LINK TO OUR GROUP PAGE:- VISIT
As mentioned in the MECHANICAL DESIGN WEEK
,we were running out of time and therefore we decided to use custom made boards for the automation of our machine.We decided to use A4988 Stepper Driver,Ramps14 and Arduino Mega for
automation of our printer.
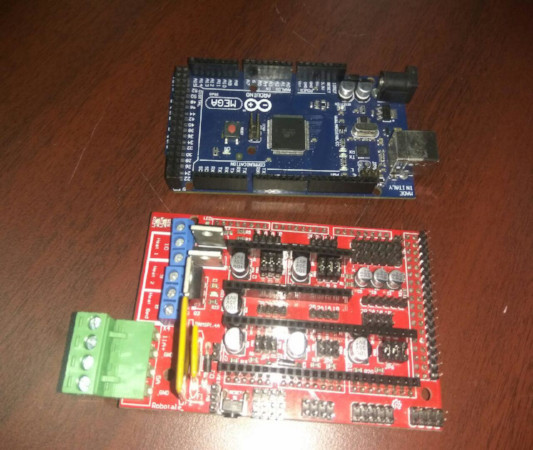
Arduino UNO and Ramps14
A4988 STEPPER DRIVER
A4988 microstepping bipolar stepper motor adjustable current limiting, over-current and over-temperature protection(by means of heat sink), and five different microstep resolutions (down to 1/16-step).
It operates from 8 V to 35 V and can deliver up to approximately 1 A per phase without a heat sink.Major features of A4988 stepper driver is Simple step and direction control
interface, Five different step resolutions: full-step, half-step, quarter-step, eighth-step, and sixteenth-step.
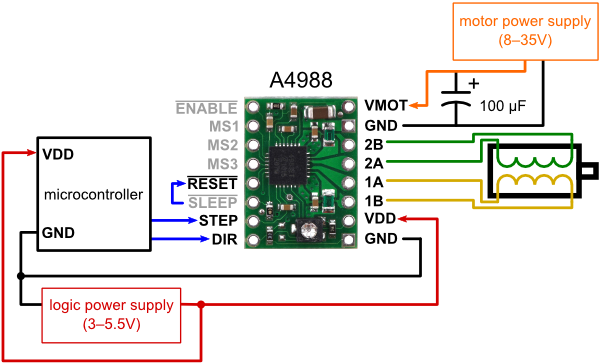
A4988 stepper driver
Ramps14
Ramps is short for reprap Arduino mega pololu shield, it is mainly designed for the purpose of using pololu stepper driven board (similar to 4988 driven board). Ramps can only work when connected to its mother board Mega 2560 and 4988/DRV8825.
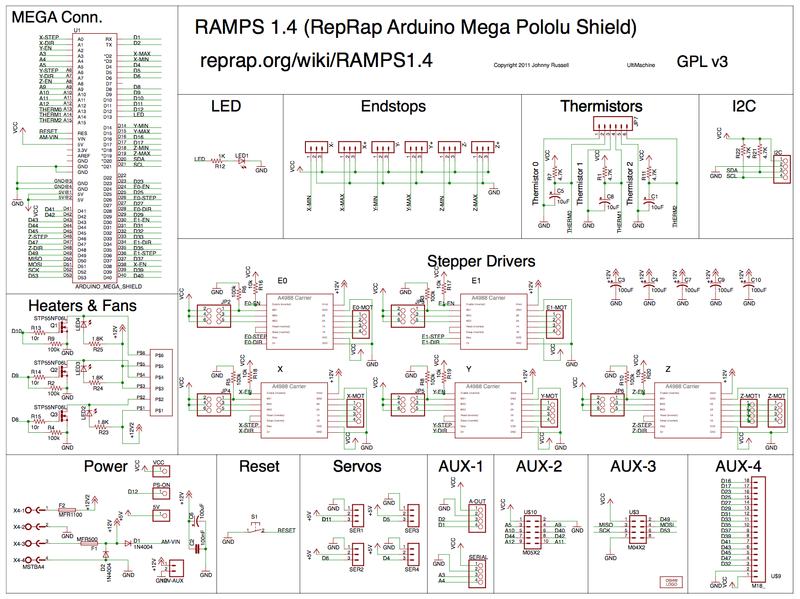
Ramps schematic
Wiring the connections
After arranging the parts the wiring and connection job was done by me.We need male pinouts for connecting to ramps and for extending I soldered the male pins with ribbon wires and the connection junctions were effectively masked with sleeves.

