioning of the board to be assembled, it also will have a dispenser for the components, as shown in the computer design assignment. The dispenser will be printed with the 3D printer as shown in the week assignment.
The prototype cabinet will be manufactured in MDF (Medium Density Fiberboard) and for the final cabinet we will use probably HDPE (High Density Polyethylene)
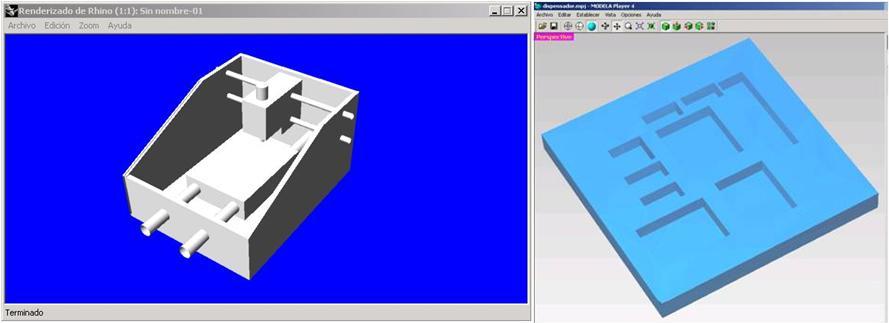
Figure 2. Cabinet and dispenser as proposed in assignments 2 (computer aided design) and 9 (3D scanning and printing)
The z axis will hold a pick and place tool which is build with a hypodermic syringe, wire spring and a vacuum pick up tip.

Figure 3. Pick and Place tool build with a syringe, a wire spring and a vacuum pick up tip
For the X-Y-Z movement, we will use stepper motors, these motors will be drived by an electronic controller made with the Allegro A3982 Stepper controller, following the design of the Arduino shield for the MIT MTM. We will also use an Arduino for developing the program and once the program is finished we expect change it by a Fabduino like the designed by Andy Bardagjy Anduino.
We planned to buy locally some of the mechanical components and materials, but we couldn't got them with the necessary tolerances, although we are going to use them in the prototype. All the electronic components must be imported also.
I include the complete bill of materials PnP Machine BOM
It will cost about $600 Dollars with imported components. After finishing the project we can establish what components could be replaced by local components in order to reduce the cost.
The following parts will be made
The cabinet for the X-Y-Z movement and the tool base
The dispenser
The pick and place tool
The Arduino's electronic shield for motors control
The program for the machine control
Machine design: To be finished on May 22
Manufacturing and assembling the cabinet: May 23 to May 25
Manufacturing and assembling the electronics: May 26 - 27
Making the program: May 25 to May 28
Final test: May 29
It will be evaluated by the following:
We are on the way to the goal