State of the art¶
Here, I will put some other projects or products that are link to my project or that have been developed for nearly the same uses.
I will also described our solution we use since 2014 and why it has to be improved. And also, other solutions from Eurobot team.
Our solutions since 2014¶
Our solution since 2014 to detect the other robot on the table is to use two sensors and rotate them from 0° to 120° with a servomotor.
| _ | _ | _ |
|---|---|---|
 |
 |
 |
 |
 |
 |
It works great to just detect a robot, but We haven’t the distance or the angle of the other robot, and the rotation was very low.
Existing projects - OpenSource¶
Comparator¶
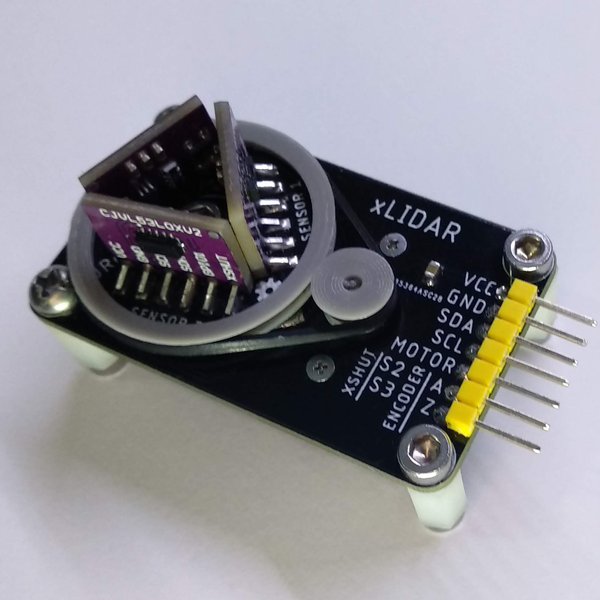
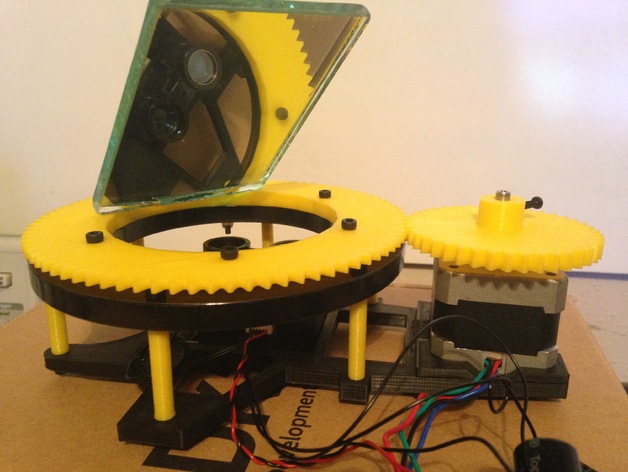
| Simple LiDAR | xLidar | LIDAR Lite | GRAULIDAR | |
|---|---|---|---|---|
| Pictures | 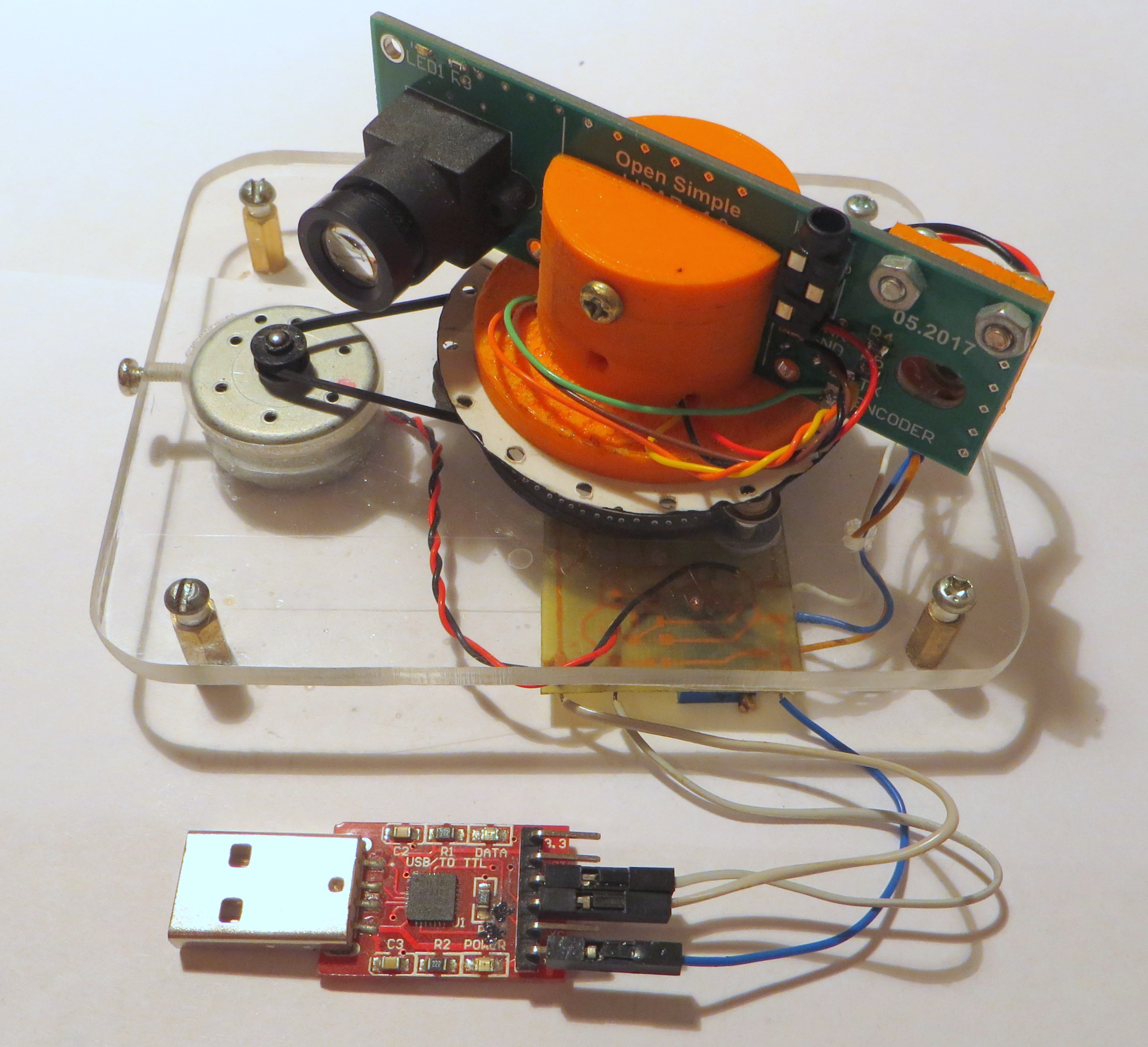 |
 |
 |
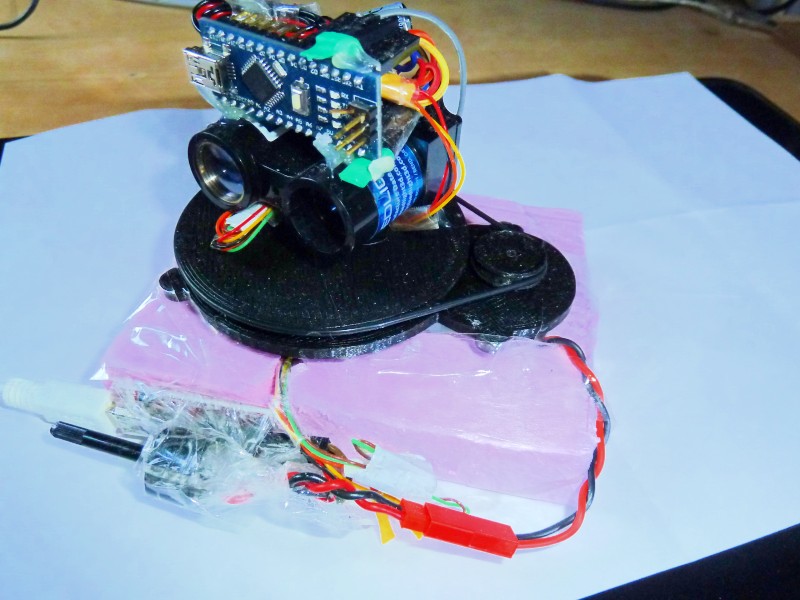 |
| Link | Opensimple liDAR | xLidar | LIDAR-Lite Scanner | GRAULIDAR |
| Price | 35$ | 20€-50€ | 150€ | 150€ |
| Embedded Data processing | No | No | No | Yes |
| Communication | USB | I2C | I2C | Serial |
| Difficulty to build/use |  |
|
|
|
| Efficiency | 5cm at 2m | not working | not working | 1cm … |