-
Assignment
Principles & PracticesPrinciples & Practices
This is the first assignment of our excited journey, FABLAB... I can't define it by set of words, all I can say it's an amazing environment to learn, make, and share with local and global network. I'm so thankful that I'm a student in Fab Academy this year 2019

I'll start explaining my final project. First of all, I work for a company that makes many learning programs in different cities, some of them near to our storage and main office, but the other and usually far away from the storage. So, we make lots of shipments sometimes every day, sometimes every week..etc. This is an example of shipping Micro bit with accessories 1000 pcs.

The problem is, some boxes are not shipped by mistake or some extra boxes are shipped by mistake as well. it's very difficult to return the shipment or ship what they need exactly once again, because of the cost and manpower. So, we need something to make sure how many boxes do we need to ship and for which location or which shipment? The good thing that we used to have labels on the boxes as color coded that allows anyone to know what inside the box and to make the shipping easier how many boxes should we shift from the specific item in each shipment?
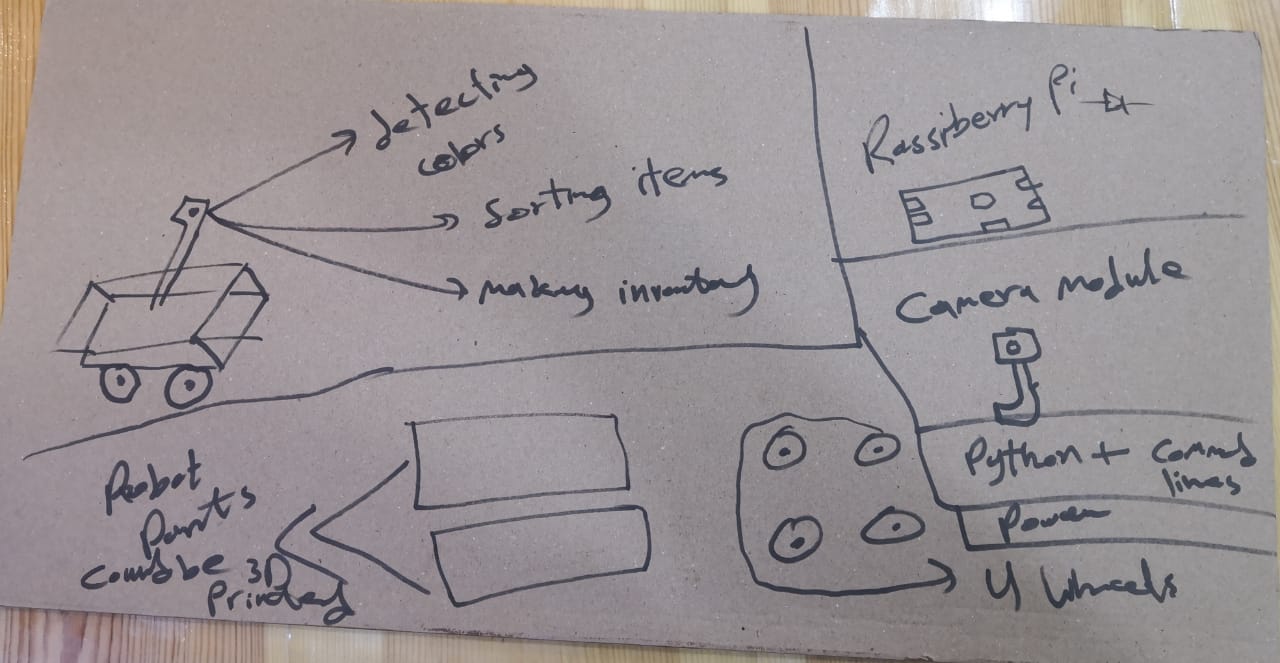
Trying to make a simple robot that can save the number of boxes in the storage and the number of boxes needed in each shipment from each color
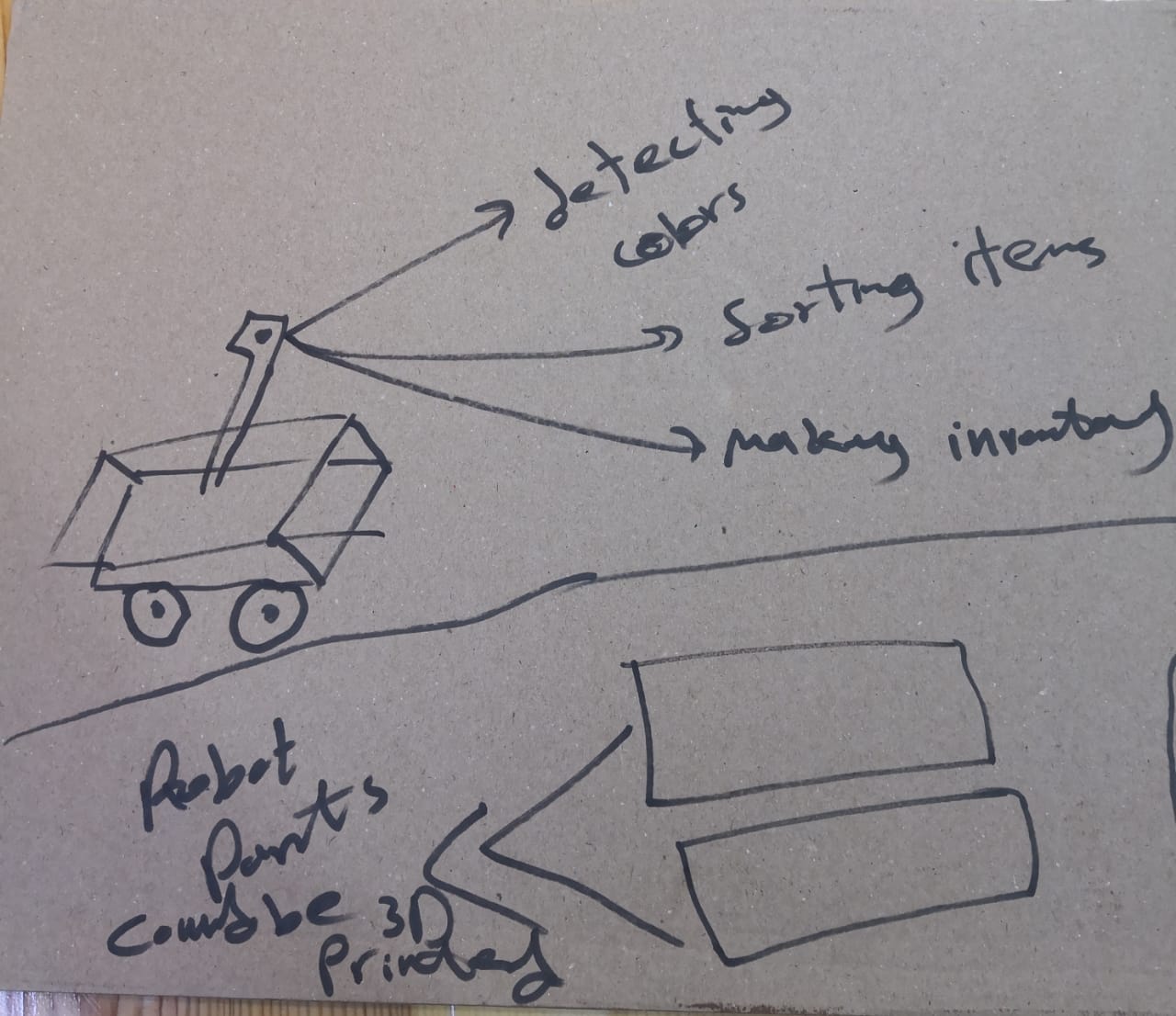
The robot tasks are:
- Sorting the colors
- Following the path
- Making inventory (how many boxes shipped and how namy remining?
- Checking the shipment before leaving
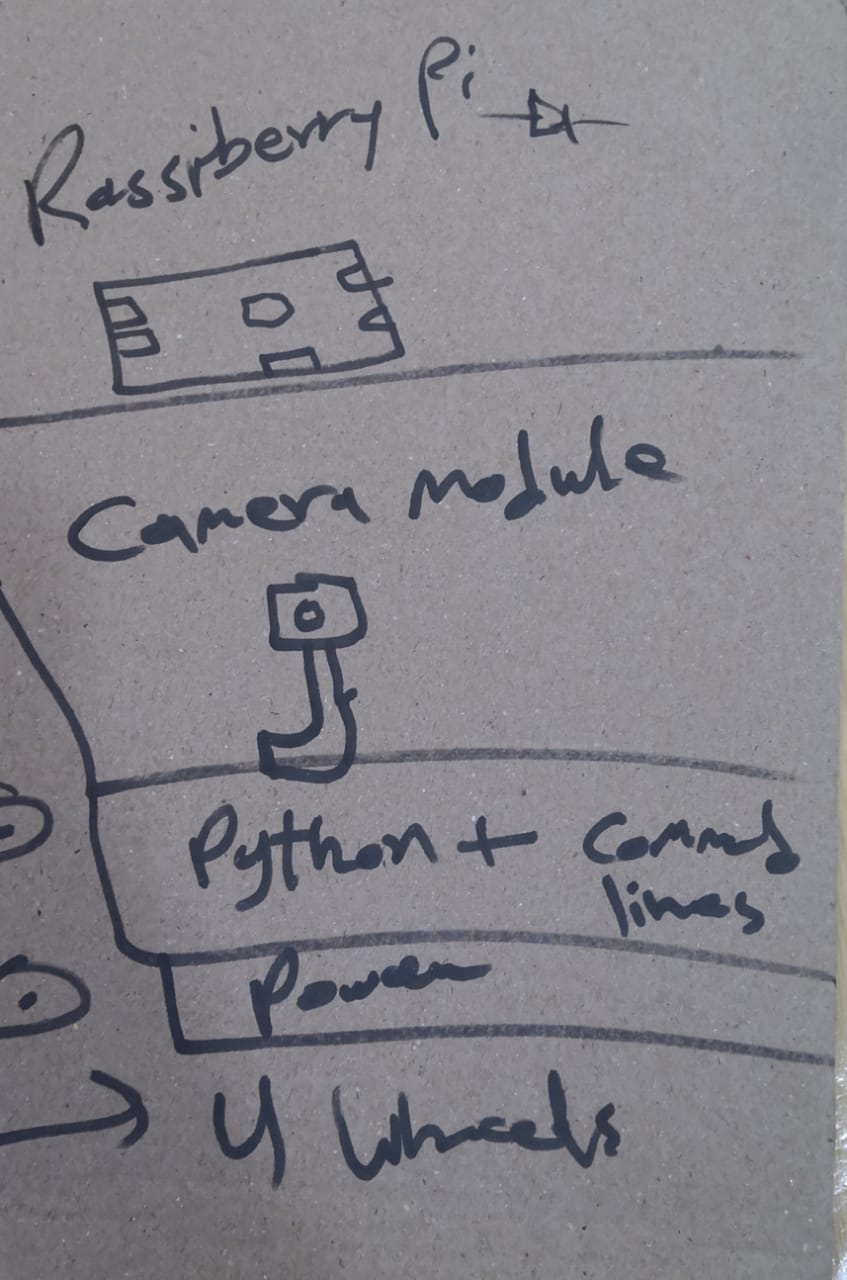
I'm planing to use the following items:
- Microcontroller (Arduino or raspberry Pi)
- Camera or color sensor
- Motor driver
- DC motors
- tracking sensors
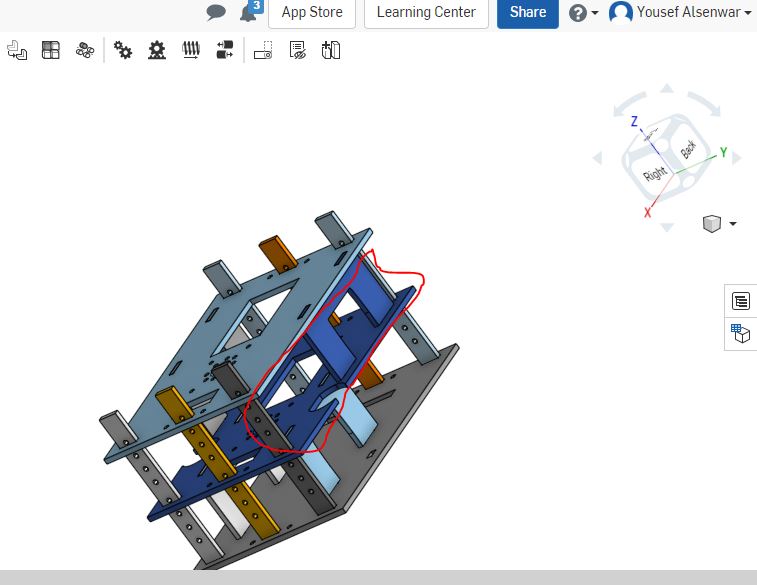
