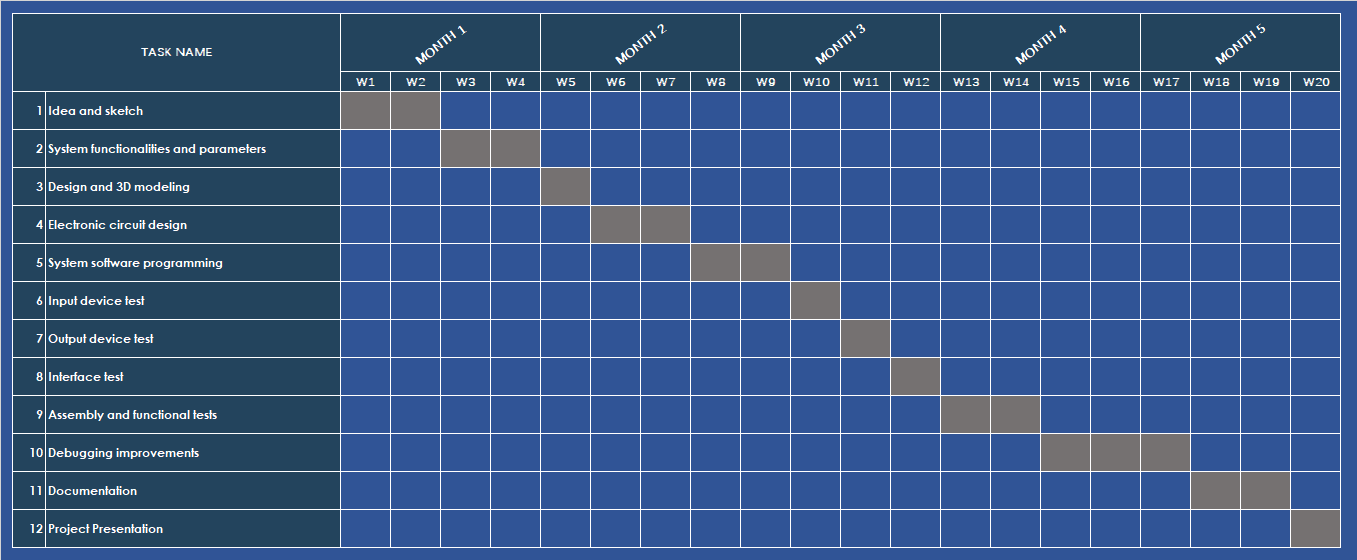
Project planning
The project planning was instrumental in prioritizing activities and ensuring effective time management to achieve the project's desired quality and success. It provided a structured framework for organizing tasks and allowed for better control over the project's execution.
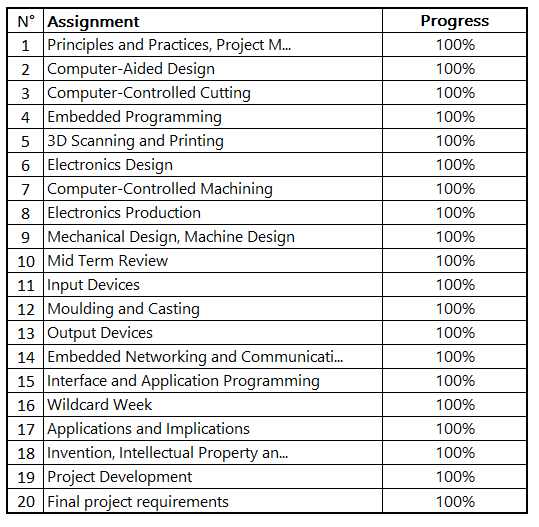
Assignment progress
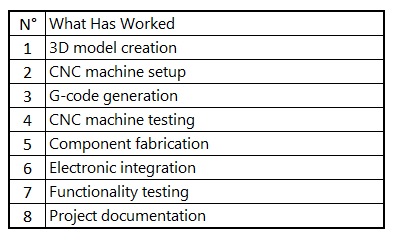
What has worked?
Key learnings
Development

The device configuration process was verified in a patient with an incipient state of the disease, where the symptoms presented were associated with loss of polyarticular movement, that is, more than four joints being affected and a slight decrease in joint mobility, with no presence of nodules. The preliminary study started from the verification of the exoskeleton prototype's efficacy by taking into account the degrees of freedom (GDL) necessary for the treatment of the disease, the mechanical analysis of the loads, the main stresses exerted, the resistance as a function of the shape and material, and finally the formal design of the prototype.
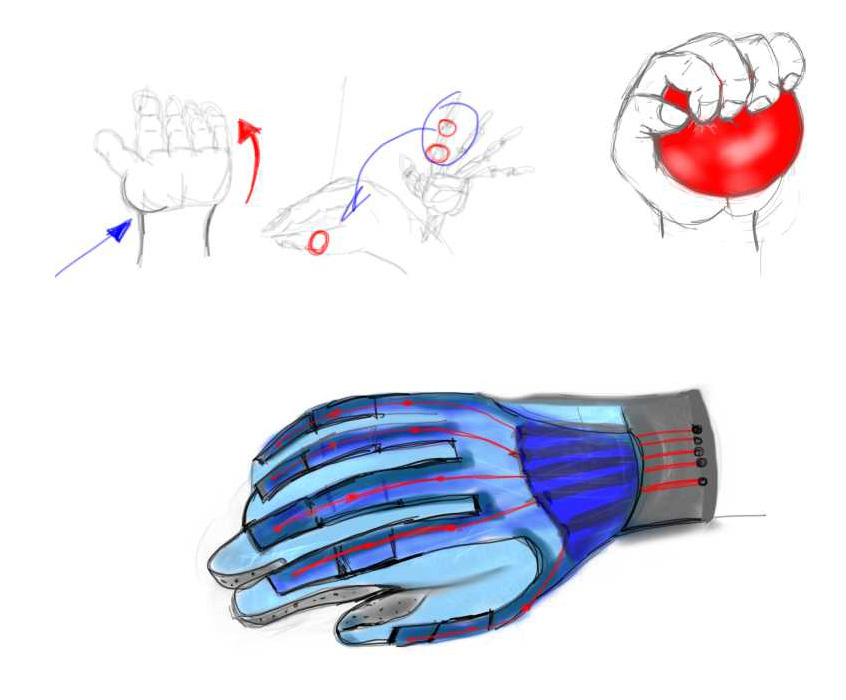
Digital tools and RP techniques were used to create a virtual 3D model from the digitization of a hand. It served as a three-dimensional reference to create the rehabilitation device prior to the design of a functional exoskeleton for muscular rehabilitation of the hands. In order to tangibly understand the limitations and scope of this type of techniques, virtual and physical tests were carried out to prepare a prototype of an arthritic hand, establishing real tasks and processes for the generation of a 3D physical model, that would later serve for the implementation of an exoskeleton for muscle rehabilitation. The study's finding suggested, in terms of mobility, that the articular arch of movement improved, reduced stiffness in joints, increased muscle stretching, reduction of pain and a decrease in the pressure around finger movement, which also meant a reduction in the possible appearance of tendon sheaths.
