There were different types of networking and communication learnt this week.
Synchronous Serial Bus:
Serial basically means sending one bit followed by another, rather than multiple bits over multiple wires simultaneously (which is parallel). A Synchronous system pairs its data line(s) with a clock signal, so all devices on a synchronous serial bus share a common clock. This makes for a more straightforward, often faster serial transfer, but it also requires at least one extra wire between communicating devices, Serial Peripheral Interface (SPI).
Asynchronous Serial Bus
Asynchronous means that data is being transmitted without support from an external clock signal/timer. The sender sends pulses representing the data to be sent at the agreed-upon data rate, and the receiver listens for pulses at that same rate.
In order to communicate, the two devices need to agree on a few things:
• the rate at which data is sent and read
• the voltage levels representing a 1 or a 0 bit
• the meaning of those voltage levels;- is a high voltage 1 and a low voltage 0, or is the signal inverted so that a low voltage is a 1 and high voltage is 0?
In this assignment I chose to work with Synchronous Serial Bus.
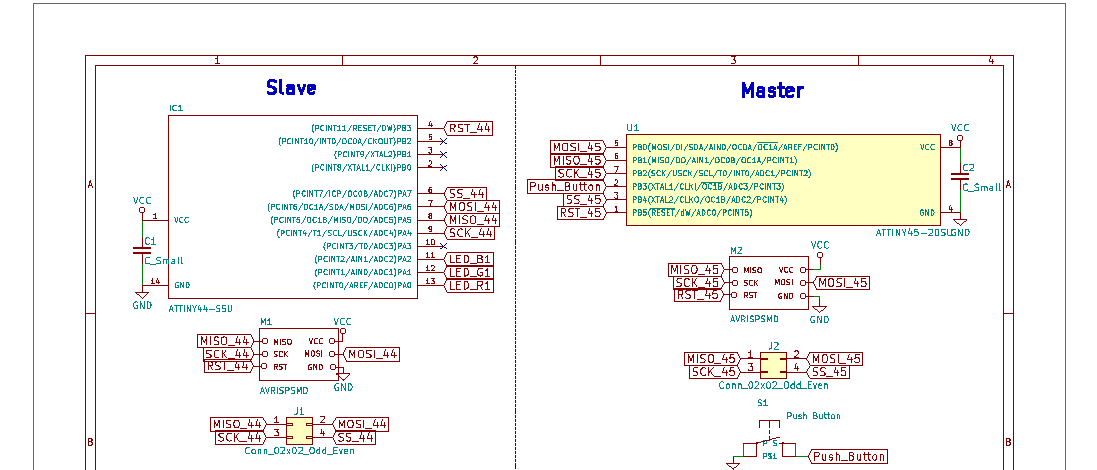
I used two different processors to communicate, ATtiny44 and ATtiny45. In designing these boards I used one schematic to easy the process.
On the master part I used an ATtiny45 with a push button to controll the RGB led on the slave side.
The slave part I used an ATtiny44 with an RGB led which will display different colours according to the signal sent from the master by the push button, the slave will give a feedback to the master after displaying a specific colour.
I started designing the two boards on the same schematic design, it was the first time I was trying this.
