Final Project...
Trichitalchen
The concept here is to develop a small robot submarine powered by three biomimetic fin propulsors which will allow it to move nearly holonomically through weed-choked or other complex environments where propellers would get tangled or damage fragile species. The project is motivated in part by a some recent sad episodes on campus and nearby where children have drowned in local waterways and police divers have not been able to locate their bodies.
The design draws its inspiration from the clown knifefish (Chitala in Bengali), which in normal swimming holds its body rigid and propels itself by generating a travelling wave along its ventral fin.
.jpg)
There have been plenty of knifefish-inspired robots which use multiple servo motors and careful timing to generate a wave from waving fin rays. My students and I have been working on a crankshaft driven wave propulsor for many years now. The first of the designs was the Gymnobot.

In this unique design, triangular fin rays were driven by a pair of crankshafts which rotated the base, causing the tip of the triangle to oscillate laterally. The use here of a mechanical crankshaft simplifies the design, improves the robustness, and reduces the control problem to a single variable (wave speed).

The second morph of the wave drive was designed for a submarine called Ronquil, named after a fish which propels itself with a wave on its dorsal fin. Here the crankshaft was replaced with a set of internal cams which drove the fins through four-bar linkages such that they translated laterally instead of rotating. This increased the amplitude and reduced the off-axis flow.

The third version was a human-powered submarine called Trichitala. This machine used crankshafts to drive fin rods linked with a stretchy skin like Gymnobot. To avoid excessive loads through the crankshafts, power was provided through parallel driveshafts individually to four crankshaft segments. The length of the finrods was adjusted such that the amplitude of oscillation increased from head to tail.
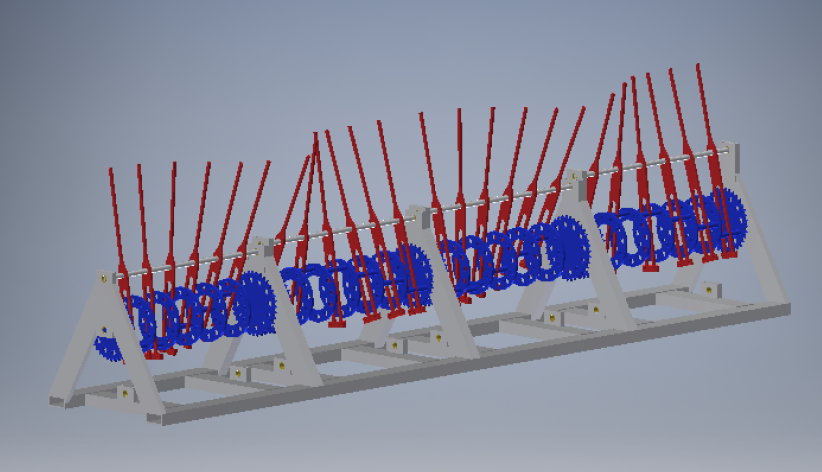
The crankshaft design limits the polyvalence of the drive system. The real knifefish and its bioinspired servo-driven mimics have individual control over the fin rays, and so can generate multiple waveforms which allow the flow to be driven in many directions. The Trichitala makes up for this limitation by incorporating three drives, arranged to make possible the control of surge, pitch and yaw. Limited sway and heave are also possible.

The Trichitalchen is to be a fully operational robotic model of the full-size Trichitala. It will use the same crankshaft-driven wave design, with a single motor on each of the three propulsors. The finrays will be 3D printed and linked by a stretchable fabric skin.
The eventual operational requirement for the robot will be to propel a side-scan sonar around the bottom of a canal, pond or lake. The sonar unit (Imagenex Sportscan) will need to be scanned and the Trichitalchen hull will need to be designed to mate with it. The external hull will be cylindrical, with extensions to accommodate the three propulsors and their motors. The plan is to make it out of fibreglass cast in a CNC-machined mould. A watertight internal hull (machined out of an ABS bar) will house the electronics.

The robot will be equipped with a sensor suite to monitor its attitude in the water and the flow of water over its skin, possibly using an artificial lateral line we've developed in the lab. The sensor data will be used to control the three motors and probably also some steering fins.
The design, manufacture and programming of the Trichitalchen should make use of pretty much all of the skills I expect to learn in the FabAcademy course. Time will be of the essence, and may sink (pardon the pun) the project before it is entirely complete. I've therefore done as I always do with my thesis students, and have designed an early exit point into the project, in case I've bitten off more than I can chew: all of the elements of the course could also be incorporated into a single fin robotic surface vehicle, if the submarine turns out to be too much.