The development of the device began with an innovation to combine digital tools within the use of RP, 3D printing, alongside the possibility of providing a better quality of life for an individual who may require active rehabilitation and further ancillary treatment to their prognosis.
Details
Materials
| Name | Units | Units Price | Total Price |
| PLA filament 200 gr. | 1 | $ 6 | $ 6 |
| Servo Motors Torque no less that 1,5 gr. | 2 | $ 5 | $ 10 |
| Pair of gloves | 1 | $ 7 | $ 7 |
| Elastic thread | 1 | $ 10 | $ 10 |
| Flex sensor | 5 | $ 10 | $ 50 |
| Force sensor | 1 | $ 12 | $ 12 |
| ATMGA328 AU | 1 | $ 3 | $ 3 |
| Electronics suply SMD | 1 | $ 10 | $ 10 |
| ATtiny3216 | 1 | $ 1 | $ 1 |
| ATtiny412 | 1 | $ 1 | $ 1 |
| Other consumables (leds, tin, cables...) | 1 | $ 5 | $ 5 |
| Total | $ 115 |
It was a hard work but it worth it.
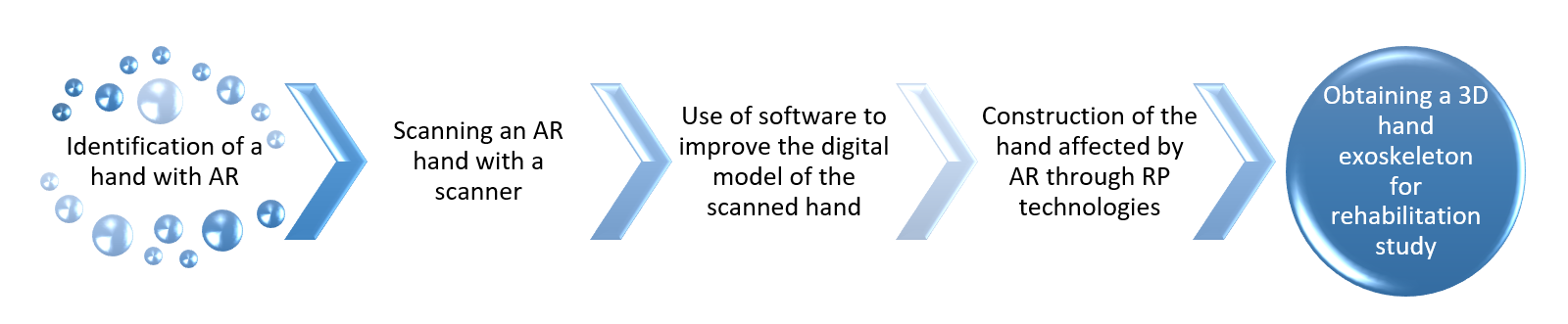
The process is summarized in the scheme presented below: which begins with the identification of a RA patient's hand, then with the use of