Catapult
The most impressive and least effective war machine for your lab
In spite of all the inexperience and difficulties, we wanted to make the most awesome machine our lab ever had. It had none, so it was actually a very low level competition, and even though we were so close to miss that target (pun intended), still we had a lot of fun in crafting a mighty catapult.
Mechanic
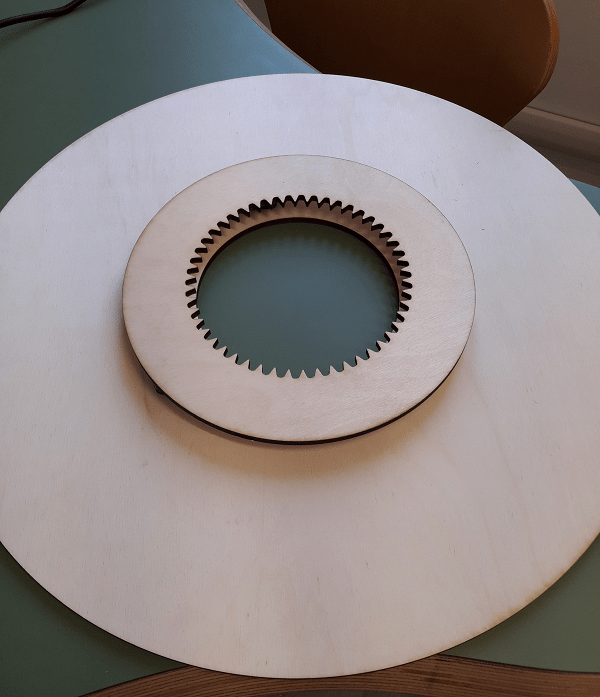
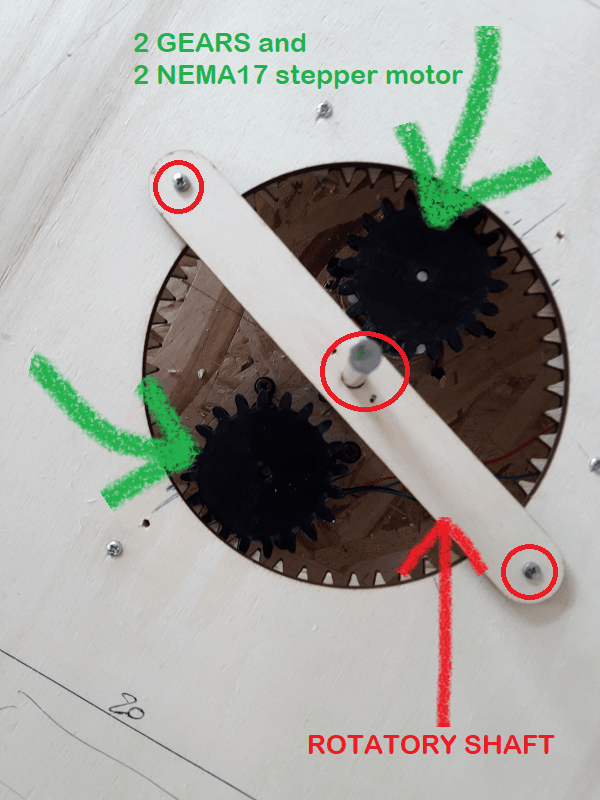
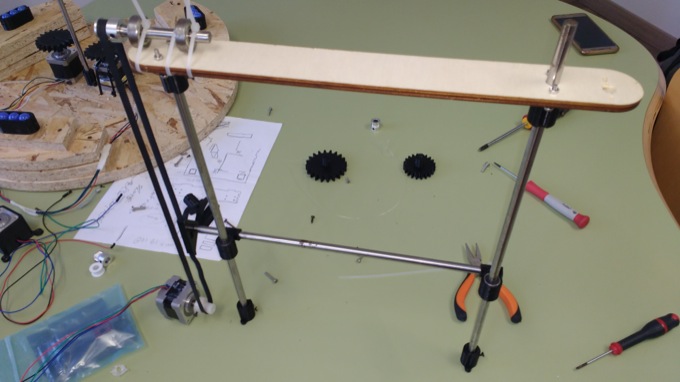
Our mechanical design is related to a rotating plate moved by two NEMA17 stepper motors with the help of gears and a rounded rack. In order to avoid the rolling fricition between the platform and the basis' supports we put some makeshift marbles as thrust bearings.

