Week 15 assignments:
Machine design
From Fab Academy 2018 assignments
1. Plan and make a machine. Document the group project and your individual contribution..
Have:
Explained your individual contribution to this project on your own website (individual assignment)
On the group page (linked on your Lab page), has your group:
Work and communicate effectively in a team and independently.
Design, plan and build a system
Analyse and solve technical problems
Recognise opportunities for improvements in the design
Explained your individual contribution to this project on your own website (individual assignment)
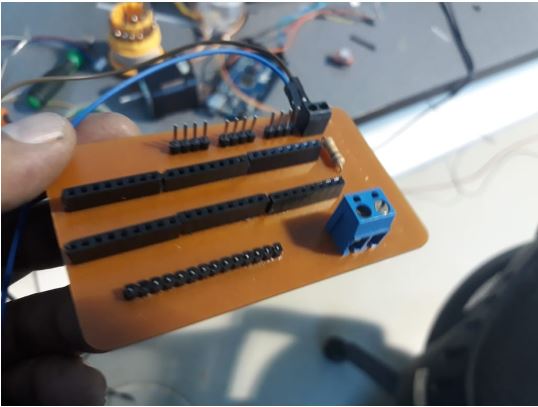
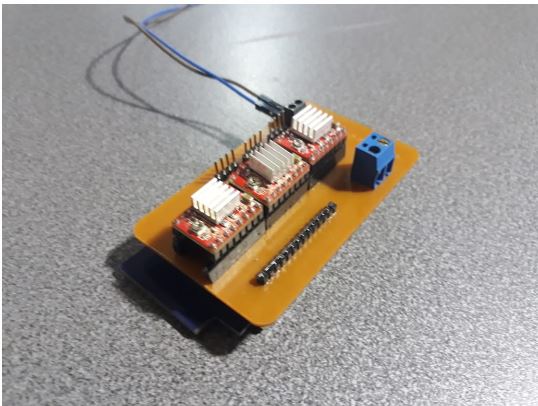
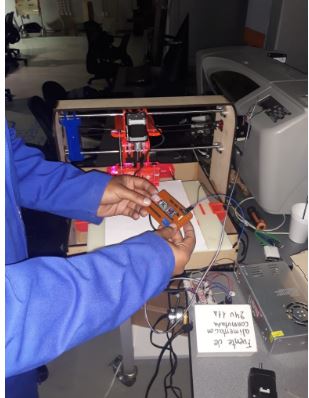