RP technology, a digital hand is generated for improvement, then materialized to create a rehabilitation piece.
Sketch Process

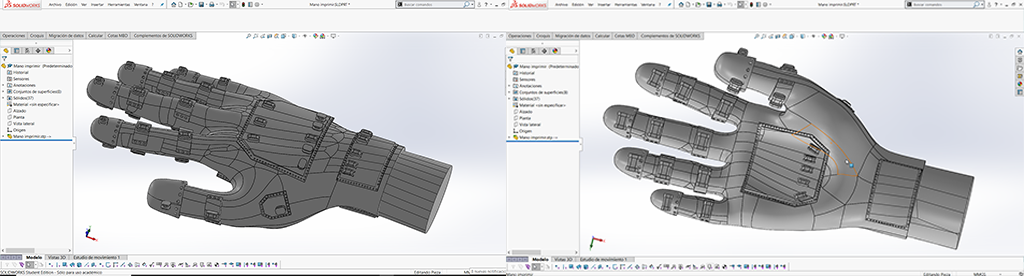
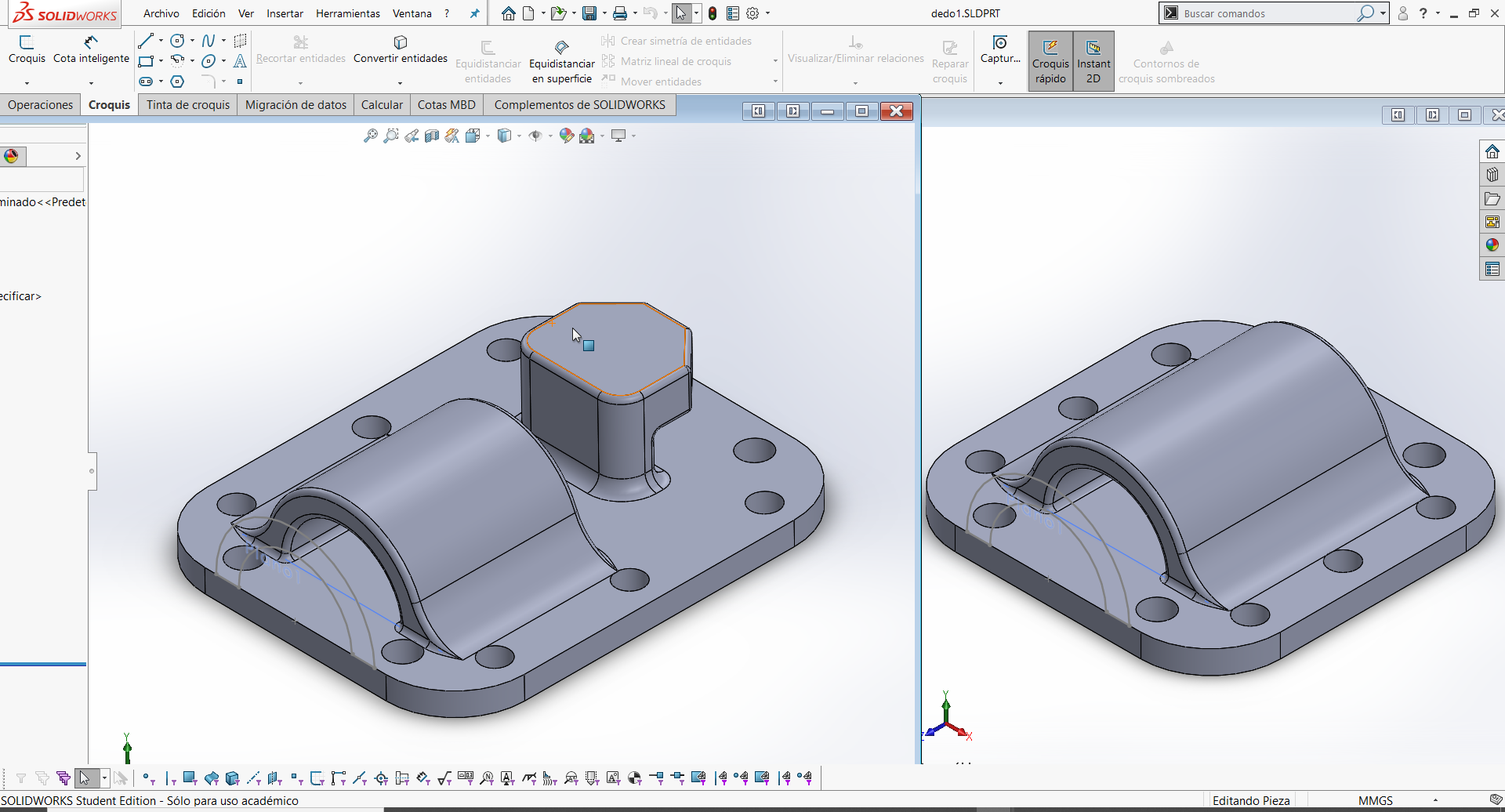
CAD Process
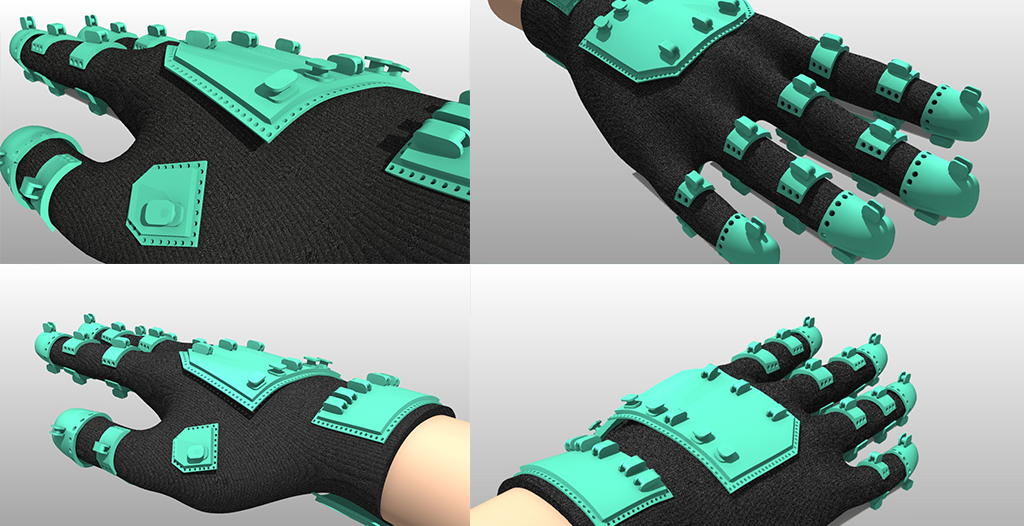
