Image Description
Working mechanism behind stepper motor:
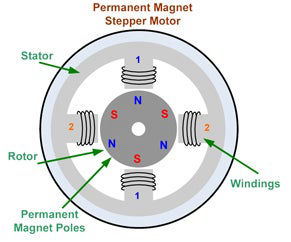
A stepper motor consists of two main parts, a rotor and a stator. The rotor is the part of the motor that actually spins and provides work. The stator is the stationary part of the motor that houses the rotor. In a stepper motor, the rotor is a permanent magnet. The stator consists of multiple coils that act as electromagnets when an electrical current is passed through them. The electromagnetic coil will cause the rotor to align with it when charged. The rotor is propelled by alternating which coil has a current running through it.