After testing some features using different tools... I started designing the robot by using Onshape as a first illistration
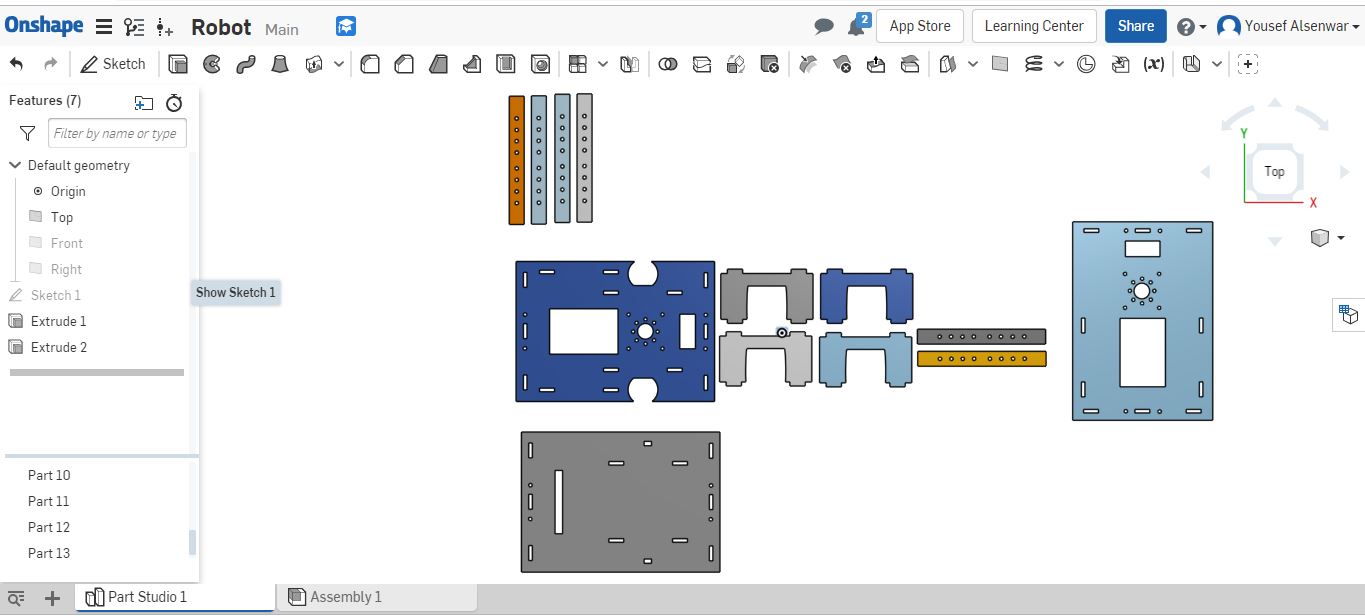
The above figure describing the parts that I will start to collect and assemble to get the robot chassee. I used the second icon for assembling the robot parts. I used fastned tool to do the fixing after imprting the parts one by one

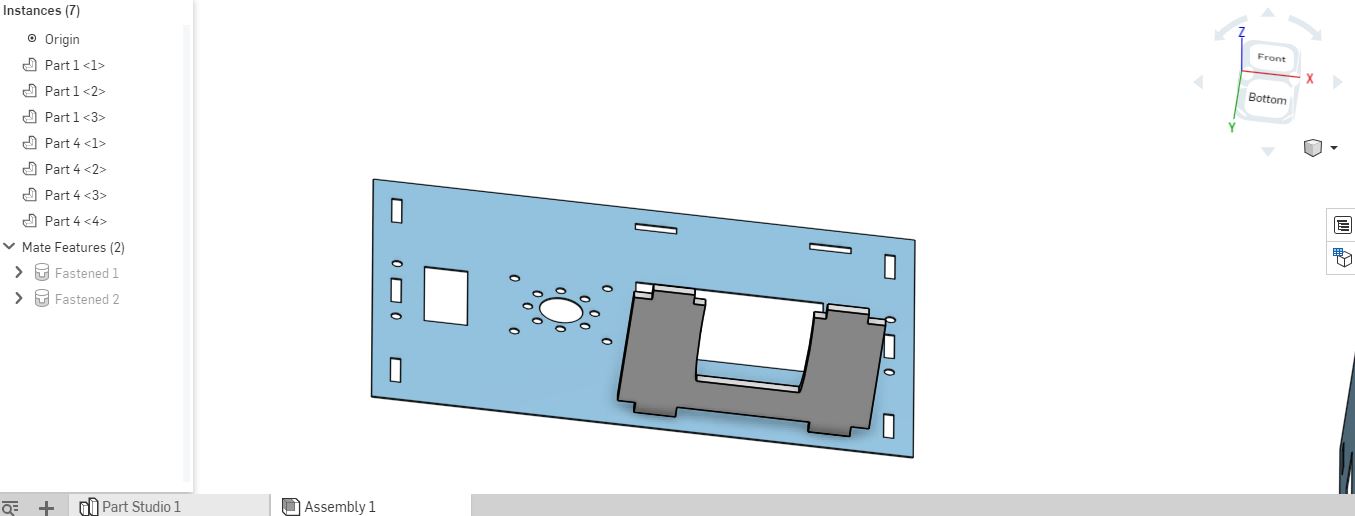
Then I get it as final. It looks amazing!! :)

So basically I'm going to use the second level in the robot chassis to collect the microcontroller and electronics parts. Trying to organize the robot and keep electronics components