-
Assignment
Applications and ImplicationsApplications and Implications
In this week assignment, I had to answer couple of questions to create a full vision final project
What will it do?
It’s basically a storage robot, that can follow the specific lines to reach different boxes in the storage through different paths. The robot can identify the paths for each tools which is inside the box and sort the number of boxes at the storage to check the shipment before leaving the storage and just after arriving the storage to make inventory
Who's done what beforehand?
The idea was inspired from Amazon warehouse robots that minimize the work at the storage and increase the productivity and quality of work. The robots there are connected to each other to make sure that the work is done in parallel and decrease the time. This make the warehouse system organized and the the robots are ready and updated every single time as the robots are connected to the software directly
I work for a company that run more than 100 labs distributed over the cities in Saudi arabia. These labs need tools/machines/consumables to be transported continuously (at least once a month speaking about consumables). It’s difficult to control the shipments as the purchasing department try to load the right boxes (include the right tools/consumables) everytime by following the list that provided by the project manager based on the lab’s needs. The list should be prepared an hour before the shipment company (trucks) arrived the warehouse. The robot takes the list through simple control panel (LCD screen and buttons)
Link1 Link2What will you design?
I’m planning to design a system that can organize the work and check the shipments before leaving the trucks to the labs. This is simply a robot that track the lines to reach different boxes and pick them to collect them at the loading stage. The robot can take the requirements through control panel to achieve the lab’s needs. So, in general I will need to design a robot chassis and to design a microcontroller board that takes all the components to be connected and programmed to do the right function. I will be using all most of the technique that we took during the fab academy course
What materials and components will be used?
This can be categorized into the following:
** In 2D fabrication:
- 3mm Acrylic
- Chloroform acrylic glue
- 3mm/6mm wood
- Wood glue
- Screws
- Sanding papers
- Screwdrivers/drills
** In 3D fabrication:
- 1.75mm PLA filament
- Spatula (3D removal tool)
- Molding material (silicone rubber)
- Casting material (casting resin)
- Molding wax
- Mold release spray
** In Electronics design and implementations:
- Copper PCB board
- Soldering tools
- AtMega328p microcontroller chip
- Resistors
- Capacitors
- Header pins
- Jumpers wires
- LCD 16*2
- Push buttons
- Line tracker module
- DC motors
- Power MOSFETs (IRF520)
- Diode 1N4007
- Servo motors
- For identifying the boxes, I may use:
Color sensor or Simple camera to read the barcode/QR code or RFID technology
Where will come from?
This was based on the material and components that I’ve been trying to test and do since the first day of the Academy as I was planning to make the same project. But the idea was modified reference to some research that I did. I tried to include most of the techniques that we have been learned during the course
How much will they cost?
MOLDING MATERIAL (SILICONE RUBBER)
CASTING MATERIAL (CASTING RESIN)
ATMEGA328P MICROCONTROLLER CHIP
What parts and systems will be made?
Robot chassis
Microcontroller board
Motor driver
Picking and placing mechanism
What processes will be used?
Additive fabrication: as I’m going to use FDM (fused deposition modeling) 3D printer to print some parts of robot chassis and picking mechanism
Testing the project using Arduino: Connect an initial circuit to test the whole functionality before doing and connecting my own board
Subtractive fabrication: using the Vinyl and laser cutter to customize parts in addition to using milling machine to create the microcontroller board in terms of milling traces and drilling
Soldering the components: collecting the components needed and starting the soldering process
Testing the circuit: making sure that the traces are connected perfectly to the same line to transfer the signals
Connecting the sensors and motors: Test the microcontroller board functionality and sensors and motors working
Finishing process: including assembly and putting everything together with final touches
Final test: running all the functionality after finishing process
Project Plan:
I used Microsoft project to develop a simple schedule that contains all the milestones and tasks to get the project done. After creating new project I set Friday only as non working day, then I started initiating the tasks
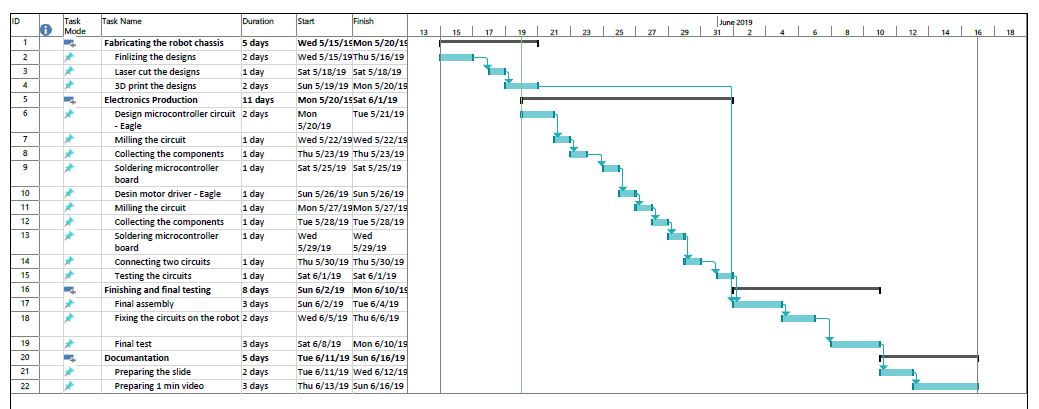
By adding the start date and how many days I need to finish the task, the schedule was done as shown in the following figure
I linked the tasks that depend on each others. And the final form of the project plan that I did including Gantt chart
You can download the pdf and mpp versions from the following links
mpp version pdf version