My main contribution in the development of the machine was that of electronic production and programming. Below I describe the steps for assembly of circuit control:
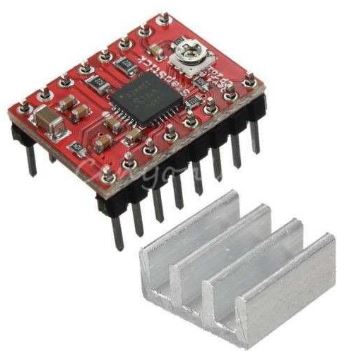
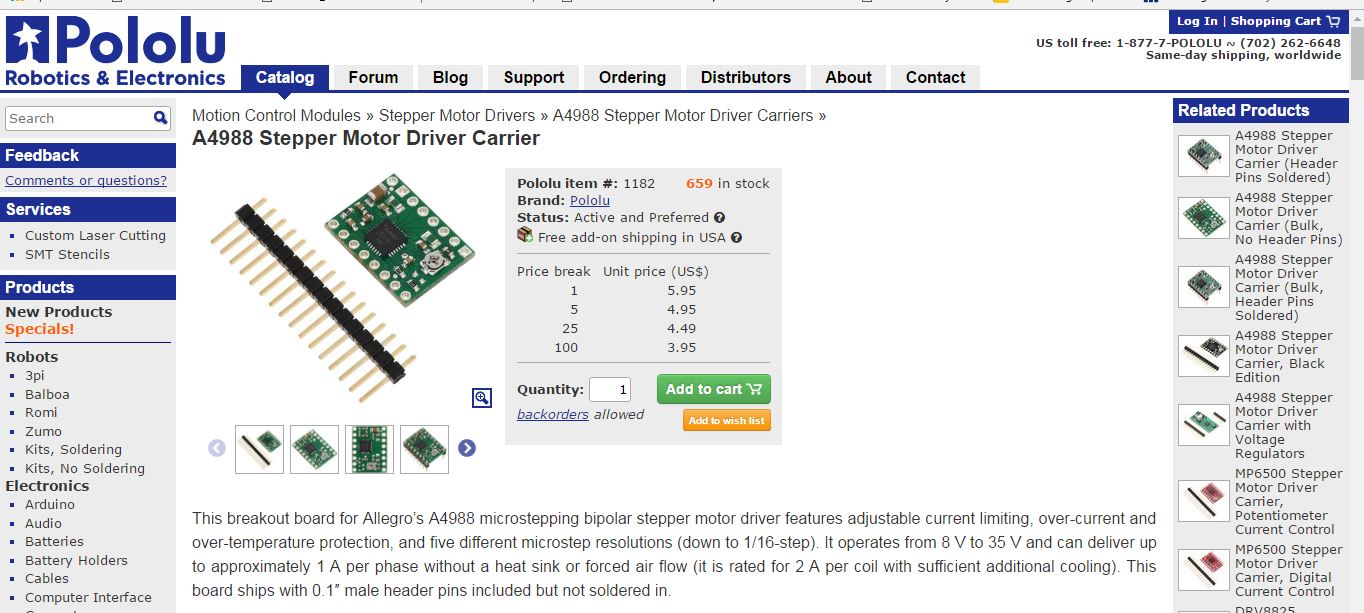
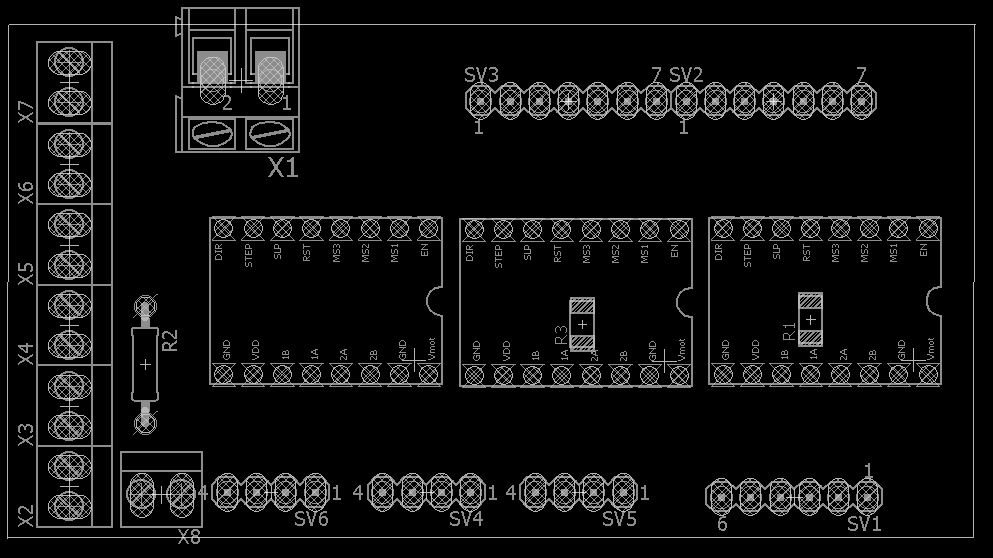
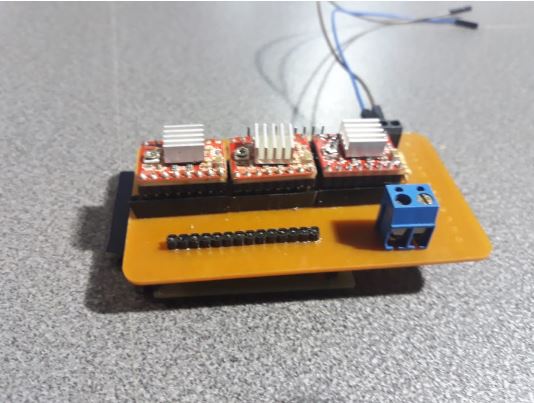
For the circuit I used A4988 that is a bipolar stepper driver circuit that allows you to drive a bipolar stepping motor up to 2A of current from any microcontroller. This driver for stepper motors has a current limiter, and protection from overheating and over consumption to ensure proper operation when you use it in your projects. The driver operates in a range of 8 to 35V with a current of 1A per phase (without a heat sink) and has the capacity to support up to 2A per coil if there is sufficient additional cooling.