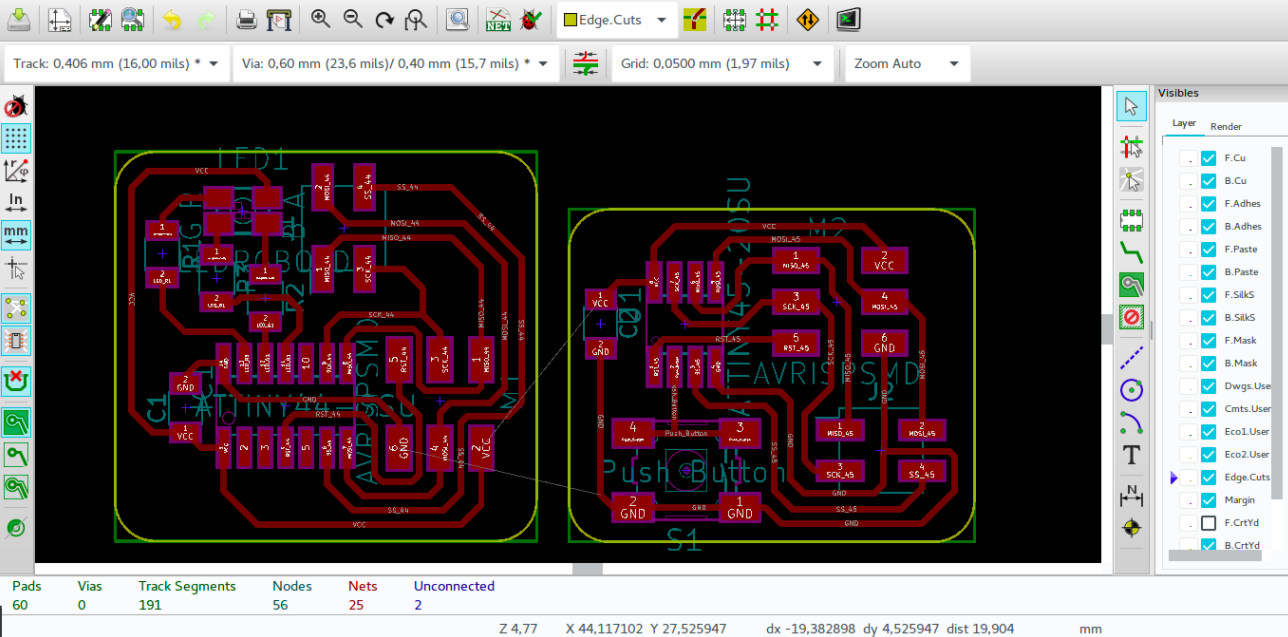
Moving to the board layout was easy to make those two boards, but the issue was that the both board had the same power connection, which resulted in two ratsnest left unconnected.
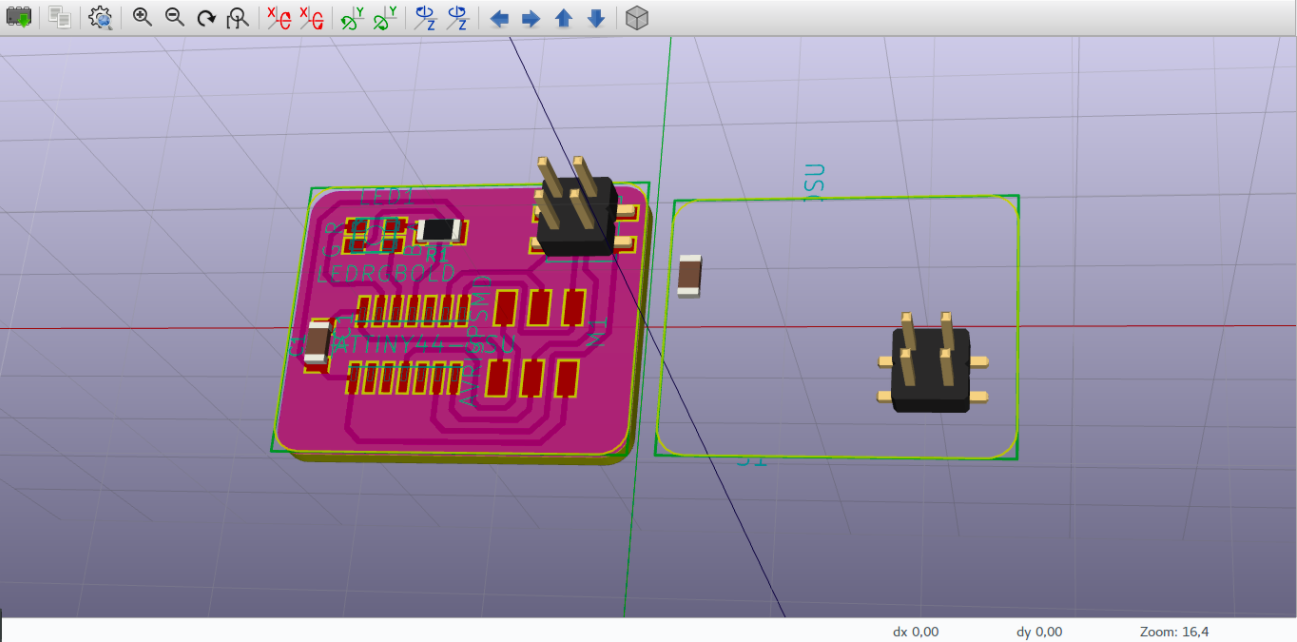
For the 3D view, it was not quit well since parts of the second board(master board) was not visible. But this part is not necessary its just for viewing the final look of the design.
