| Arefin |
Komal |
Ugyen |
Kamlesh |
|---|---|---|---|
| Interfacing Guy | Hands on and machining | End Effector Works | Team Lead, Management |
| Rutvij |
Sanket |
Chaitanya |
Rohan |
| Electronics Guy | Documentation and machining guy | Structure Works | Calculus and design |
The Zero is a robotic arm having 4 degrees of freedom, designed to be mounted on any surface and to work with various end effectors, through a modular design.
The arm currently is designed for the accute purpose of engraving over flat surfaces.
The structure of the arm has been insprired out of the MeArm and other high end robotic arm, to find a mid way solution that could solve our purpose the easy way.
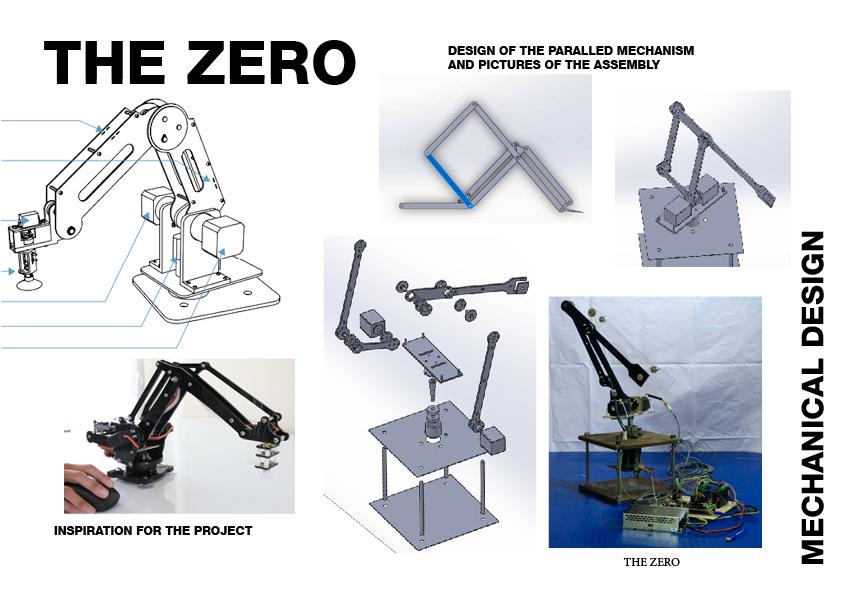

The Arm supports a very vesatile design where there could be a range of end effectors that could be attached.
Secondly there is a scope of adding a motor at the end to addup to a degree of freedom.
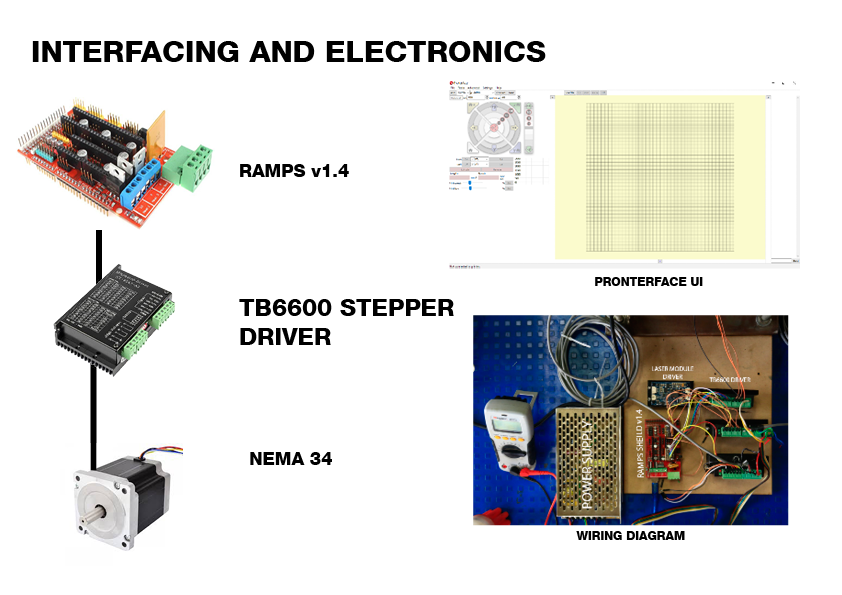
Possible improvement for interfacing using robo language, interfaced with superior hardware and softwares such as RoboDk
And many more possibilities flow along with the creativity....