Our group decided to make a robotic arm. Documentation on all of the work can be found at the group assignment page.
The other half of my contribution can be found at the Machine Design exercise.
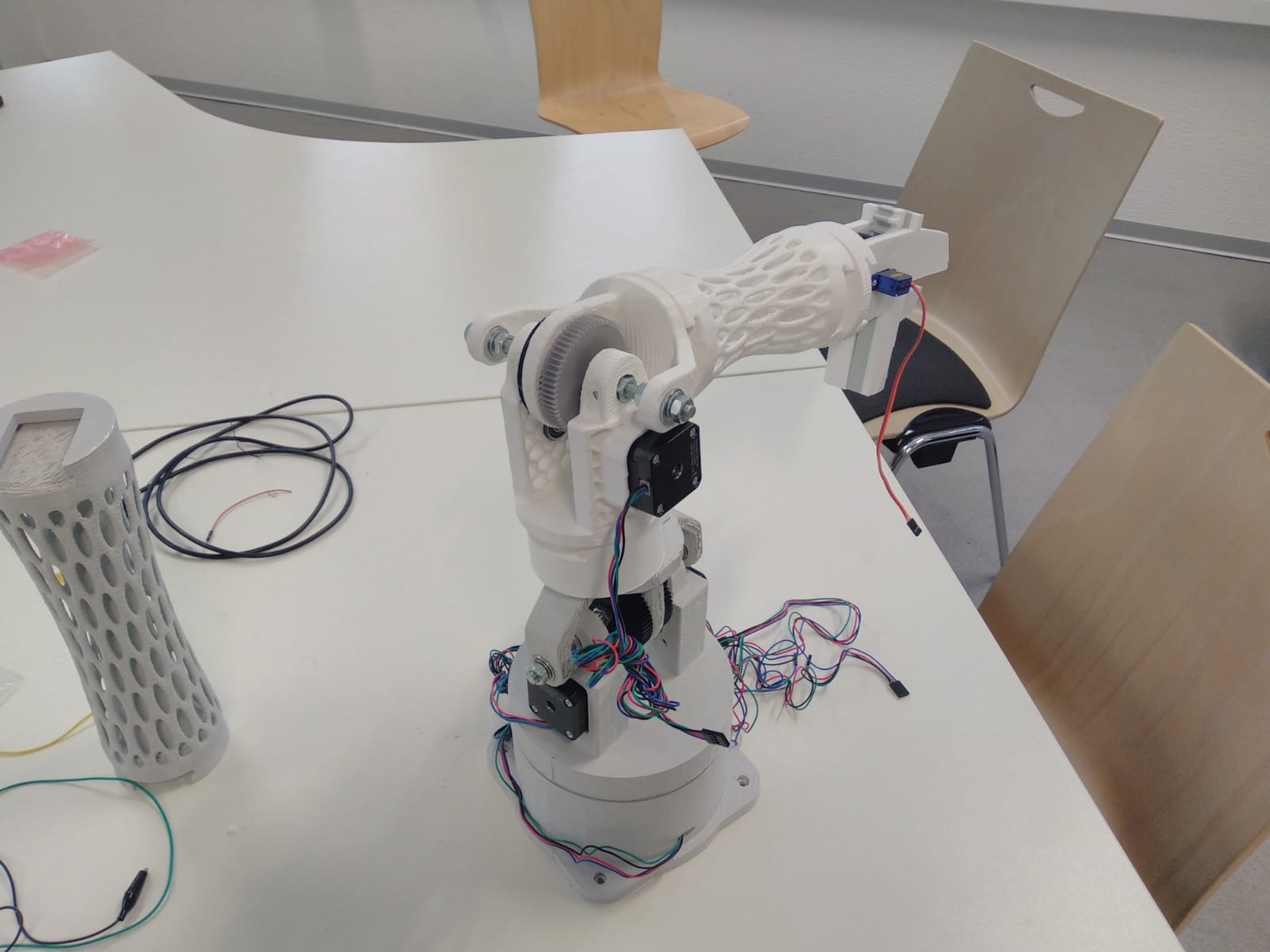
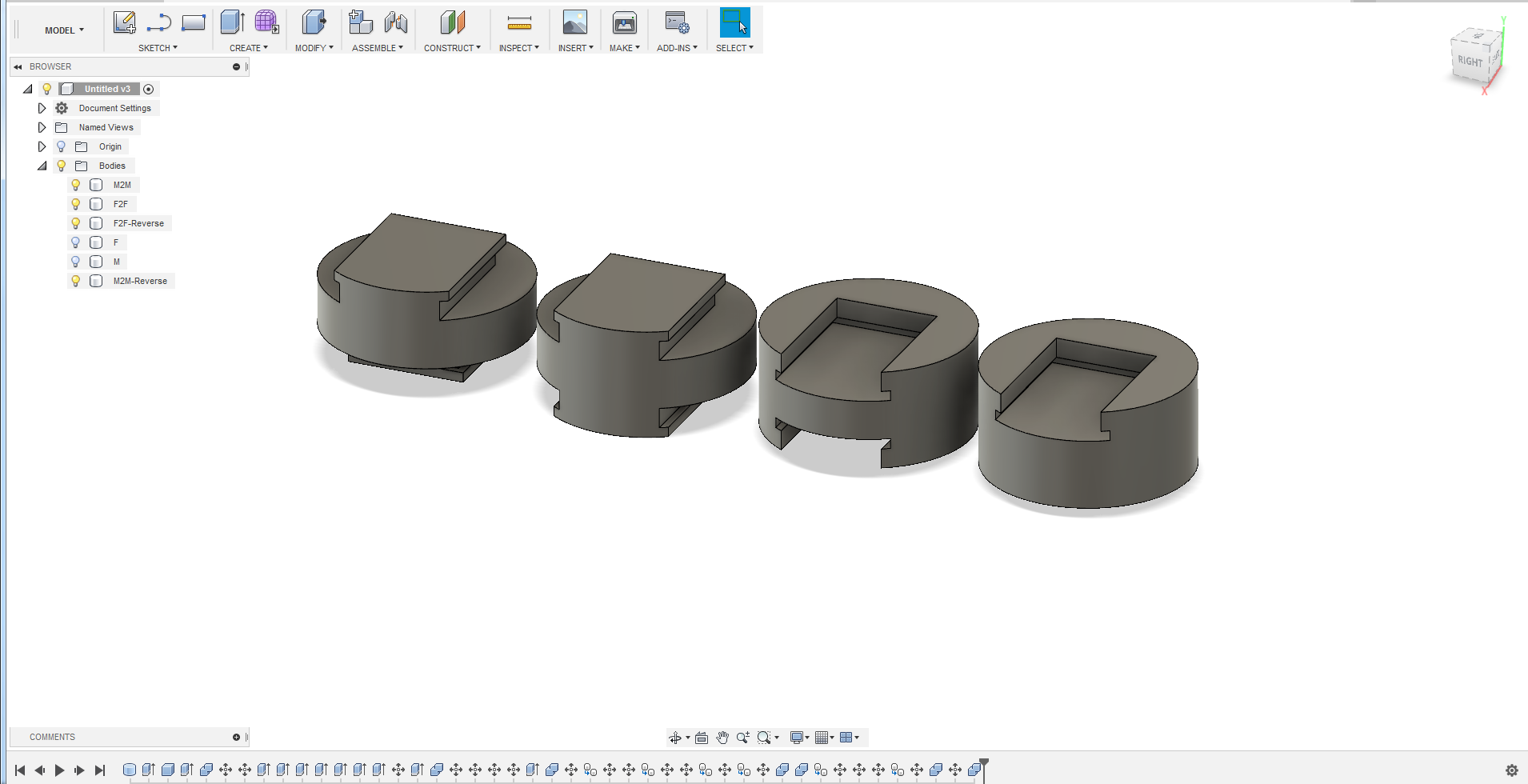
At some point it turned out that parts of the arm where way too heavy, which stopped the arm from moving. Because of this my task was to create a variety of adapters that allow to exchange each connection-element of the arm for a much smaller version or even combine multiple adapters to get a connector of the desired length. All adapters have a length of 4cm and are of the same diameter as the base elements of the original connectors.