After designing I converted images generated by KiCAD into png since it generates svg image:
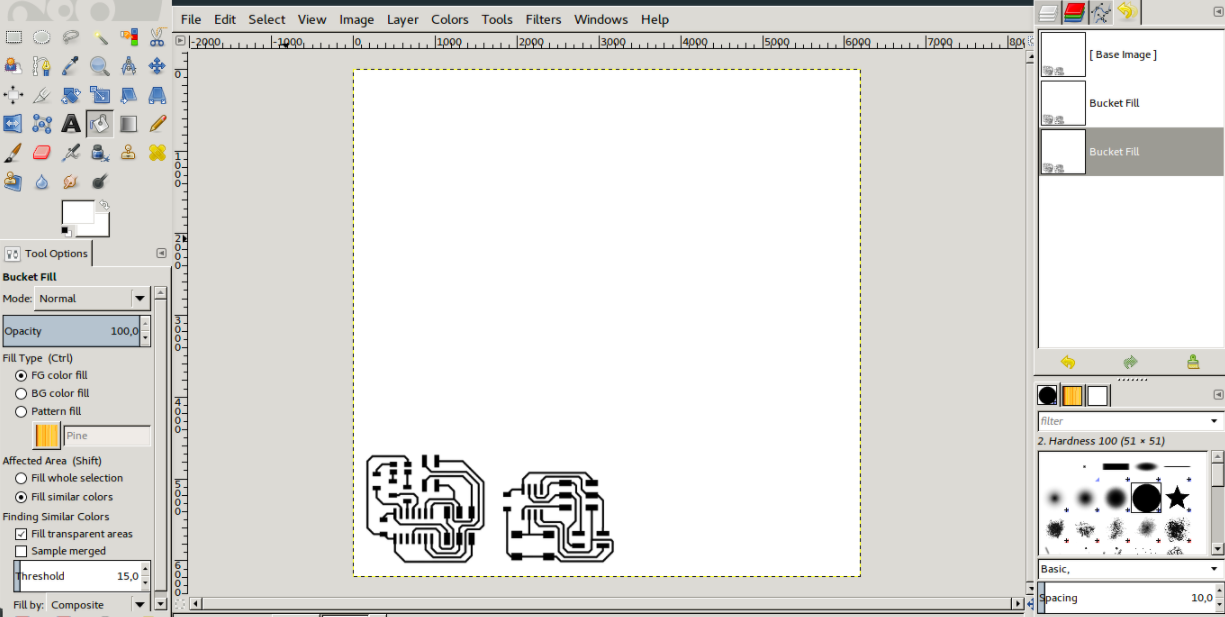
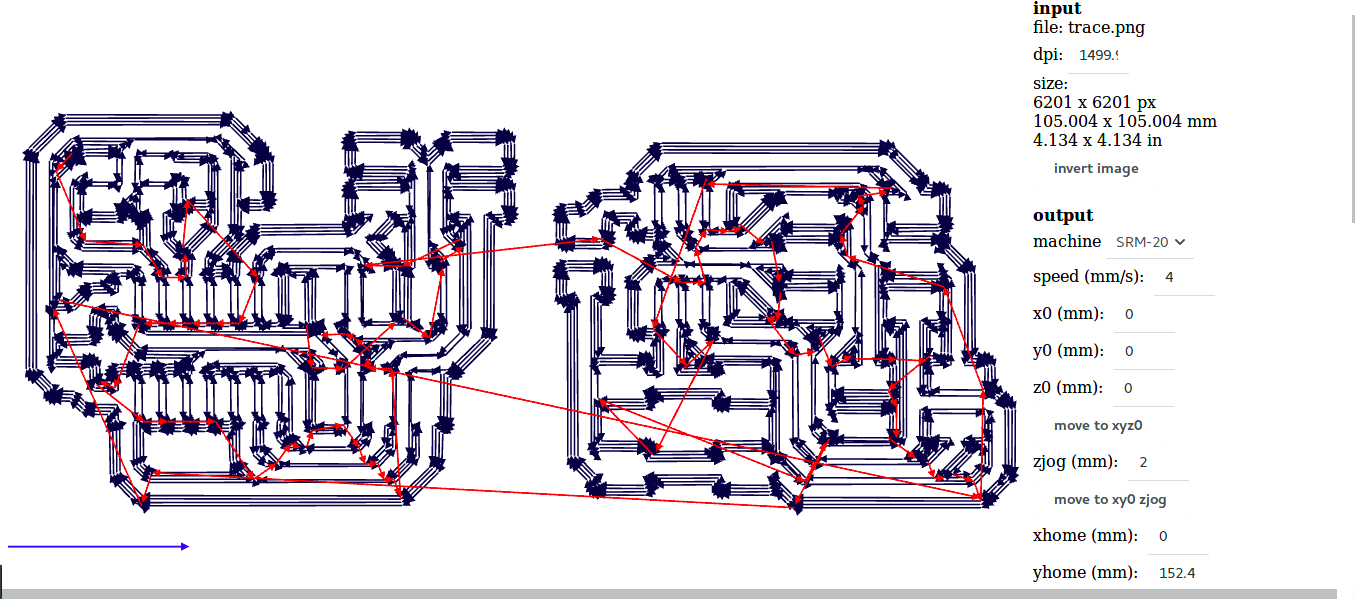
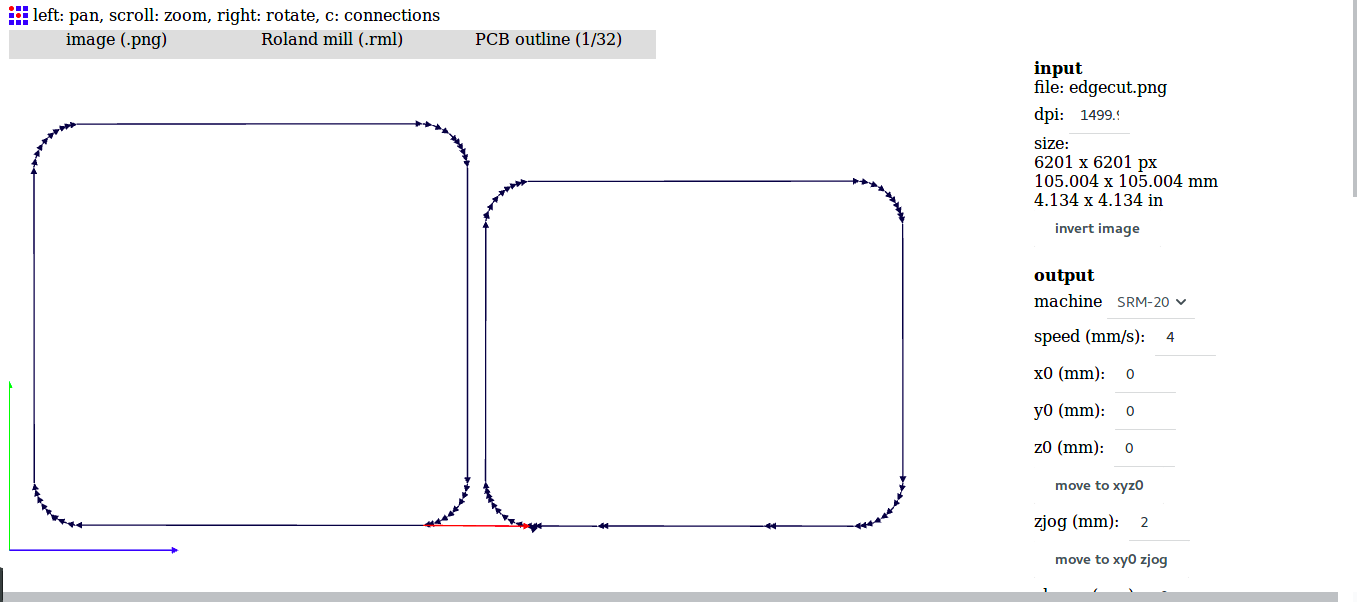
After that I used fabmodules to generated rml files to be used in the monofab PCB milling machine
This is the list of components used:
| No | Component | Piece(s) | Value |
|---|---|---|---|
| 1 | ATtiny45 | 1 | |
| 2 | Push button | 1 | |
| 3 | AVR ISP | 1 | |
| 4 | Capacitor | 1 | 1uF |
| 5 | 2x2 connector | 1 |
| No | Component | Pieces(s) | Value |
|---|---|---|---|
| 1 | ATtiny44 | 1 | |
| 2 | RGB LED | 1 | |
| 3 | AVR ISP | 1 | |
| 4 | 2x2 connector | 1 | |
| 5 | Resistor | 3 | 500R |
| 6 | Capacitor | 1 | 1uF |
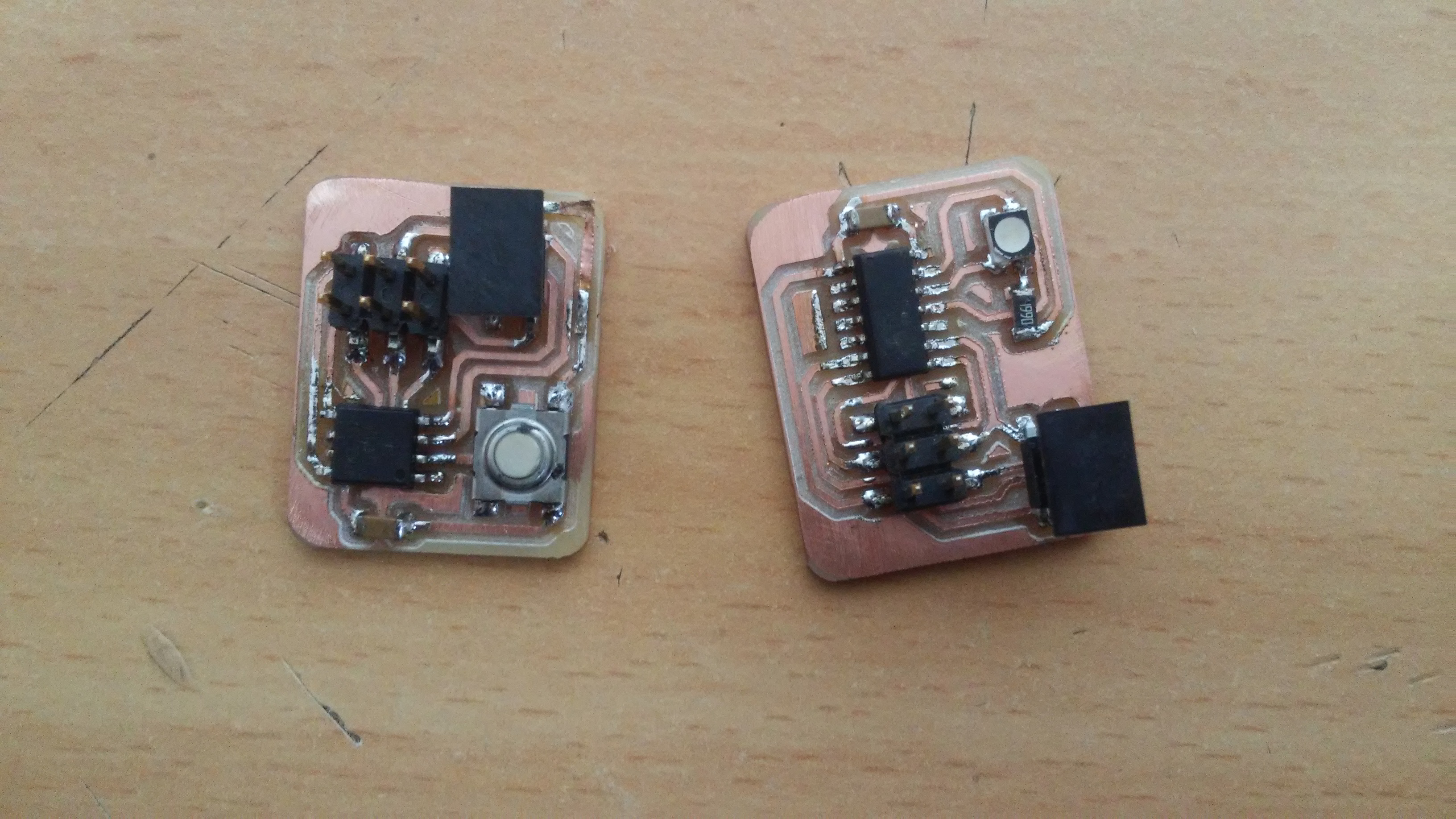
After I milled both PCBs and soldered them:
#define F_CPU 1000000UL