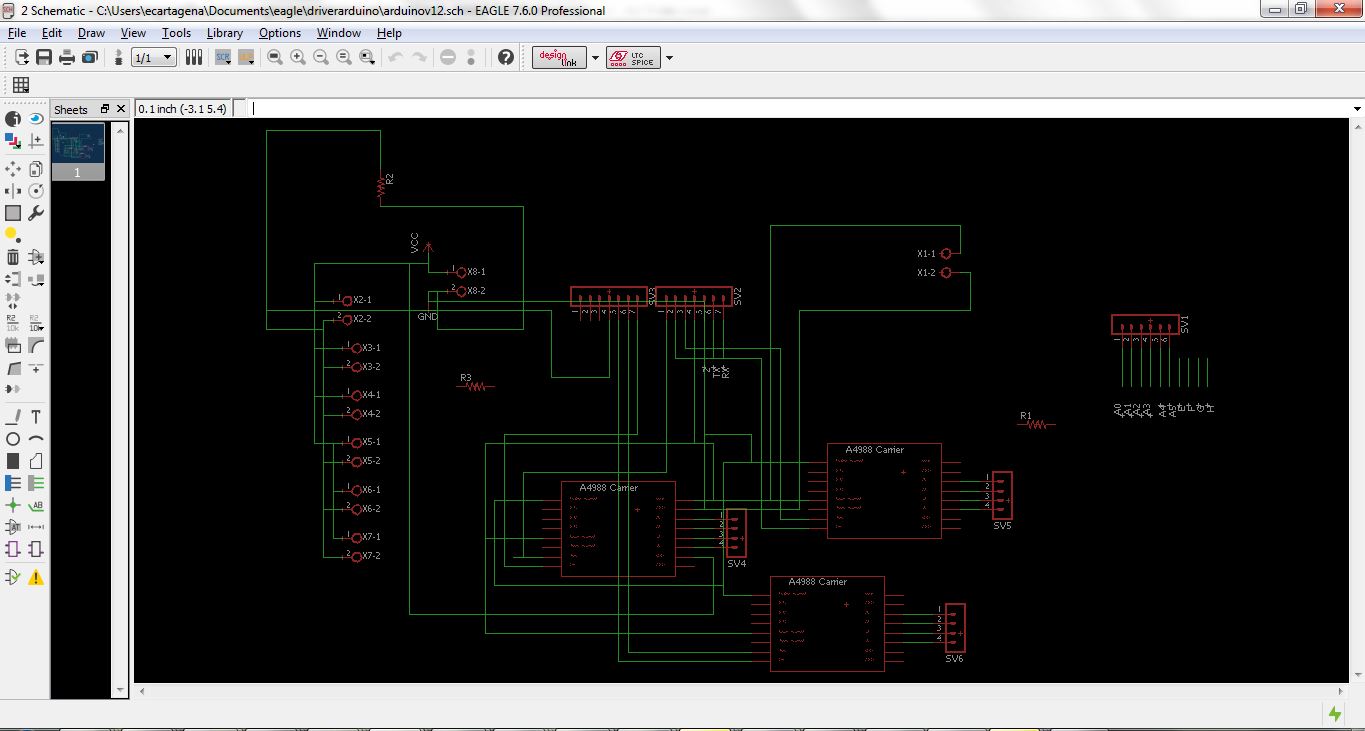
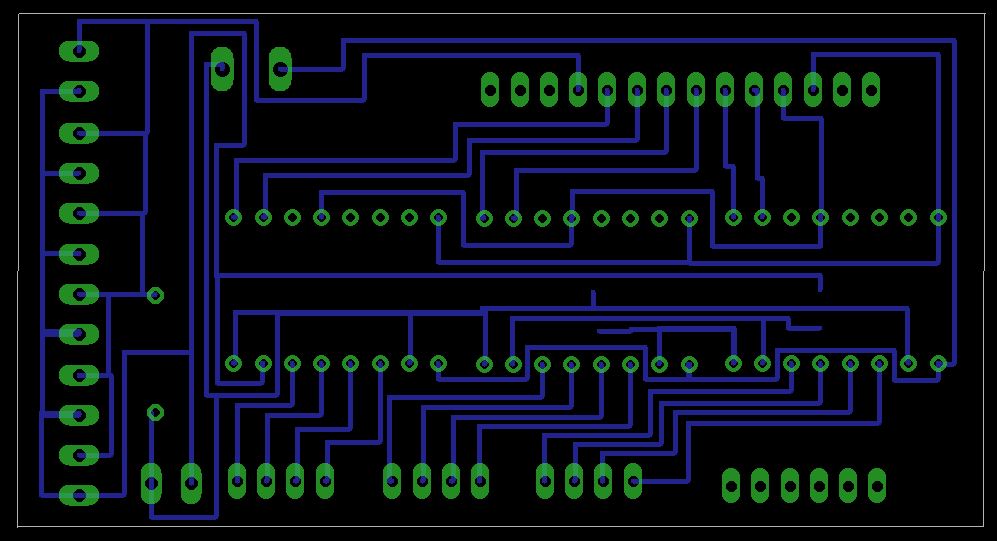
Design in Eagle Software
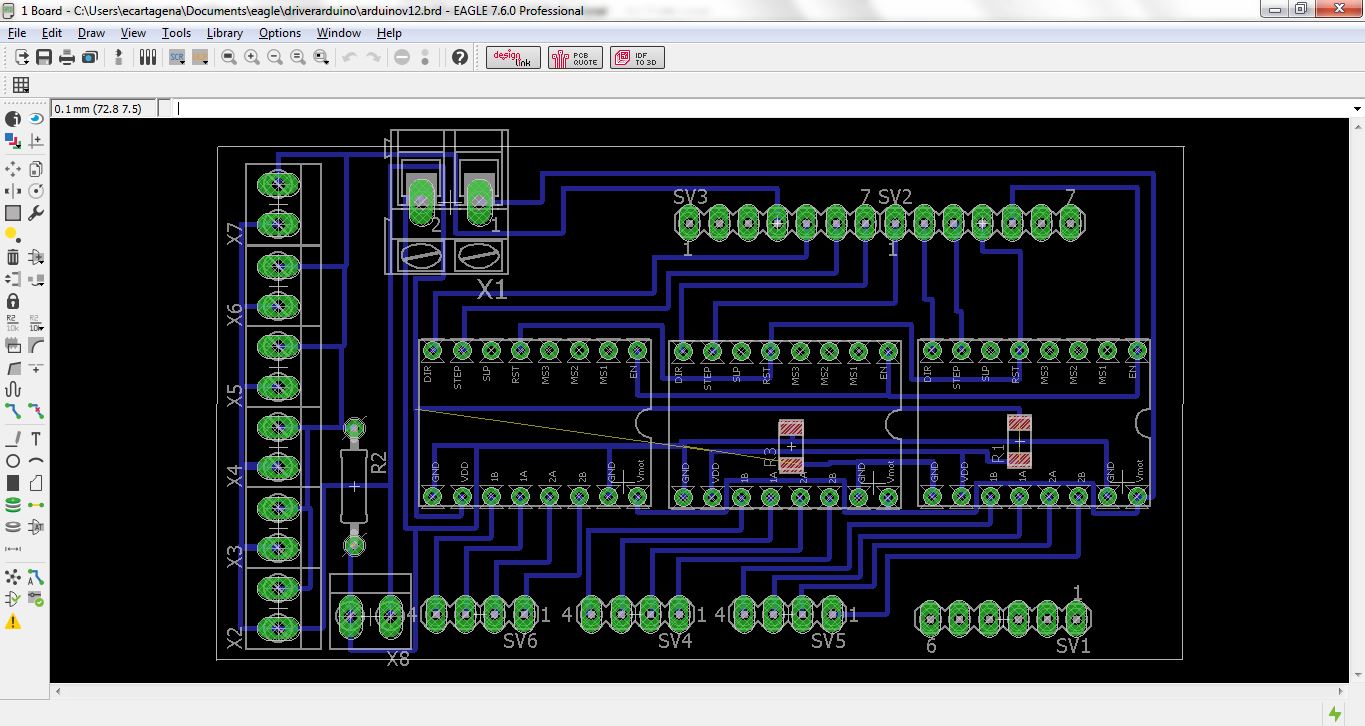
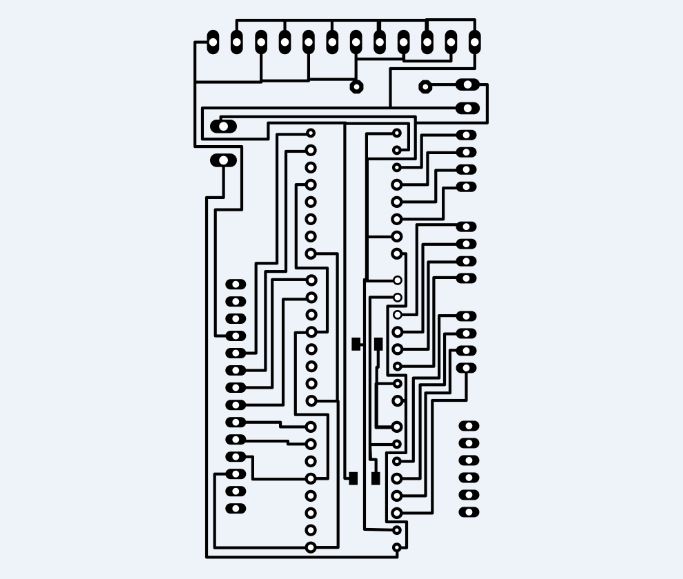