using hot gun for packing the sleeves
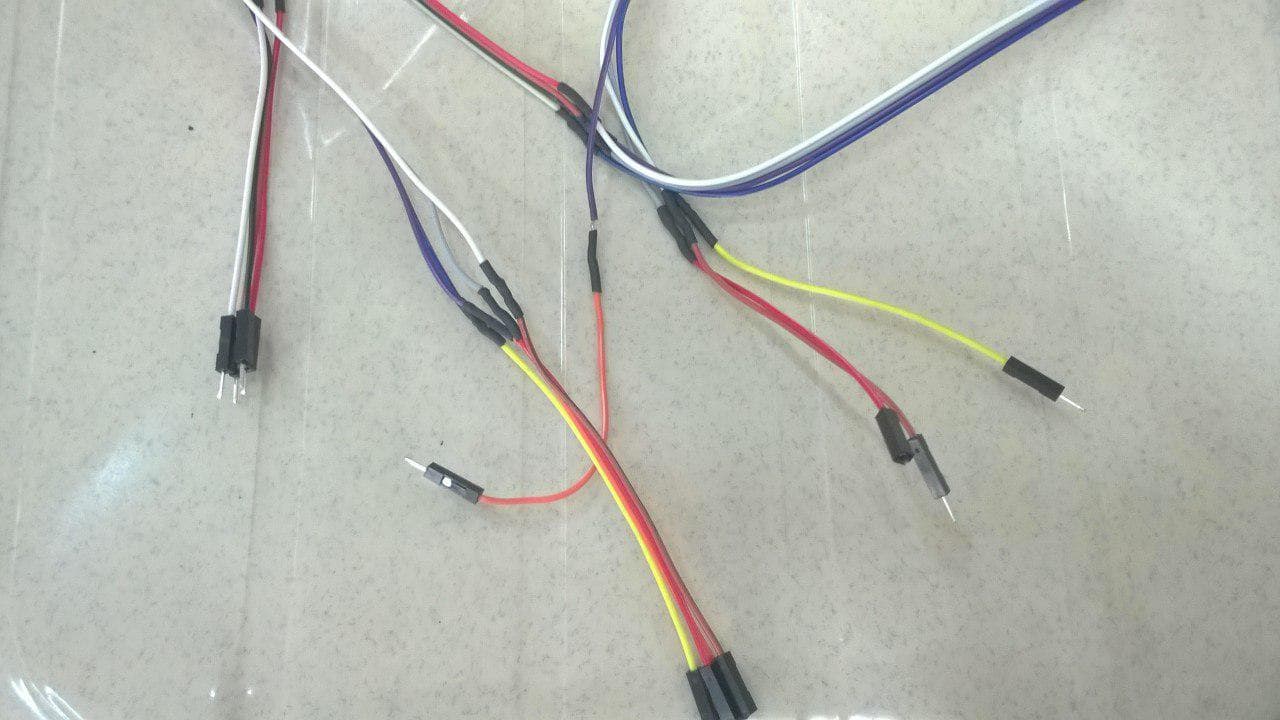
Final look
PROGRAMMING
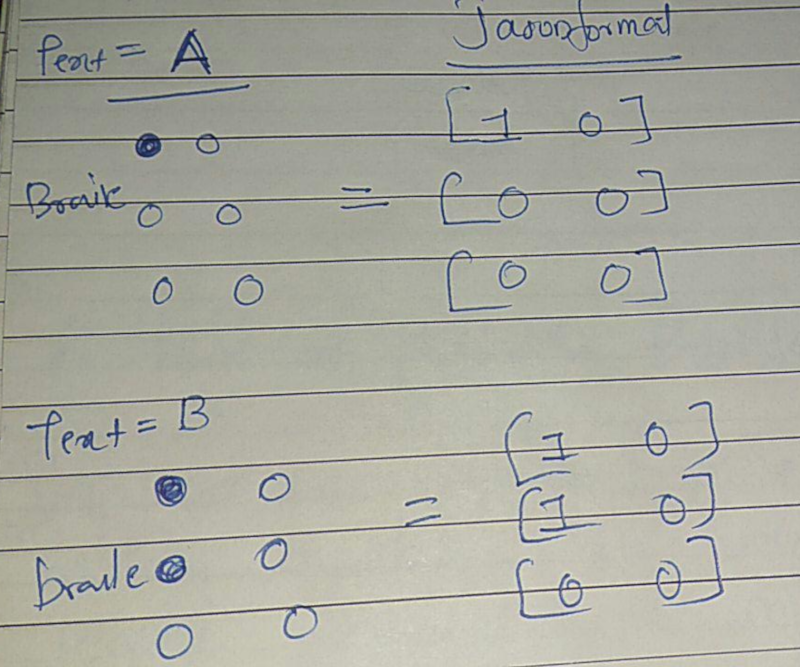
Coming to the programming part,my job was to create the .json file .I entered every text of braille language into 3x2 matrix and store it in jason format.I had done this for alphabets
A to Z and numbers 0 to 9.

coding
POSTER DESIGN
For the presentation of our Machine to Neil we need a video and a poster,Akhila was behind the video while I designed the poster.I have used coreldraw for designing the poster
but I forgot to save the original file,I have only exported the .jpg file.

Poster design
Working video