Then, we cut some plywoods pieces with a lever shape and we put them on the rotating plate. Our fulcrum is set on a vertical position and it is moved by a NEMA17 stepper motor that allows us to wind a twine and it provides to the lever to be moved up and down.
Then, we cut some plywoods pieces with a lever shape and we put them on the rotating plate. Our fulcrum is set on a vertical position and it is pulled via a spring by a NEMA17 stepper motor that allows us to wind a twine and it provides to the lever to be moved up and down.


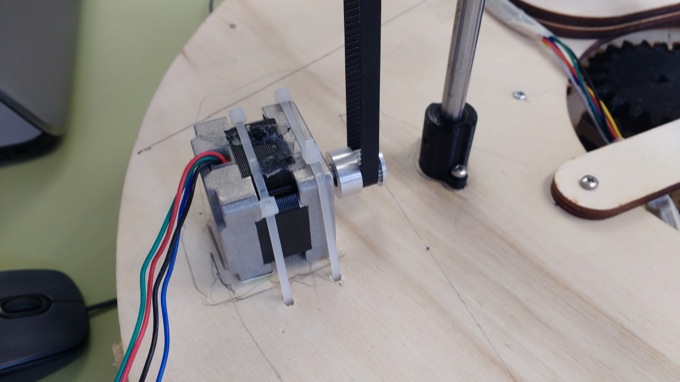
Then, we also put two vertical shafts and an horizontal one. The latter one can be regulated in height thanks to a NEMA 14 stepper motor and a toothed belt. It allows us to change the horizontal shaft value in order to stop the catapult's lever.
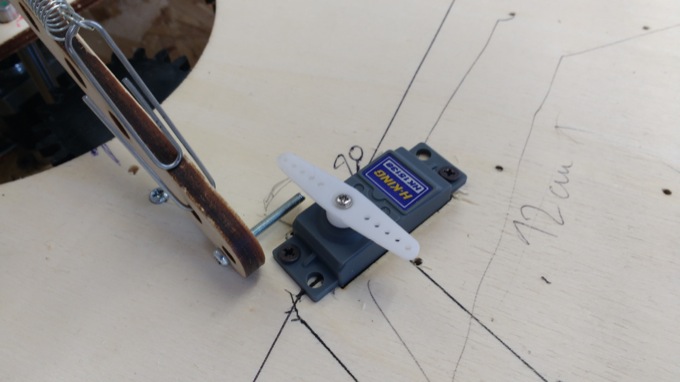
Furthermore the lever is hold in place with a tab by stepper motor. When this servo turns the lever is able to move, the spring is released and the catapult throws!
Interface
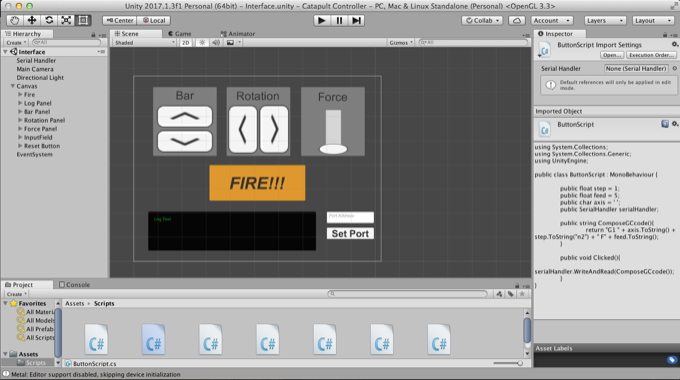
For the interface we've chosed to set up a simple Unity app that makes you adjust rotation, height and force of the catapult. The app sends GCODE movese crafted at runtime to adjust the throw as requested and put everything back as soon as the launch is done.
Links
Link to Onshape project
Link to self-made parts' STL files
Link to Unity project
Giuseppe's contribution to the project:
Week 14
Week 15