#include <avr/io.h>
#include <util/delay.h>
#define True 1
#define False 0
#define USI_MOSI PINB0
#define USI_MISO PINB1
#define USI_SCK PINB2
#define USI_SS PINB4
#define USI_DDR DDRB
#define USI_PORT PORTB
void USI_SPI_init(uint8_t mode){
if(1 == mode){ // Master mode
USI_DDR |= (1<<USI_MOSI)|(1<<USI_SCK)|(1<<USI_SS);
USI_PORT |= (1<<USI_SS):
USI_DDR &= ~(1<<USI_MISO);
USI_PORT |= (1<<USI_MISO):
USISR |= (1<<USIOIF);
USICR |= (1<<USIWM0)|(1<<USICS1)|(1<<CLK)|(1<<USITC);
}
else if (0 == mode){ //Slave mode
USI_DDR &= ~((1<<USI_MISO)|(1<<USI_SCK)|(1<<USI_SS));
USI_DDR |= (1<<USI_MOSI);
USI_PORT |= (1<<USI_MISO)|(1<<USI_SCK)|(1<<USI_SS);
USICR = (1<<USIWM0)|(1<<USIOIE)|(1<<USICS1);
}
else { // Signal when wrong mode is selected
DDRB |= (1<<PINB0);
PORTB |= (1<<PINB0):
}
}
void USI_SPI_transfer(uint8_t dataIn){
USI_PORT &= ~(1<<USI_SS);
USIDR = dataIn;
