This page presents the assignments for week 11 of Fab Academy 2020: “Output Devices”.
To do list:
Group
- measure the power consumption of an output device
- add an output device to a microcontroller board you've designed,
- and program it to do something
Week 11 CAD files:
gimbal_controller.kicad_pcb (own work)
gimbal_controller.pro (own work)
gimbal_controller.sch (own work)
Sweep_test.ino (BARRAGAN and Scott Fitzgerald details inside)
Week 11 "hero shot":
Figure 0: Control a servo
Table of Contents
Group assignment
To do when the Fab Lab is open again.
Individual assignment
Add an output device to a microcontroller board that I have designed
Already done during week 8! :)
Schematics V3
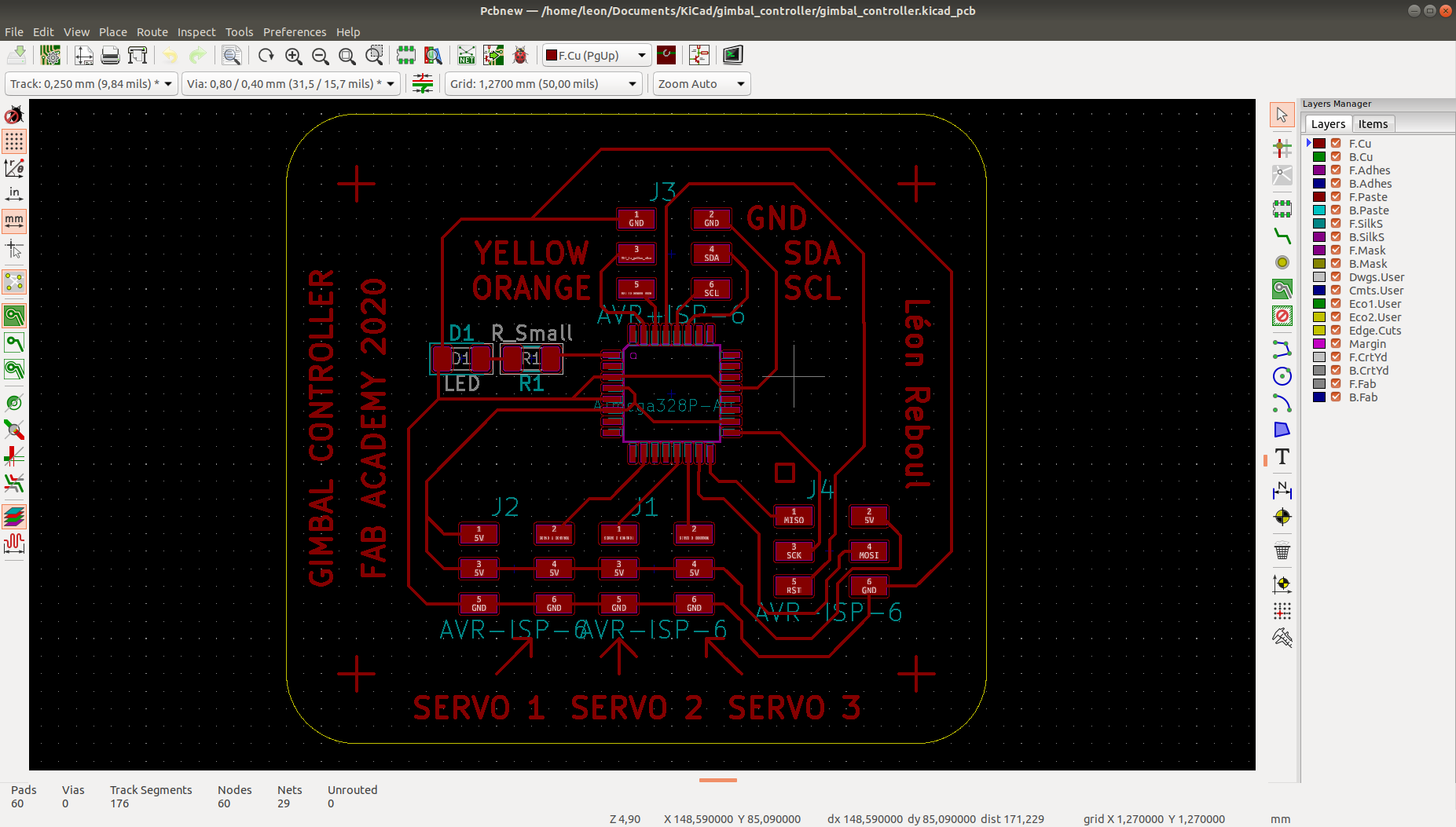
PCB layout V3
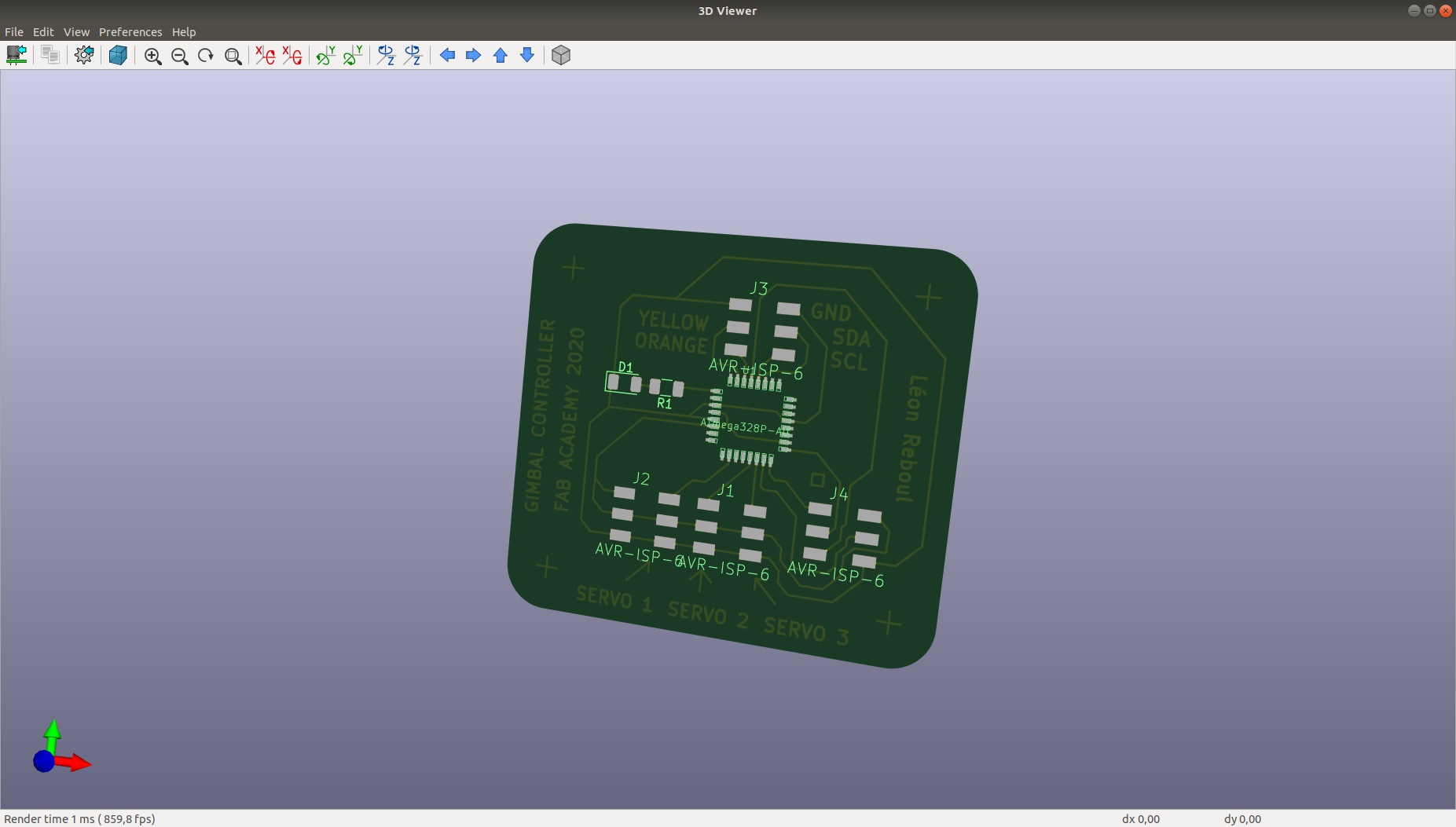
PCB 3D view V3

SVG for the laser cutter
Control a servo with my board

Sweep_test.ino
I simply use the demo code "sweep_test" from BARRAGAN as a programming process:
Include the library "Servo"
Define the object "myservo".
Define the integer "pos".
In the setup function attach the "myservo" object to pin 6. (PWM pin for arduino board and atmel A328p)
In the loop function
Do a for loop for pos starting at 0 and ending at 180 with an increase step of 1 to move the servo from 0 to 180 degree with a delay of 15 milliseconds between each degree.
Do a for loop for pos starting at 180 and ending at 0 with a decrease step of 1 to move the servo from 180 to 0 degree with a delay of 15 milliseconds between each degree.
The video below shows a longer single sweep.
Servo rotation
Add and program an output device to a commercial board
Work done during Covid lockdown
In this section, we will use a raspberry pi 3 with a NAVIO2 hat from EMLID to control servo of a drone.
Figure 6 shows a snapshot of the code
Video 1 shows IMU reading from Navio2 placed inside a fixed wing drone.