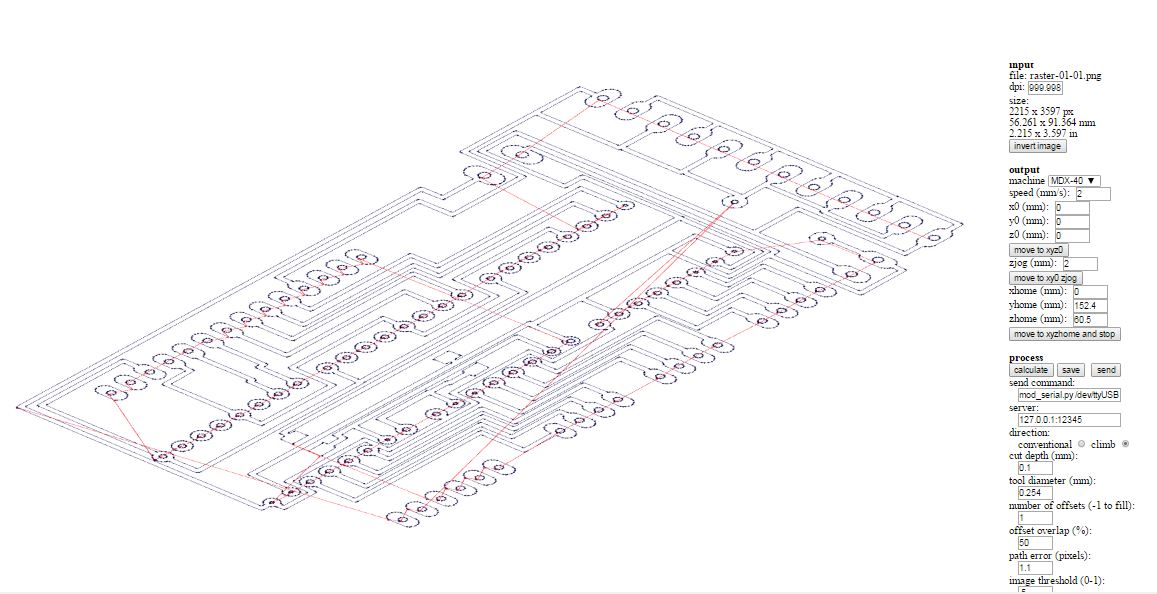
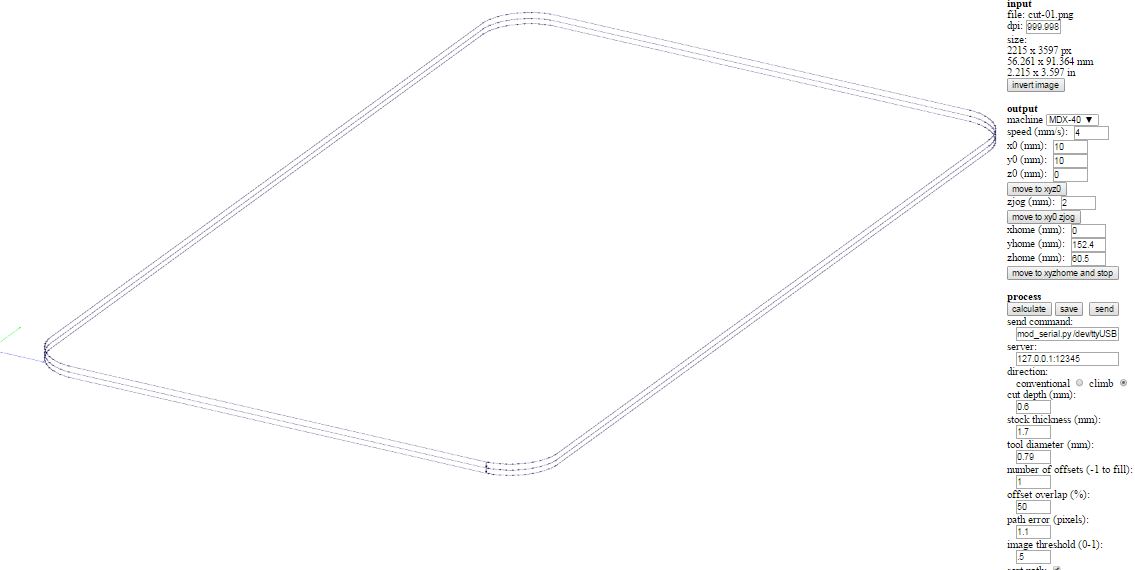
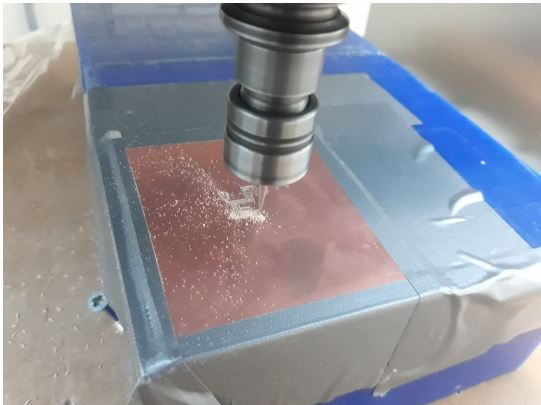
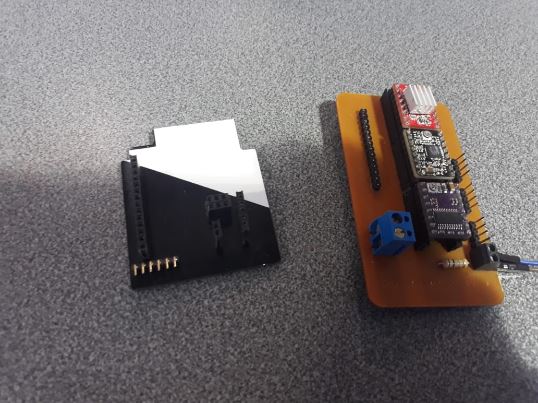