do{
USICR |= (1<<USIWM0)|(1<<USICS1)|(1<<USICLK)|(1<<USITC);
}while((USISR & (1<<USIOIF)) == 0);
USI_PORT |= (1<<USI_SS);
}
uint8_t USI_SPI_receiver(void){
USISR |= (1<<USIOIF);
while((USISR & (1<<USIOIF)) == 0);
return USIDR;
}
int main(){
DDRB &= ~(1<<PINB3);
PORTB |= (1<<PINB3);
USI_SPI_init(1);
uint8_t count = 0;
uint8_t colourNum = 0;
while(True){
if (bit_is_clear(PINB, 3){
count += 1;
if (colourNum > 7)
colourNum = 0;
if (count >= 400){
colourNum++;
USI_SPI_transfer(colourNum);
count = 0;
}
}
_delay_ms(50);
}
}#define F_CPU 1000000UL
#include <avr/io.h>
#include <avr/iotn44.h>
#include <util/delay.h>
#define True 1
#define False 0
#define USI_MOSI PINA6
#define USI_MISO PINA5
#define USI_SCK PINA4
#define USI_SS PINA7
#define USI_DDR DDRA
#define USI_PORT PORTA
void USI_SPI_init(uint8_t mode){
if(1 == mode){ // Master mode
