
Packing machine by Eidha Alrashdi is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Based on a work at http://fab.academany.org/2018/labs/fablabuae/students/eidha-alrashdi/final.html.
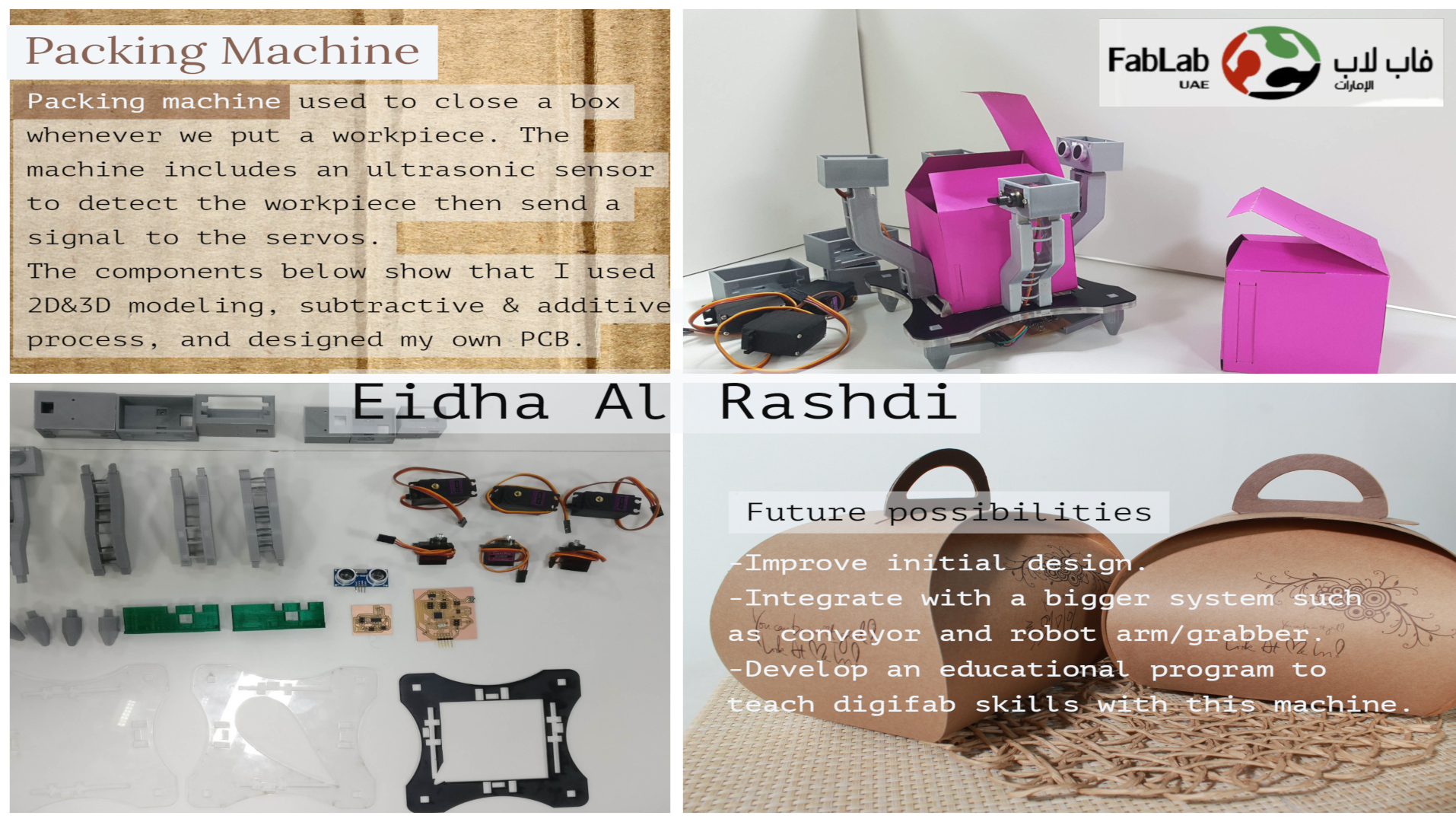
I took some time to choose this idea but finally I decided to build the first module of my big future system. My project is a packing station. The project is a machine that can pack a box that contains a product. I used three servos to fold the box and an ultrasonic sensor to detect when the customer puts the product in the box.