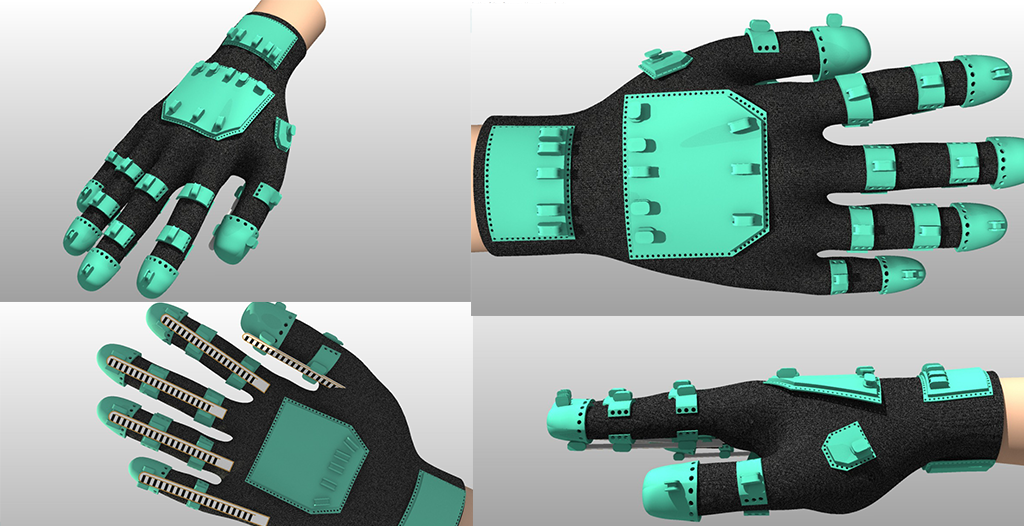
Rendering Process
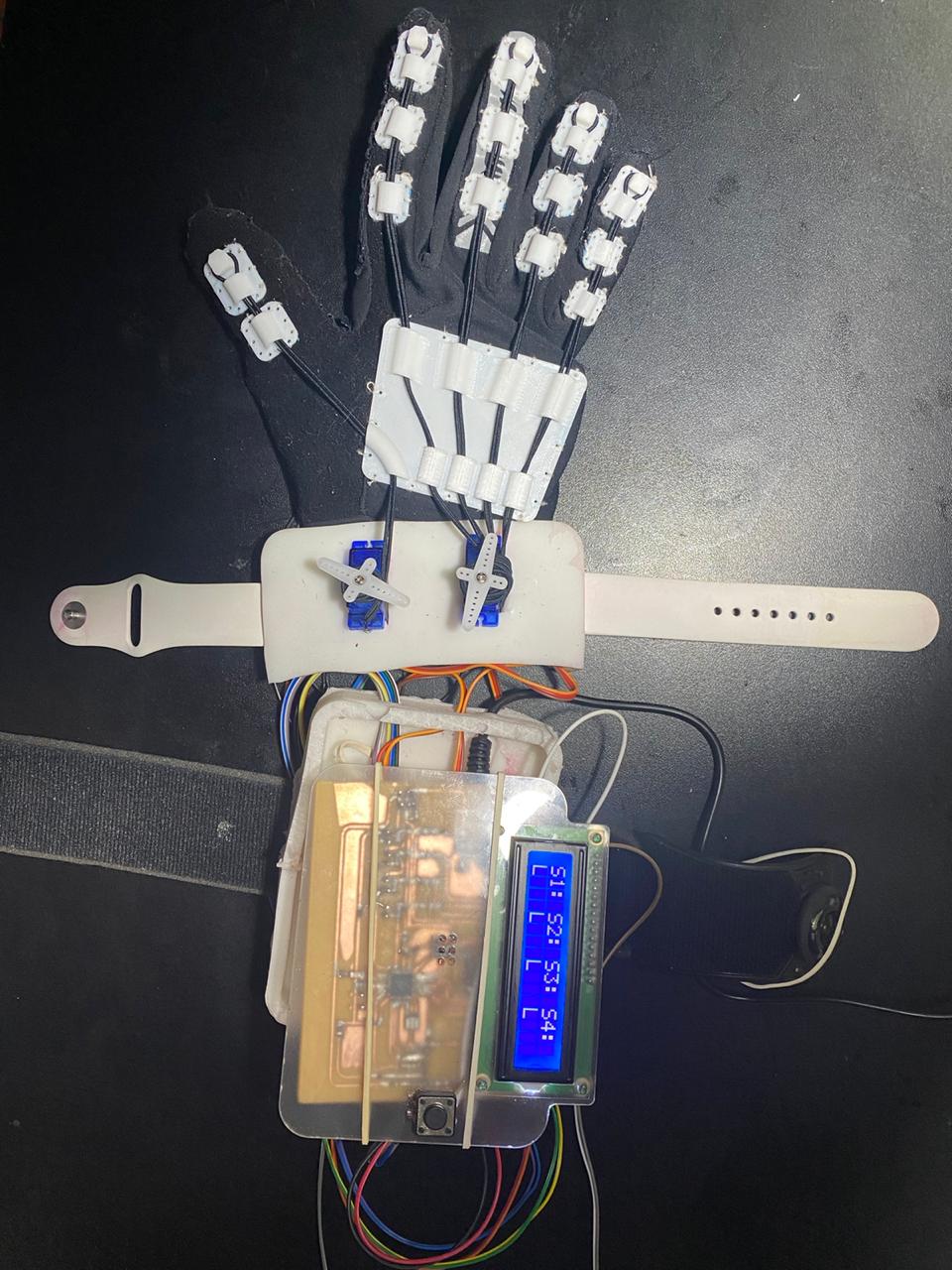
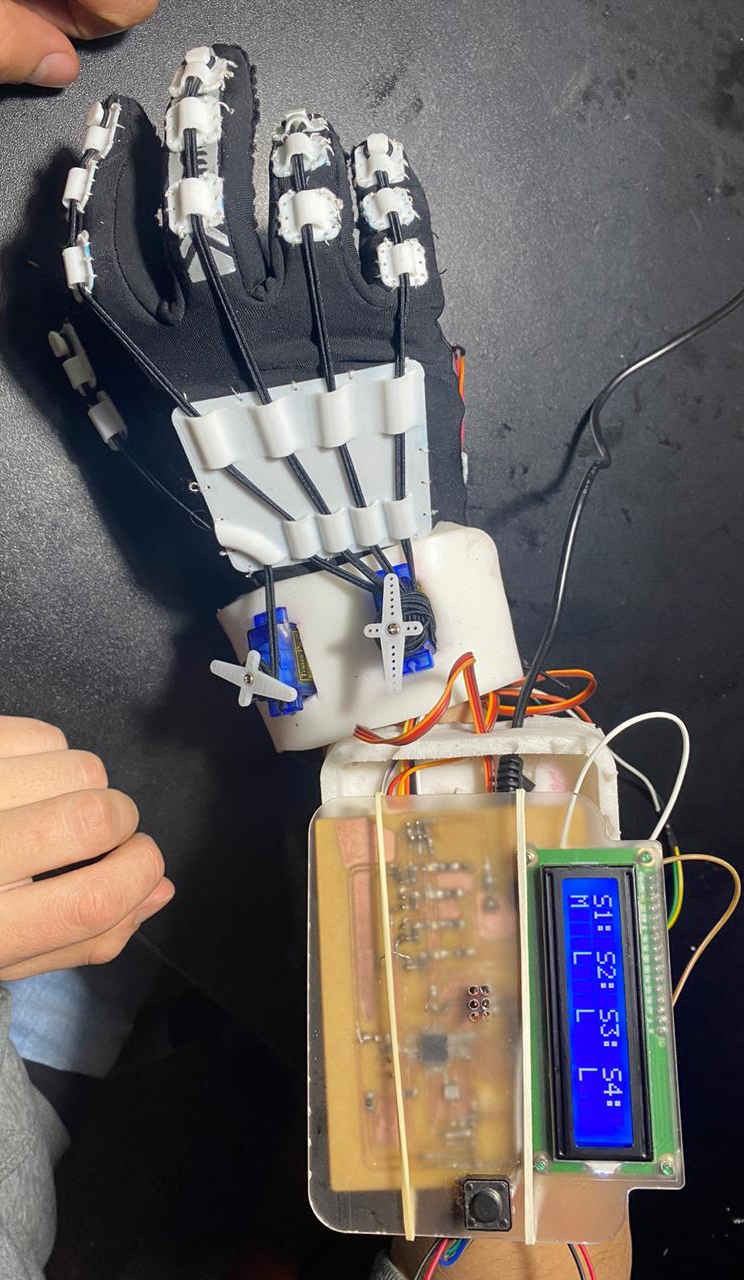
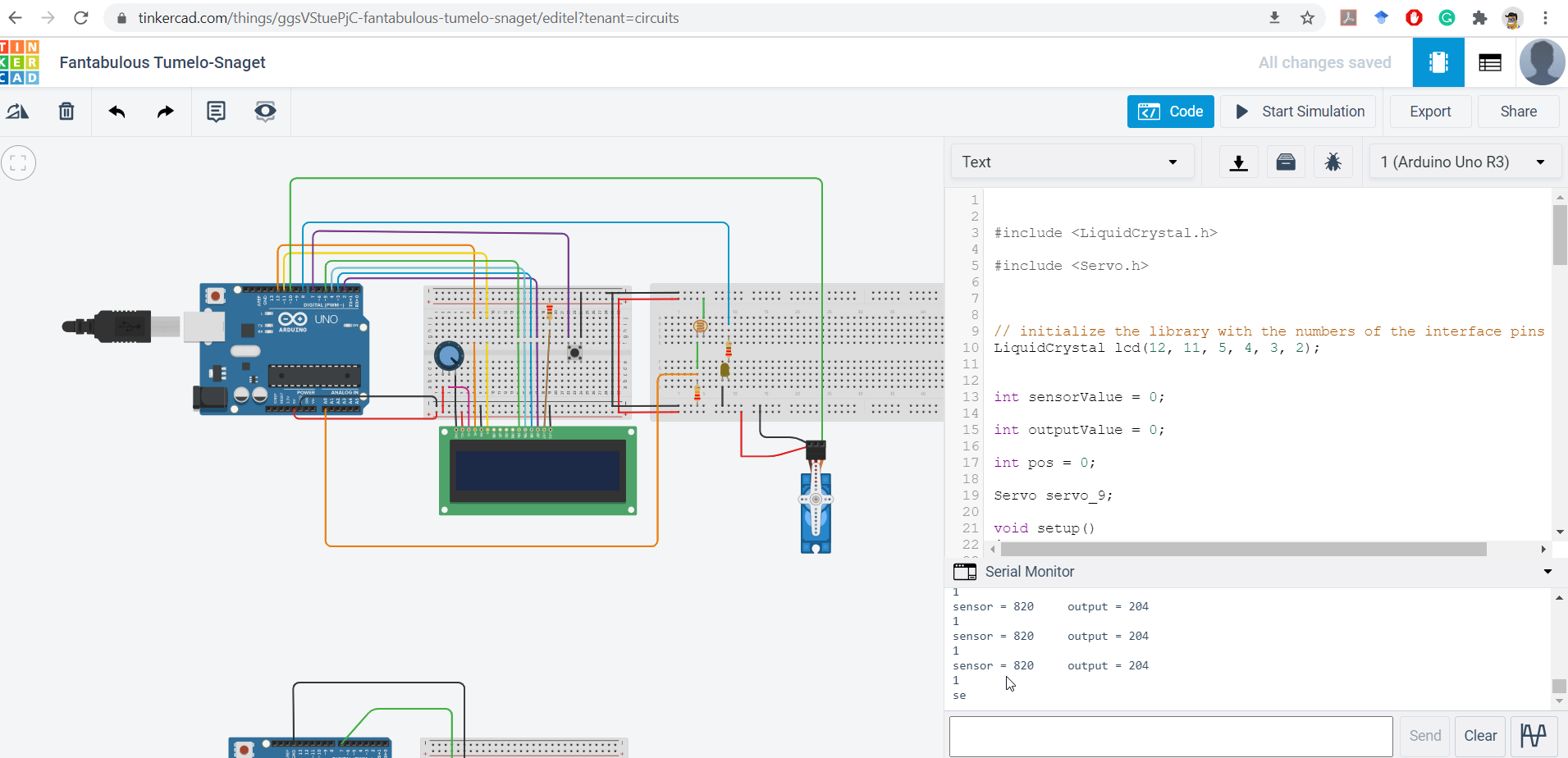
First test

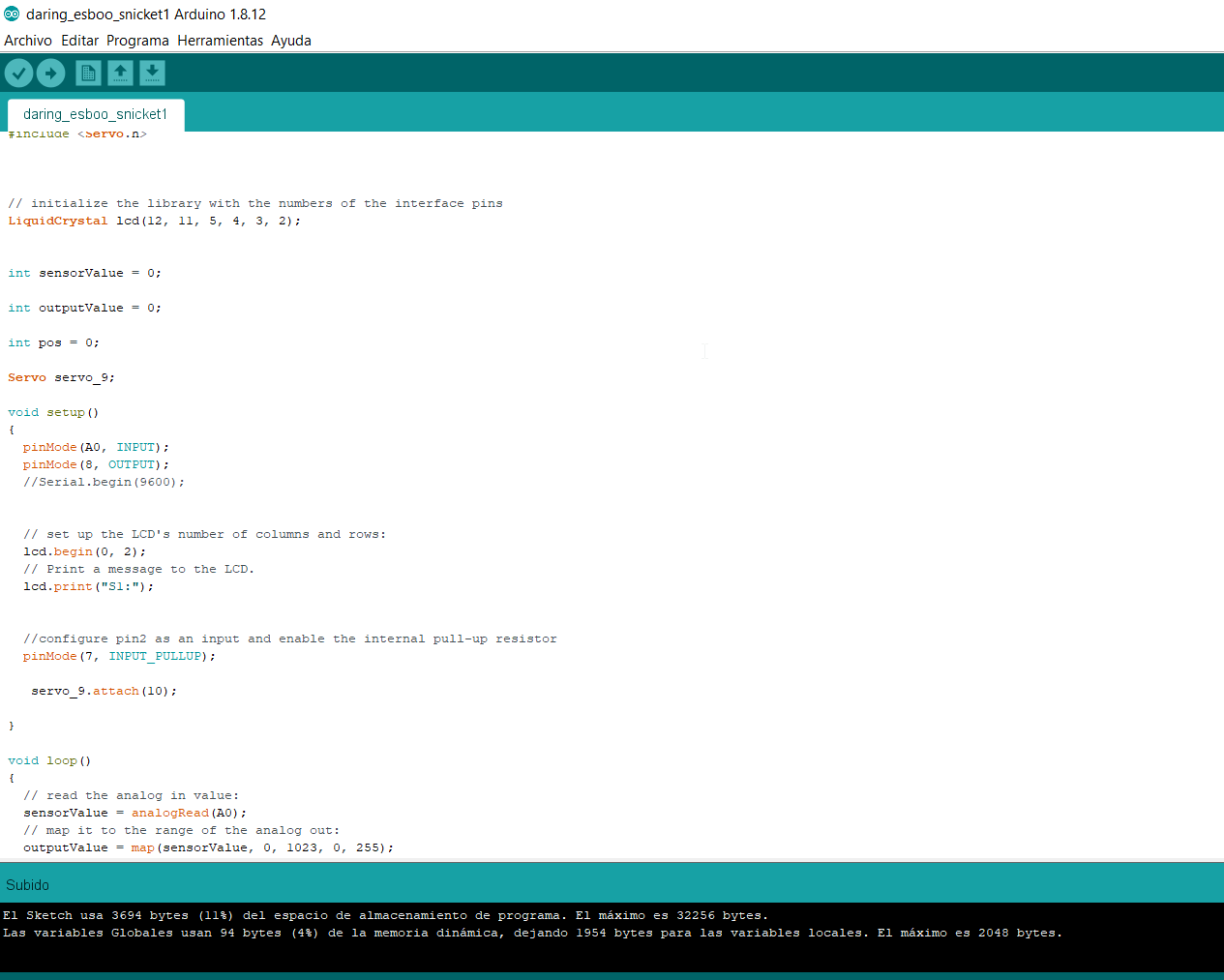