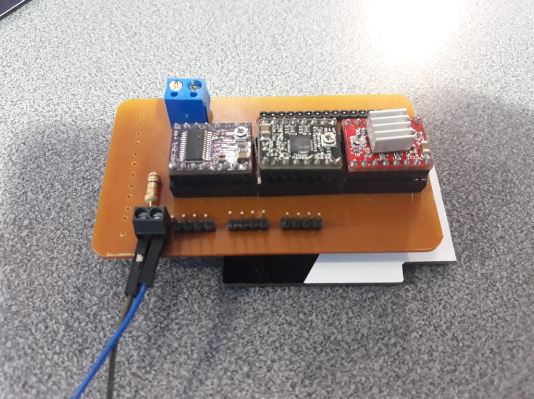
Manufacturing and assembly


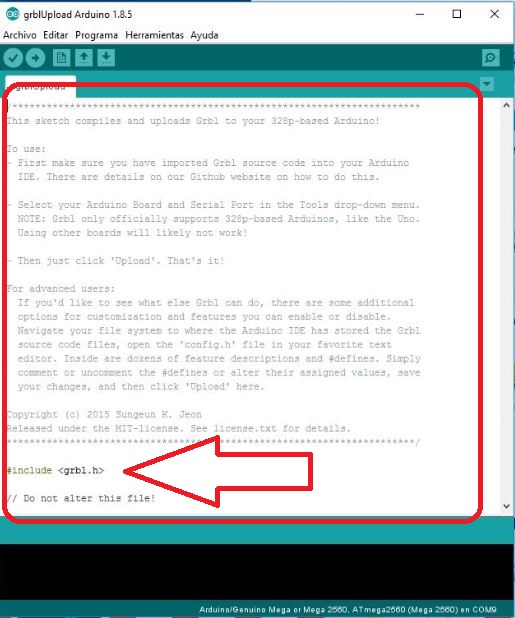
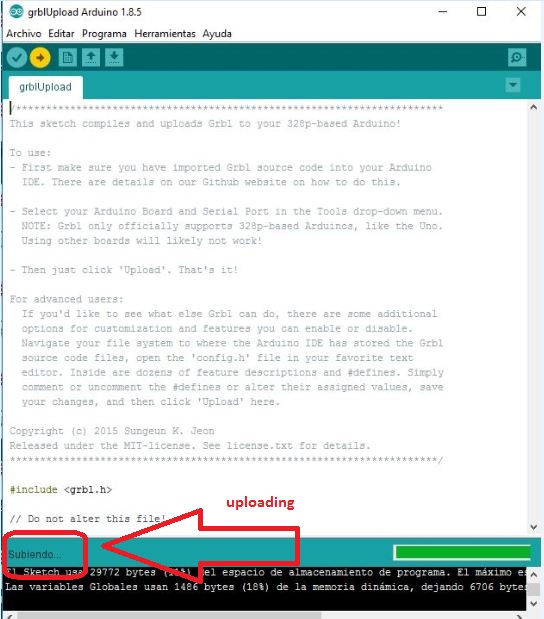
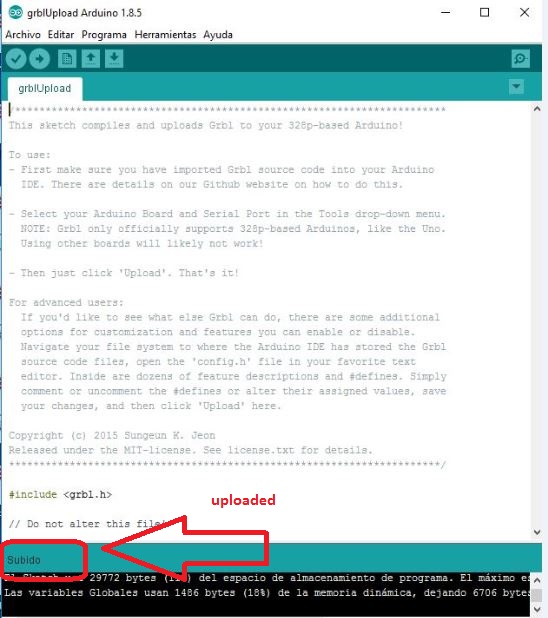
Programming
The programming used was GRBL , which we loaded from the Arduino IDE
Grbl is a free, open source, high performance software for controlling the motion of machines that move, that make things, or that make things move, and will run on a straight Arduino. If the maker movement was an industry, Grbl would be the industry standard.