I already mentioned the bill of material and my plan in Applications and Implications week also you can check what I faced when I worked on this project in Project Development week. I managed to finish the electronic part in input week and output week.
| Parts | Cost in USD |
|---|---|
| MG90S Metal Gear RC Micro Servo For RC Model | 3.77 |
| Servos Digital MG996 Servo Metal Gear | 26.41 | 3.77 |
| HC-SR04 Ultrasonic Sensor | 4.29 |
| ATTINY44A-SSU-N microcontroller | 1.18 |
| LED WHITE YELLOW 260MCD 1206 | 0.25 |
| RES 0.0 OHM 1-4W 5% 1206 SMD- | 0 |
| RES 499 OHM 1-4W 1% 1206 SMD- | 0.01 |
| RES 10.0K OHM 1-4W 1% 1206 SMD | 0.01 |
| CAP CERAMIC 10PF 50V NP0 1206- | 0.04 |
| CAP CER 10UF 35V Y5V 1206- | 0.07 |
| CAP CER 10UF 35V Y5V 1206- | 0.18 |
| DIODE SCHOTTKY 1A 100V MINI-SMA- | 0.19 |
| ATMEGA328P-AU-ND (IC MCU 8BIT 32KB FLASH 32TQFP) | 2.87 |
| Acrylic 3mm 2400x1200 mm | 37 |
| card board | 2 |
| HIPS MIRROR 2mm 297 x 210 mm | 1.79 |
| SWITCH SLIDE SPDT 12V 100MA GW- | 0.84 |
| SWITCH TACT SMD W-GND 160GF | 0.74 |
| CER RESONATOR 20.00MHZ SMD | 0.43 |
| CRYSTAL 20.000000 MHZ 8PF SMD | 0.49 |
| 4 Positions Header Connector 0.100" (2.54mm) Surface Mount | 0.66 |
| 2.54mm 6-pin Male Header : Right Angle SMD | 0.4 |
| Filament Ultimaker PLA - M0751 Black 750g - 211399 PLA | 54.59, 1KG = 72.79 |
| FR4 Copper Clad Single sided - 10 x 15 CM | 2.86 |
| IC REG LDO 5V 1A SOT223-3 | 0.34 |
| Total cost | around 86 |
In my project, there are two components which I didn't make - the servo and an ultrasonic sensor. I will mention the last design of the component and what I think is the best because I changed the design a few times and you can go back to Project Development week to see what I did. I designed and printed the feet that will lift the project. I divided the base into three layers. The first one I 3D print it and it has a holder in the bottom like a slide for the boards. It has holes for the screws and other things - the upper two layers have the same holes. The second layer is 3mm acrylic, I cut it using laser cutter. This layer has a holder to fix the box in place with a square recessed by 2mm. The third one is 2mm acrylic, cut using the laser cutter. I designed four towers with holes to fix them to the base with a screw. About the towers, one is for the sensor and the other three towers are for the servos. I designed a holder for the sensor. There is one servo tower taller than the other two and this is opposite to the sensor. The other two are the same height. I decided to make the servo holder, the towers and the arms removable to allow the customer to have more choices and to be modular.
Packing machine by Eidha Alrashdi is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Based on a work at http://fab.academany.org/2018/labs/fablabuae/students/eidha-alrashdi/final.html.
I learned a lot of things during this period, these things changed my of thinking also it expanded my imagination and creativity. I want to first thank my friend maytha for introducing me to fablab and Ahmed for helping to sign for the fab academy. Thank God I joined fab academy and thanks to Hamdan Bin Rashid Al Maktoum Award for offering sponsorship. Also, big thanks to my instructor wendy to guide us through the academy. Also big thanks to the fablab staff for their big help and for my colleagues which they help me many times when I was stuck and not to forget all people who shared their knowledge on the internet. Without the help of all these people, I will not be able to learn and achieve what I did.