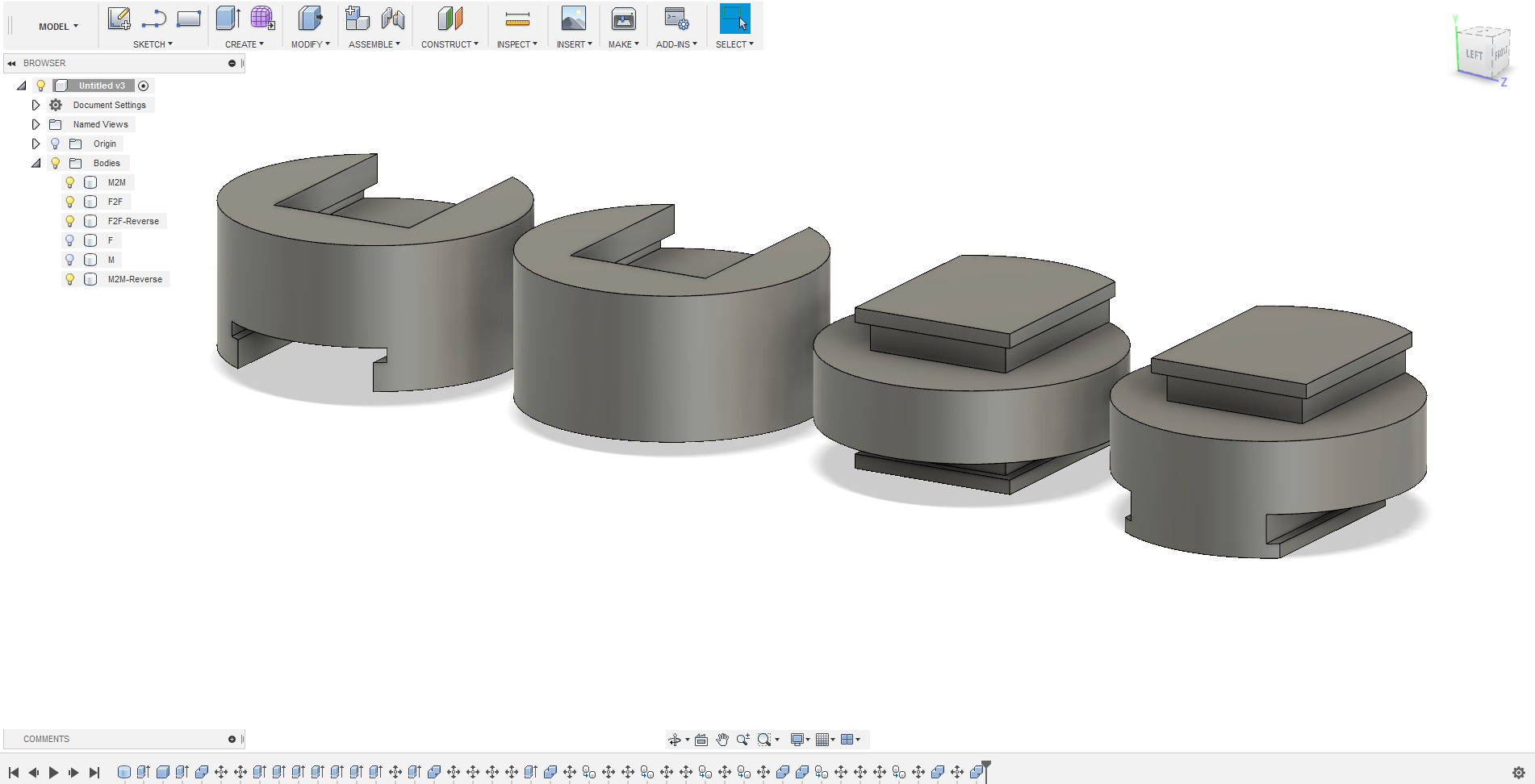
To see if all my assumptions about the design where generally correct I first configured a rather quick "proof-of-concept" print with a very low infill density, a large nozzle-size and high printing speed. This print was made to check all the dimensions, not for structural integrity. With these settings the resulting part was still surprisingly good.
Cleaning up the support structures was pretty hard, for the next print I would certainly refine the settings for the support structures. Some parts where so hard to reach and so hard to remove that I had to use a dremel.

I assembled everything and had a very tight fit, comparable to the one of the original component. I had to use a soft hammer to get the parts somewhat connected, but because I opted for a quick and less structurally sound print I wanted to avoid using a lot of force. For this reason the adapter is not connected completely, but it shows that everything is working and most importantly has a tight fit.