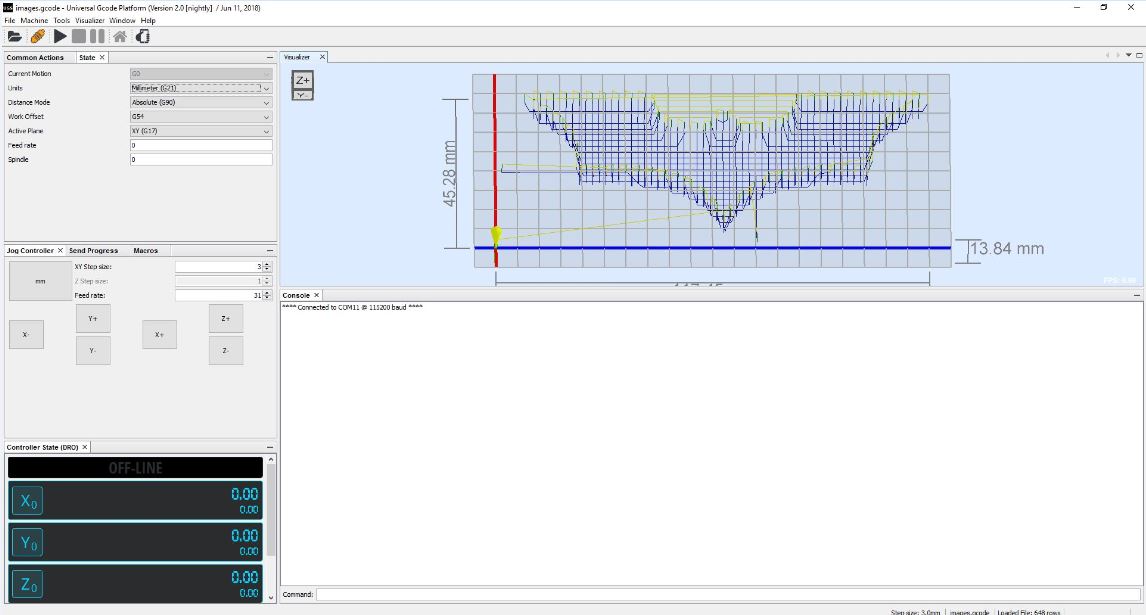
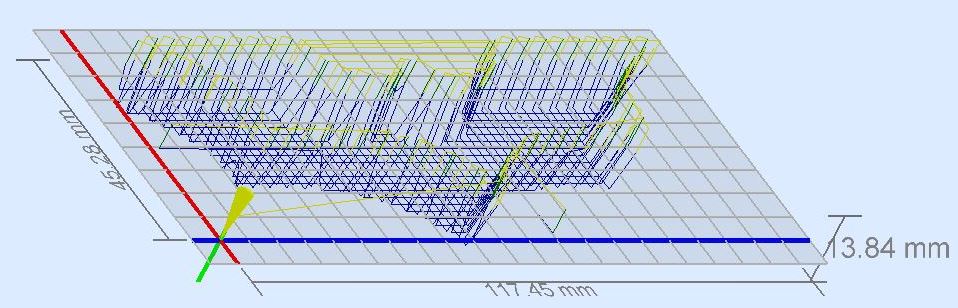
Control with graphic interface
For upload the G-CODE we used UGSPLATAFORM
The UGS Platform is the next generation of Universal Gcode Sender. It is built ontop of the Netbeans Platform which allows us to leverage its mature modular framework. This platform allows more features to be added without compromising on code quality, or being bogged down by a home grown framework. The Classic GUI is used as a library, so core features benefit both interfaces
Contribution

