Final Project: Maker Derby Raceway
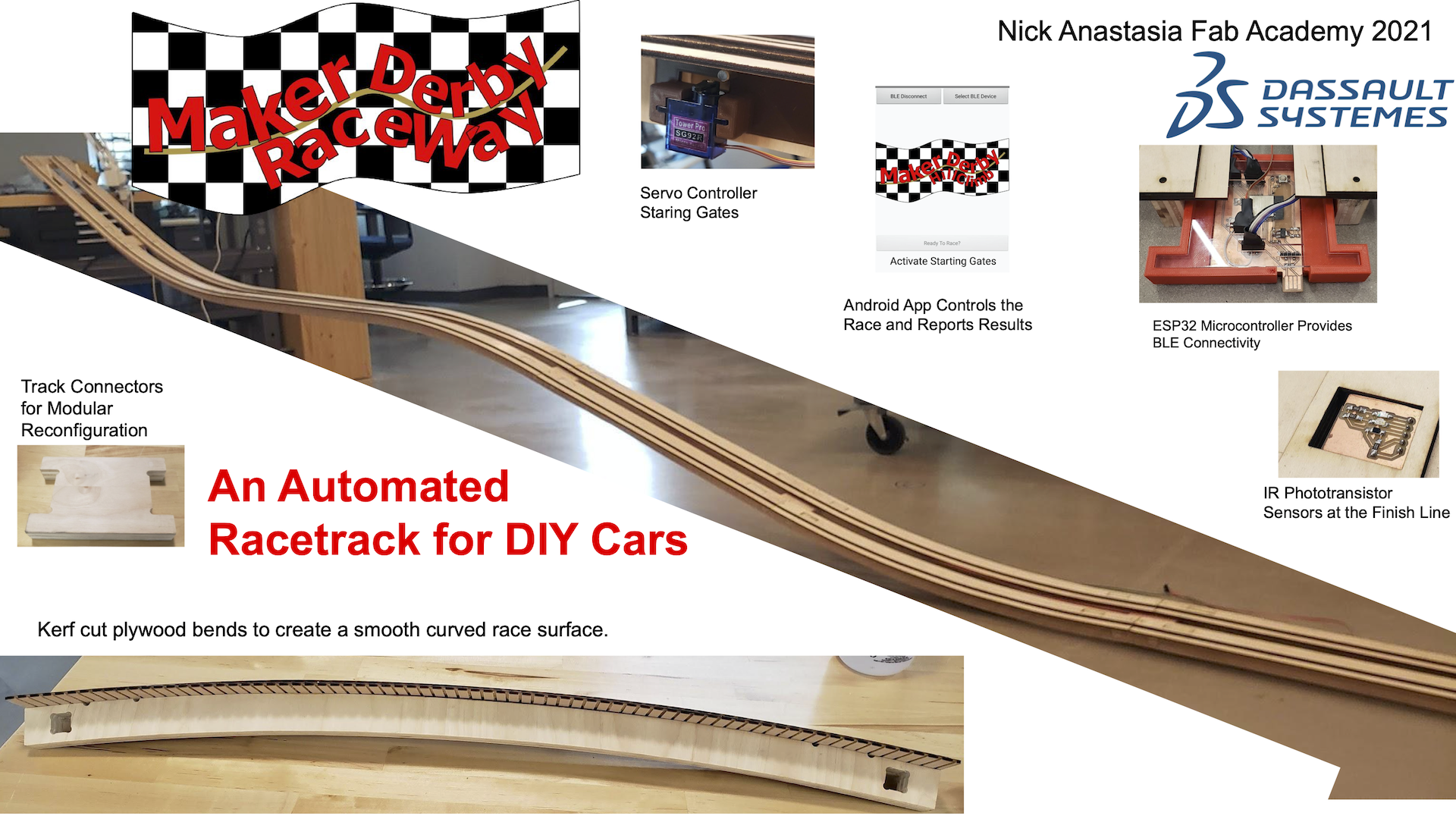
Maker Derby Raceway is a new spin on an old idea of the pinewood derby race. My plan is to make a modular track that can be reconfigured on the fly for a more interesting race course. The track will have a timing system built in to determine the winner of each race. Later I will design car kits that can be used to customize a motorized car that will be able to drive up the track or a traditional gravity powered racer.
I discussed a bit of my research into existing racetracks in Applications and Implcations Week.
Components:
Track

The track is made of modular sections which have a 3/4" plywood spine and a 1/8" plywood track. There are 3 different sections flat, curved up, and curved down. There are specialized flat sections for the starting and finishing lines. There is also an H shaped connector that links the modular sections together and holds two lanes parallel.
Each track segment has a spine with a tab on either end to align the deck segments. The deck is made of 3 layers of 1/8" plywood. The bottom layer is 3" wide to support the wheels and the 2 upper layers are 1.5" wide to act as a guide so the cars drive straight. Each spine has a square hole in the end that is precisely aligned to match the H shaped connector so any segment can align with any other.