USI_DDR |= (1<<USI_MOSI)|(1<<USI_SCK)|(1<<USI_SS);
USI_PORT |= (1<<USI_SS):
USI_DDR &= ~(1<<USI_MISO);
USI_PORT |= (1<<USI_MISO):
USISR |= (1<<USIOIF);
USICR |= (1<<USIWM0)|(1<<USICS1)|(1<<CLK)|(1<<USITC);
}
else if (0 == mode){ //Slave mode
USI_DDR &= ~((1<<USI_MISO)|(1<<USI_SCK)|(1<<USI_SS));
USI_DDR |= (1<<USI_MOSI);
USI_PORT |= (1<<USI_MISO)|(1<<USI_SCK)|(1<<USI_SS);
USICR = (1<<USIWM0)|(1<<USIOIE)|(1<<USICS1);
}
else { // Signal when wrong mode is selected
DDRB |= (1<<PINB0);
PORTB |= (1<<PINB0):
}
}
void USI_SPI_transfer(uint8_t dataIn){
USI_PORT &= ~(1<<USI_SS);
USIDR = dataIn;
do{
USICR |= (1<<USIWM0)|(1<<USICS1)|(1<<USICLK)|(1<<USITC);
}while((USISR & (1<<USIOIF)) == 0);
USI_PORT |= (1<<USI_SS);
}
uint8_t USI_SPI_receiver(void){
USISR |= (1<<USIOIF);
while((USISR & (1<<USIOIF)) == 0);
return USIDR;
}
void setColour(uint8_t value){
