Final Project
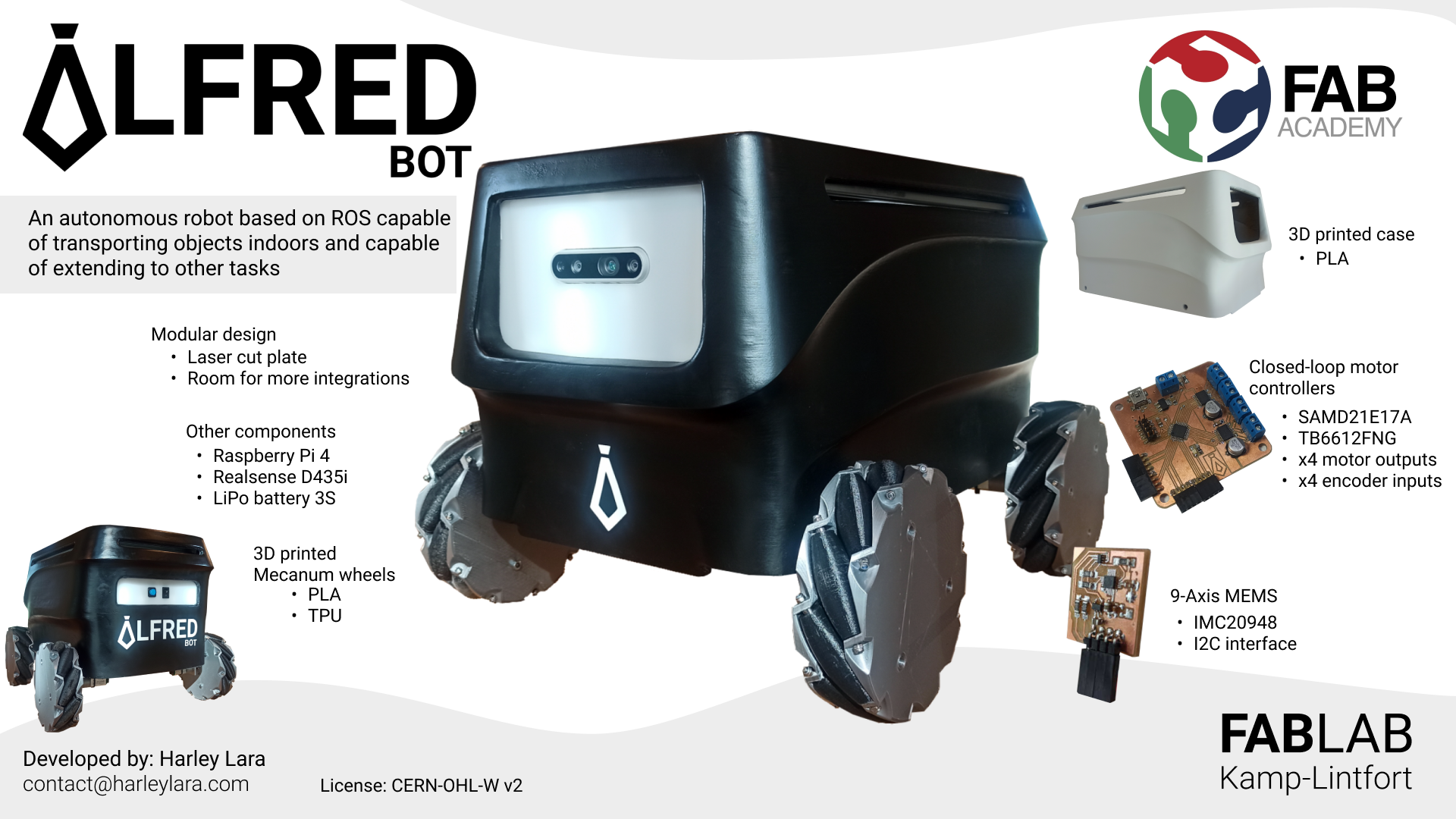
My final project is an autonomous wheeled robot which I call AlfredBot comes from the idea of creating a platform to transport objects within the FabLab. Internally it consists of a Raspberry Pi 4 B running ROS and communicating with a closed-loop motor controller via serial communication. It also has an Intel Realsense D435i which is a depth camera for autonomous mapping and navigation.
You can find the bill of materials in this link
CERN Open Hardware Licence Version 2 - Weakly Reciprocal txt pdf
3D printed Case and plates
Mecanum wheels
Closed-loop motor controller
- Closed-loop motor controller - KiCad Project
- Full board front/back - SVG format
- Images for milling - PNG format
- Milling files for SRM-20 - RML format
- Firmware - Arduino file
- ROS package
9-axis MEMS
- Fab IMU - KiCad Project
- Full board - SVG format
- Images for milling - PNG format
- Milling files for SRM-20 - RML format
- Fab IMU - Tutorial
{kind=link}
Internal frame