For the curved sections of deck I made kerf cuts along their length to let it bend more easily. I used a 1/8" end mill and cut 0.08" deep cuts spaced 3/8" apart. I made these cuts on entire 2’x3’ sheets of plywood and then laser cut the shapes to fit the track segments.



Finish Line

The finish line segment has a cut out for a sensor board at one end. I started on the timing electronics in the input devices week using an active IR LED and a phototransistor to detect when a car passes. A sensor will be embedded in each lane of the track at the finish line. The starting line will just use a simple switch to detect the start of the race. The breakout board for the finish line has an IR LED, and IR phototransistor to sense the car passing, and a Green LED to indicate a winner. I has the resistors for the LED and uses through hole headers sticking down through the track as a connector to the main control board.
Starting Line
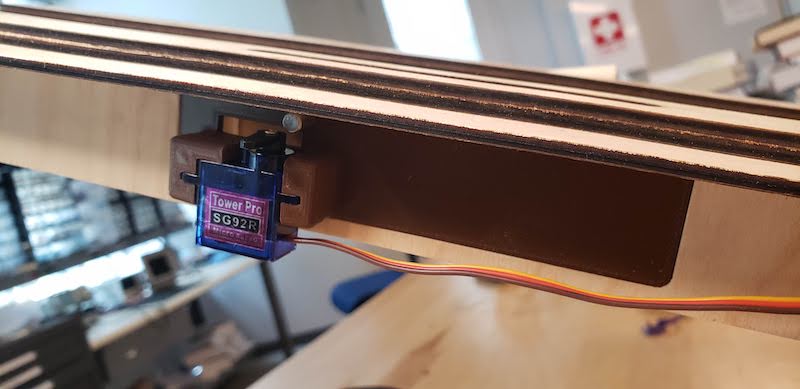
I developed two different starting lines that can both slot into the same track segment. The track has a double sided machining operation to create the cutout in the spine that the starting gate slots into. The side plates on that cutout are press fit into it and hold a horizontal pin that the starting rod pivots on. The manual starting gate has an L shaped cut out that a dowel slots into across both lanes and it can be pulled up and back to release the gates. I had a bit of extra time and added in an electronic starting gate. I created 3d printed side plates for the starting gate that hold a servo to actuate the start.
Electronics
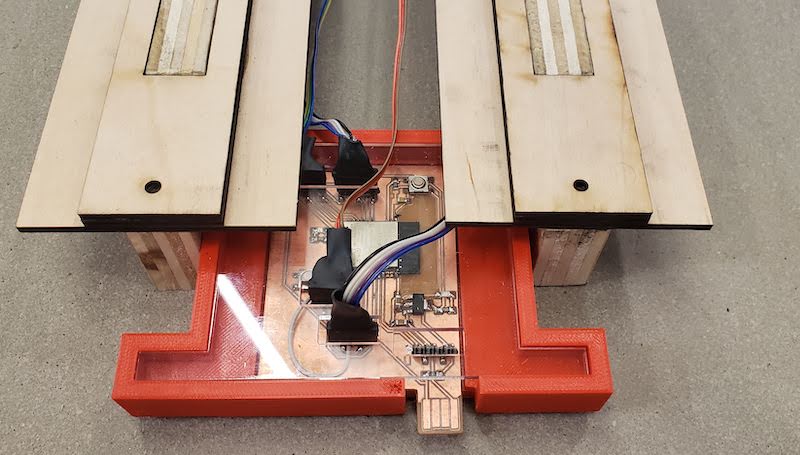
I designed a circuit board for an esp32 microcontroller that had 2 connections per lane of track one for the starting line and one for the finish line. The board also has a power LED, a programmable LED as well as an FTDI header for programming and a board USB connector for 5V power. I 3D printed an enclosure for the board. The enclosure is a hollowed out duplicate of the track connector with cavity to hold the circuit board. It has a laser cut acrylic cover with holes for the breakout board, servo, and programming connections.