if (value == 1){ // white colour
PORTA &= ~((_BV(PINA0)|_BV(PINA1)|_BV(PINA2));
}
else if (value == 2){ //Blue
PORTA &= ~_BV(PINA0);
PORTA |= _BV(PINA1)|_BV(PINA2);
}
else if (value == 3){ // Green
PORTA &= ~_BV(PINA1):
PORTA |= _BV(PINA0)|_BV(PINA2);
}
else if (value == 4){ // Red
PORTA &= ~_BV(PINA2);
PORTA |= _BV(PINA0)|_BV(PINA1);
}
else if (value == 5){ // Yellow
PORTA &= ~(_BV(PINA1)|_BV(PINA2));
PORTA |= _BV(PINA0);
}
else if (value == 6){ // Pink
PORTA &= ~(_BV(PINA0)|_BV(PINA1));
PORTA |= _BV(PINA2);
}
else if (value == 7){ // Blue-ish
PORTA &= ~(_BV(PINA0)|_BV(PINA2));
PORTA |= _BV(PINA1);
}
_delay_ms(1000);
}
int main(){
DDRA |= (1<<PINA0)|(1<<PINA1)|(1<<PINA2);
PORTA |= (1<<PINA0)|(1<<PINA1)|(1<<PINA2);
USI_SPI_init(0);
uint8_t dataInt = 0;
while(True){
dataIn = USI_SPI_receiver():
setColour(dataIn);
dataIn = 0;
}
} Test:
Files:
Download