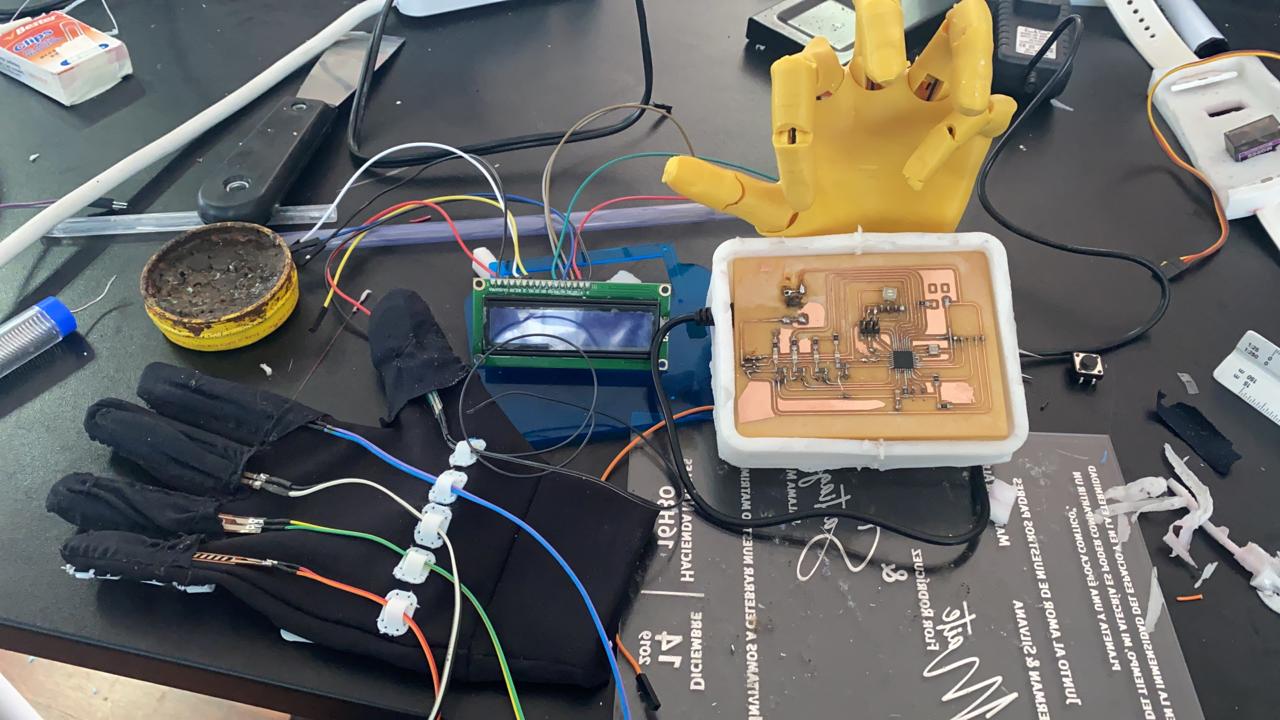
Arduino, LCD, Servo TEST
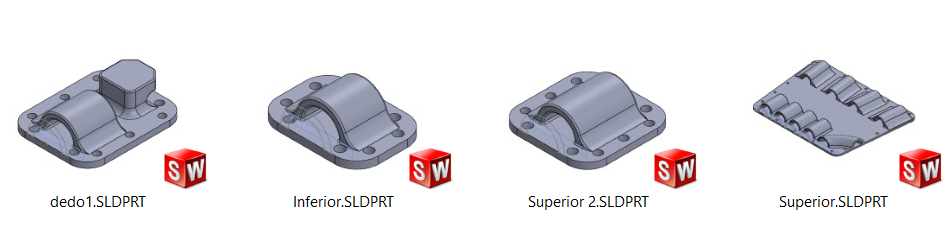
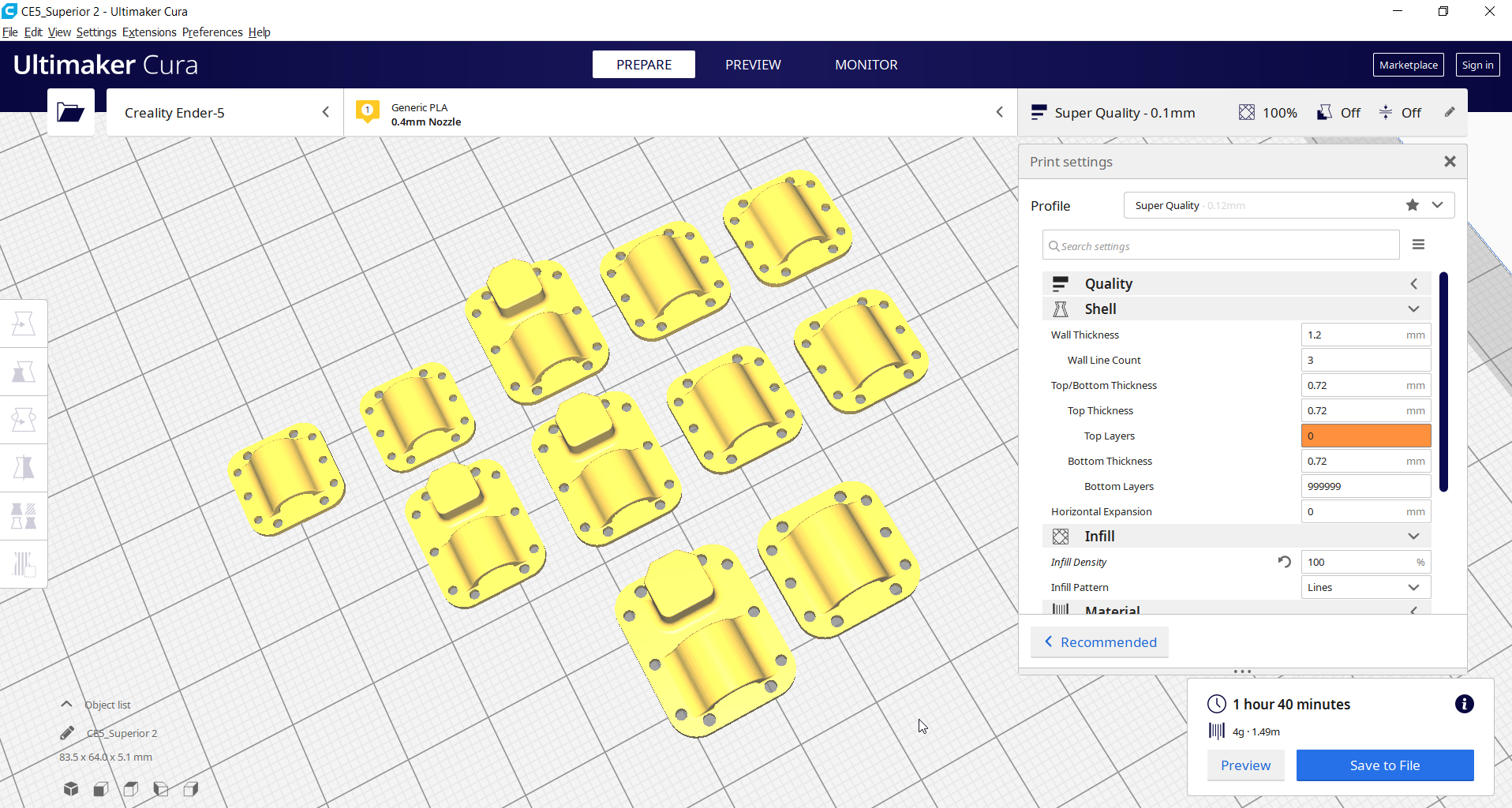
3D Modeling
3D Printing
Assembly
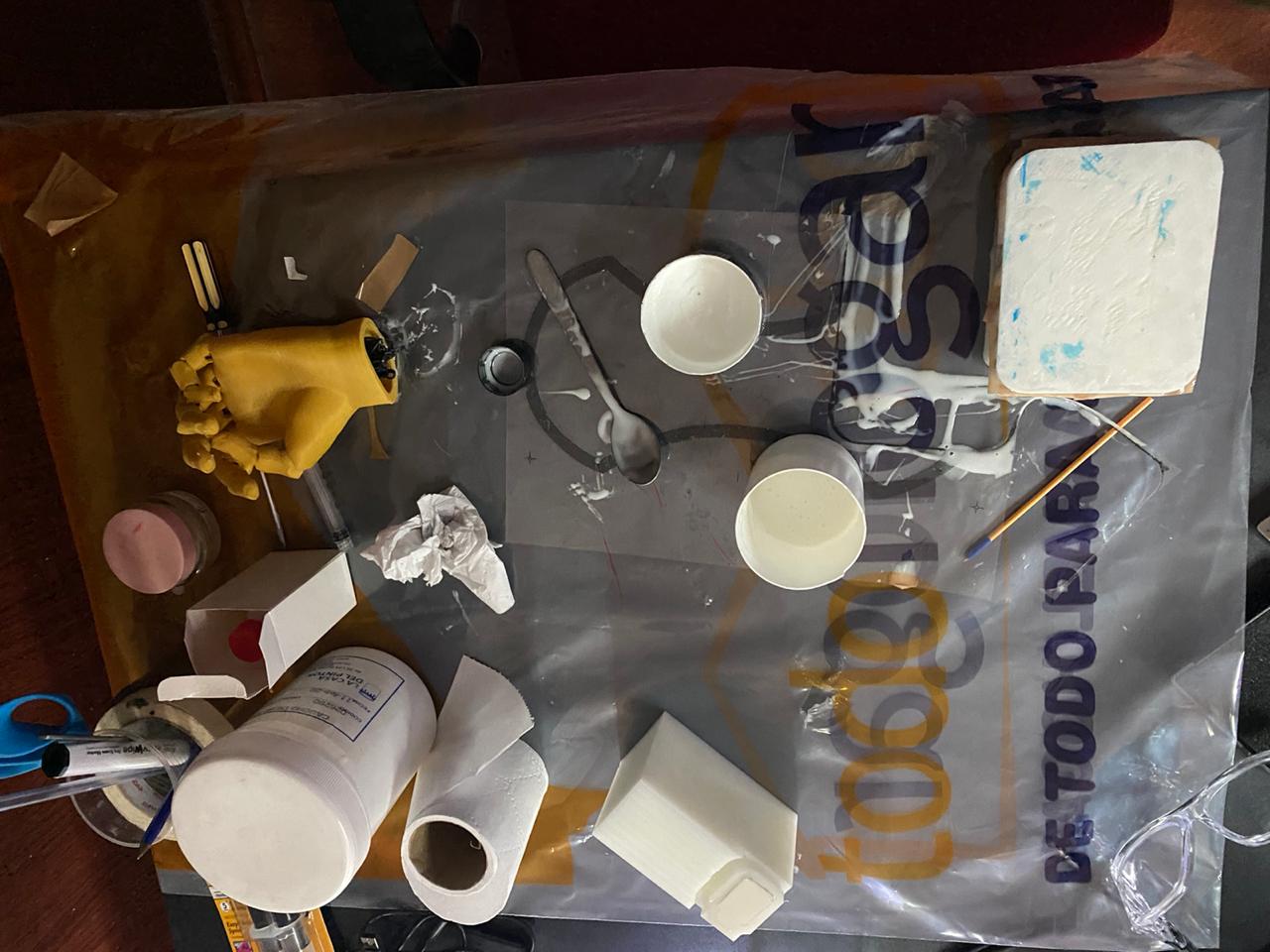
Molding
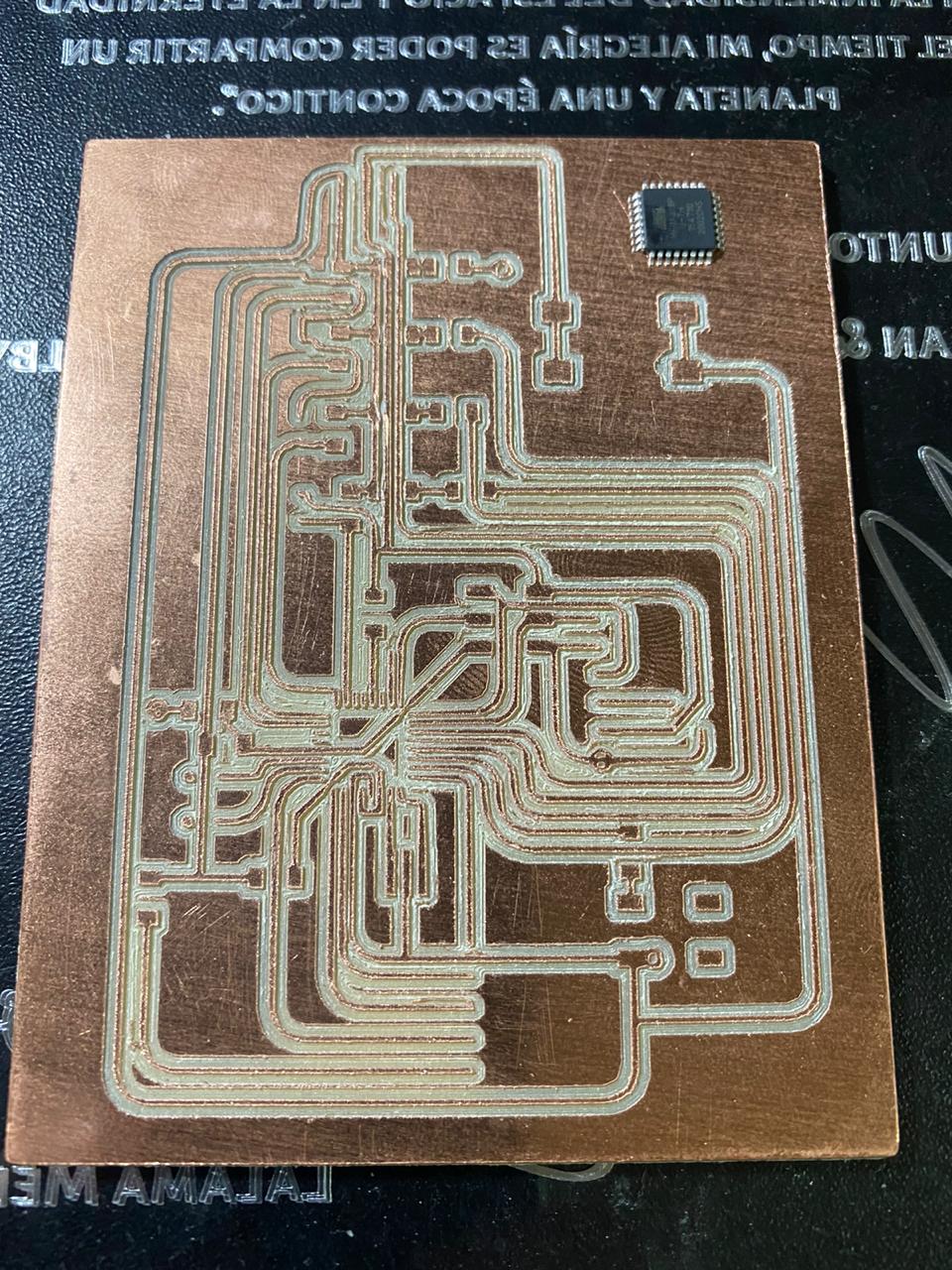
PCB