Interface
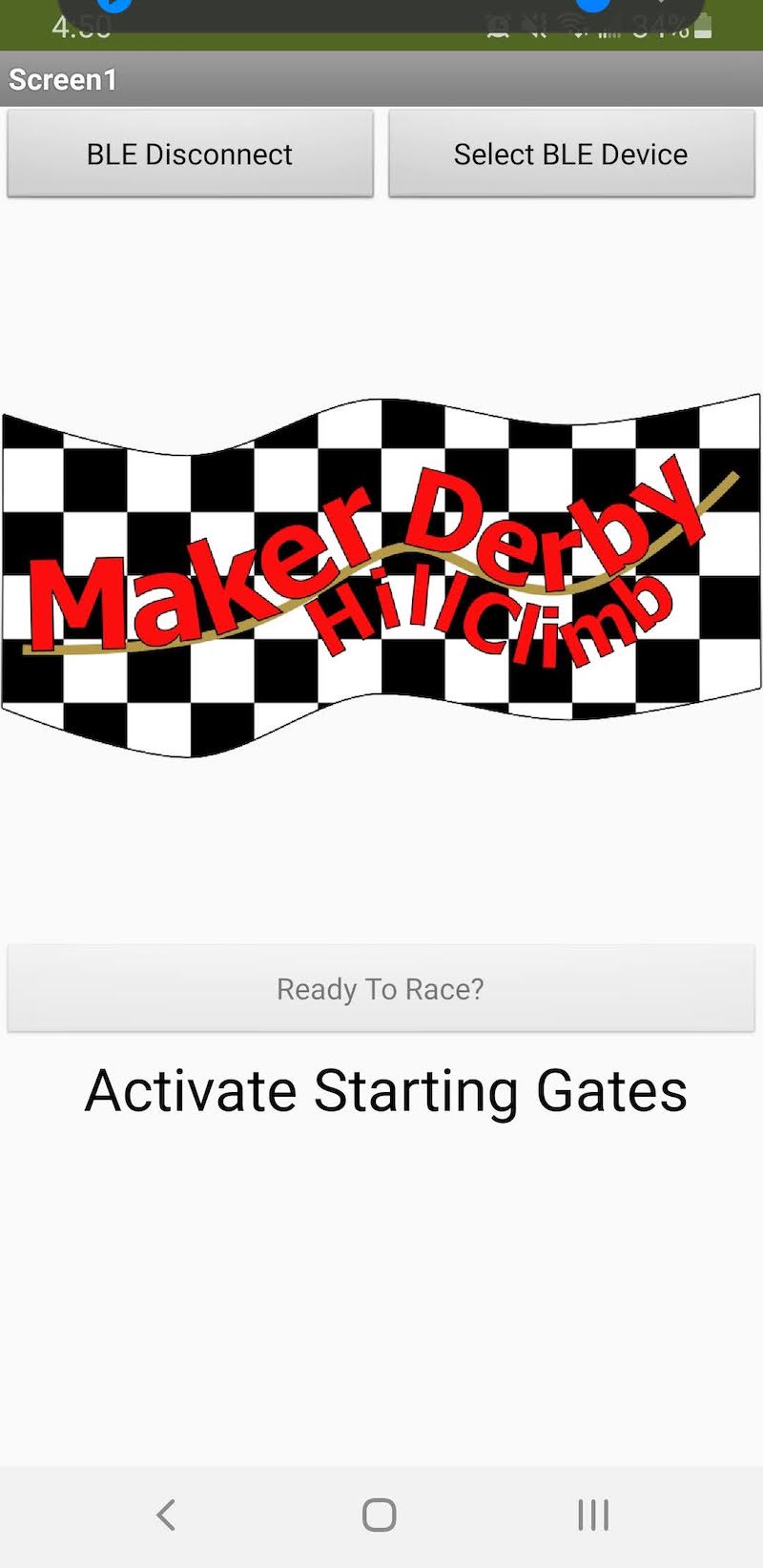
The track is controlled by an Android app written in MIT App Inventor. It connects to the esp32 over Bluetooth LE. The app is fairly simple for now. After connecting you hit ready to race and it engages the start gates. Then you hit go and the start is released. Then after the race finishes the Green LED at the finish line lights up to indicate the winner. Then you can click who won on the app and it will tell you which lane finished first. It doesn’t currently actually tell you the race time. I only added the automated starting gates the day before presentations but that can be added easily now.
This video shows a screen recording cut with actual video of the track in action.
BOM
Track Construction:
| Material | Quantity | Source | Cost | Process |
|---|---|---|---|---|
| 3/4" Plywood | <1 4’x8’ Sheet | Boulter Plywood | ~$80 | ShopBot |
| 1/8" Prefinished Plywood | ~6 2’x3’ Sheet | Boulter Plywood | ~$50 | ShopBot & Laser Cutter |
| 1/4" Dowel | 1 | Parts Pile | - | Hand Saw |
| Wood Glue | ? | Lab Inventory | - | - |
| PLA Filament | ? | Lab Inventory | - | 3D Printing |
| Clear Acrylic | 6"x6" | Lab Inventory | - | Laser Cutter |
Electronics:
| Material | Quantity | Source | Cost |
|---|---|---|---|
| FR-1 Board | 1 | Lab Inventory | - |
| ESP 32 Microcontroller | 1 | DigiKey | ~$3 |
| Button | 2 | DigiKey | - |
| Headers | 6 | DigiKey | - |
| IR LED | 2 | DigiKey | - |
| IR Phototransistor | 2 | DigiKey | - |
| Green LED | 2 | DigiKey | - |
| RED LED | 1 | DigiKey | - |
| Resistors | - | DigiKey | - |
| Capacitors | - | DigiKey | - |
| Ribbon Cable | 20ft x 6 conductor | DigiKey | - |
| Headers | ~ | DigiKey | - |
| Voltage Regulator 3.3V 1A | 1 | DigiKey | - |
| MicroServo | 2 | Adafruit | ~$5 |
Design Files
These files are released under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.